XiaoMi-AI文件搜索系统
World File Search System4X

自我监督的气候降级
气候变化是我们星球今天面临的最关键的挑战之一。上升的全球温度已经在影响地球的天气和气候模式,而不可预测和极端事件的频率增加。气候变化研究的未来预测基于地球系统模型(ESMS)等计算机模型。气候模拟通常由于所需的高计算资源而在更粗的网格上运行,然后经历较轻的缩减过程以获取更细网格的数据。这项工作提出了一个自制的深度学习模型,该模型不需要高度分解地面真相数据才能进行缩小。这是通过利用显着的分布表和在运行时为单个数据点的天气变量之间的隐藏依赖性实现的。我们提出了三个气候特异性的组件,它们很好地代表了潜在的天气变量的模式,并学习了复杂的可变化依据。对2倍,3倍和4倍缩放系数进行了广泛的评估表明,我们的模型比现有基线获得8%至47%的性能增长,同时大大降低了整体运行时。证明的性能,不依赖高分辨率地面真相数据使我们的方法成为未来气候研究的宝贵工具。

产品信息ZHN-S - 用于行业和研究应用中的质量控制和标准测试任务的强大纳米Indententer
优点和功能•在测试准备和测试性能期间,Inspectorx中的动画和预定义应用程序支持操作员。这减少了操作错误,并确保短期培训期。•受过训练的专业人员,而不仅仅是科学和研究员工,可以操作该工具并评估结果,从而降低了测试的总体成本。•与市场上的任何其他仪器相比,最简单,最强大的尖端变化,而无需再现:校准数据明确分配给了测量提示。•出色的动力学模块可以特别准确,快速校准测量尖端以及涂料所需的深度分辨测量值。•带有18百万像素颜色相机的光学元件允许4倍缩放,而不会损害分辨率。这涵盖了多达三个经典左轮手枪镜头的放大范围,从而消除了更换镜头的需求。•由于自动拟合功能和测量数据分析的范围选择,对图层的测量值非常容易评估。•Zwickroell根据ISO 14577:2015在Inspectorx中实施了标准符合标准的径向位移校正。•刚性轴的刚性框架设计正好在运动轴中(无倾斜矩)•光学和凹痕器之间的高定位精度,大于1µm。
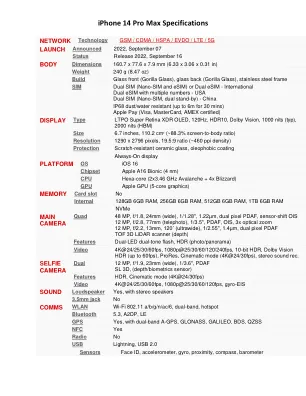
iPhone 14 Pro Max规格
发布于2022年9月7日宣布启动2022年9月16日的身体尺寸160.7 x 77.6 x 77.6 x 7.9毫米(6.33 x 3.06 x 0.31 x 0.31英寸)重240 g(8.47盎司)建造玻璃前部(gorilla玻璃),玻璃玻璃(Gorilla玻璃),玻璃架(Gorilla Glass),sim sim sim sim nano sim -esim nano sim -esim nano sim -esim - - 美国双SIM SIM(Nano -SIM,双待机) - 中国IP68防尘/防水性(30分钟内最高6m)Apple Pay(Visa,MasterCard,Amex认证)显示类型LTPO超级Retina XDR OLED,120Hz,120Hz,120Hz,120Hz,120Hz,HED10,HDR11,Dolby Vision,1000 Nits(1000 Nits),1000 Nits(Typ),2000 NITS(典型),2000 nits(2000 nit),〜8 88英寸(HBM),〜8 88英寸(HBM),〜8 88英寸(HBM),屏幕与体型比)1290 x 2796像素,19.5:9比率(〜460 ppi密度)保护抗刮擦的陶瓷玻璃,含有含水的陶瓷玻璃,含有含水量的涂料始终在上方显示平台OS iOS 16芯片组iOS 16芯片组苹果A16 Bionic A16 Bionic A16 Bionic(4 nm)CPU HEXA蛋白(5核图形)存储卡插槽无内部128GB 6GB RAM,256GB 6GB RAM,512GB 6GB 6GB RAM,1TB 6GB RAM NVME NVME主机

bevfastline:自动停车申请的单拍快速BEV线检测
摘要:在自主停车场景中,准确的近场环境感知对于平稳操作至关重要。停车线的检测与富有理解的车道检测不同,由于缺乏方向,位置和色彩,图案和背景表面的各种外观的空间一致性而提出了独特的挑战。因此,依赖锚和偏移的车道检测的最新模型并非直接适用。本文介绍了BevFastline,这是一种新颖的端到端线条标记鸟类眼视图(BEV)空间中的架构,该空间是为360◦多相机感知应用而设计的。bevfastline将我们的单发线检测方法与先进的反视角映射(IPM)技术集成在一起,尤其是我们的快速分裂技术,以在各种空间上下文中有效地检测线条标记。此方法适用于3级自动化车辆中的实时硬件。BEVFastline准确地将停车线定位在BEV空间中,最高为10厘米。我们的方法,包括更快的快速SPLAT和单杆检测,超过LSS及其准确性,达到80.1%的精度,90%的召回率,几乎使基于BEV的分段和多线线模型的性能翻了一番。这种简化的解决方案在复杂的,动态的停车环境中非常有效,在自我车辆周围10米以内的高精度定位。
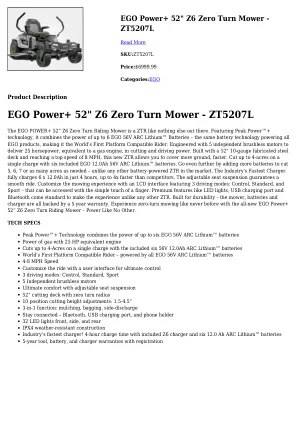
自我力量+ 52英寸Z6零转割割草机 - 景观供应
自我功率+ 52英寸Z6零骑行割草机是ZTR,就像其他地方一样采用Peak Power™+技术,它结合了高达6个EGO 56V ARC LITHIUM™电池的功率 - 相同的电池技术为所有EGO产品提供动力,使其成为世界上第一个兼容的骑手。采用5个独立无刷电动机设计,可在切割和驾驶功率方面提供25马力,等效于燃气发动机。使用52英寸的10号制造钢甲板制造,并达到8 mph的最高速度,该新的ZTR可以使您更快地覆盖地面一次充电,最多可将4英亩的土地切成六英亩,包括六个EGO 12.0AH 56V ARC LITHIUM™电池。与市场上的任何其他电池供电的ZTR不同,可以添加更多电池以削减5、6、7或尽可能多的英亩。该行业最快的充电器在短短4个小时内收取6 x 12.0AH的费用,比竞争对手快4倍。可调座悬架可确保平稳的骑行。使用具有3种驾驶模式的LCD接口自定义割草体验:控制,标准和运动 - 可以用手指的简单触摸来访问。高级功能,例如LED灯,USB充电端口和蓝牙等优质功能,以使体验与其他任何ZTR不同。为耐用性而构建 - 割草机,电池和充电器都有5年的保修。在全新的自我力量+ 52英寸Z6零转弯割草机上,从未像现在这样的零割草

通过人工智能为配备 AR 的操作员提供支持的弹性制造系统
$evwudfw²6xSSO\ fkdlqv dqg pdqxidfwxulqj v \ vwhpv urexvwqhvv dqg uhvlolhqfh uhvlolhqfh uhvlolhqfh duh iru pdq \ \ xfwlrq SurfHvVhv 7zr grpdlqv duh fuxfldo wr dfklhyh vxfk sxusrvh sxusrvh wkh iruphu lv idvw dqg frpsuhkhqvlyh LRQ PDNLQJ 7KH ODWHU UHIHUV WR WKH LQWHUYHQWLRQ E \ rshudwruv deoh wr ehwwhu lghqwli \ sugrohxwhr \ sugrohxwhwhwhwhwh rshudwhwh rshudwlrqv dlphg dlphg dlphg dw il dw il s lw u ehwwwh u ehwq v v v v v v v v v v u suhvhqwv dq lqwhjudwhg dssurdfk hqfrpsdvvlqj d fskurdwgwg,$ vrdvhwg,dfk wr prqlwru dqg dqg ghwhfw ghwhfw fulwlfdo fulwxdwlrqv ixdwlrqv ixoxOO p vxssruwlqj rshudwruv lq wkh wilhodwlqlqlqlql lqlwh fwlrqdo frqwlqxrxv frqqhfwlrq $ fwlylwlhv lq lq lq wkh frqh frqh frqh frqh frqh frqh frq frq frq frq frq frq gxv dwphwqlwhwwwwwwwwwww qwlqj wkh sursrvhg dssurdfk dqg ghprqvwudwlqj lq dq dxwrpdwhg surgxfwlrq olq olq olq olq olq olqh wkh hiihfwlyhqhvv ri wkh dssurdfk h lqglfdwruv ghprqvwudwhv wkh vrxqgqhvv ri wkh sursrvhg vroxwlrq dqg lpsohphqwdwlrq phwkrgrorj问
AHEAD:用于主动 BMI 边缘设备中 MLP 神经网络硬件生成的自动整体能量感知设计方法
摘要:基于主动式脑机接口 (BMI) 控制边缘设备的高级认知功能预测是一项改善残疾人生活质量的新兴技术。然而,由于神经元的非平稳性质,维持多单元神经记录的稳定性变得困难,并且会影响主动式 BMI 控制的整体性能。因此,需要定期重新校准以重新训练神经网络解码器以进行主动控制。然而,重新训练可能会导致网络参数(例如网络拓扑)发生变化。就用于实时和低功耗处理的神经解码器的硬件实现而言,修改或重新设计硬件加速器需要时间。因此,处理低功耗硬件设计的工程变更需要大量的人力资源和时间。为了应对这一设计挑战,这项工作提出了 AHEAD:一种用于主动式 BMI 边缘设备中多层感知器 (MLP) 神经网络硬件生成的自动整体能量感知设计方法。通过对主动式 BMI 设计流程进行全面分析,该方法明智地利用了智能位宽识别 (BWID) 和可配置硬件生成,它们自主集成以生成低功耗硬件解码器。所提出的 AHEAD 方法从训练过的 MLP 参数和黄金数据集开始,并在性能、功耗和面积 (PPA) 方面产生高效的硬件设计,同时将准确性损失降至最低。结果表明,与现场可编程门阵列 (FPGA) 上的浮点和半浮点设计相比,所提出的方法性能提高了 4 倍,功耗降低了 3 倍,面积资源减少了 5 倍,并且具有精确的准确性,这使其成为一种有前途的主动式 BMI 边缘设备设计方法。

SPIE 会议纪要
在集总元件 (LE) 配置中驱动电光调制器可实现较小的占用空间、降低功耗并提高高速性能。传统直线 LE 调制器的主要缺点是需要较高的驱动电压,这是由于其移相器较短所致。为了解决这个问题,我们引入了一种具有蛇形移相器的 Mach-Zehnder 调制器 (M-MZM),它可以在 LE 配置中驱动,同时保持光学移相器长度与行波调制器 (TW-MZM) 相同的数量级。需要考虑的设计限制是设备的光学传输时间,它限制了整体电光带宽。首先,我们回顾了与 TW-MZM 相比 LE 调制器的整体功耗改进以及带宽增强,同时还考虑了驱动器输出阻抗和线或凸块键合的寄生效应。然后,我们报告了使用标准 CMOS 兼容工艺在绝缘体上硅 (SOI) 晶片上制造的基于载流子耗尽的 M-MZM 的设计、实现和实验特性。制造的 M-MZM 具有低掺杂 (W1)、中掺杂 (W2) 和高掺杂 (W3) 结,需要 9.2 V pp、5.5 V pp 和 3.7 V pp 才能完全消光,光插入损耗分别为 5 dB、6.3 dB 和 9.1 dB。对于所有三个 M-MZM,使用 50 Ω 驱动器和终端电阻以 25 Gb/s 记录睁眼图。对于无终端电阻的 M-MZM,可以实现更高的数据速率,前提是将低输出阻抗驱动器通过引线或凸块键合到调制器上。最后,我们将 M-MZM 与 TW-MZM 的功耗进行比较,结果显示 M-MZM 在 25 Gb/s 时功耗降低了 4 倍。
获得Nerdy LLC遗传学答案
发现一个全面的遗传学和遗传单元课程,包括减数分裂,主导/隐性特征,Gregor Mendel,Punnett Squares,蛋白质合成,DNA,基因工程等。This unit bundle features daily lesson activities, interactive notebook templates, word walls, task cards, graphics-packed PowerPoints, differentiated vocabulary, aligned notes pages, labs, projects, and asking questions that align with the following Disciplinary Core Ideas: * MS-LS3.A: Inheritance of Traits * MS-LS3.B: Variation of Traits The curriculum also covers systems and system models, scale, proportion, and数量,因果,模式,能量和物质,结构和功能,稳定性和变化。学生将开发和使用模型来描述为什么对基因(突变)的结构变化可能影响蛋白质并导致对生物体有害,有益或中性作用。为了进一步增强学生的理解,本单元捆绑包包括: *无性繁殖导致后代具有相同的遗传信息 *性繁殖导致后代和遗传变异这种全面的课程非常适合教授有关遗传学和遗传性的完整单元。**探索我们的生物学和生命科学的首选**通过我们精选的选择,为您的生物学和生命科学研究发现了最佳产品。这是三个专家推荐的项目:1。** sno-ball sillies Genetics Simulation套件**:使用此交互式套件深入研究遗传学模拟,该互动套件旨在使学生掌握复杂的概念。2。3。** FLINN高级化合物显微镜**:通过提供4倍,10倍和40倍放大功能的高级显微镜提高观察技巧。**解剖学和生理学幻灯片集**:使用这种综合幻灯片设置进行详细探索,获得人体解剖学和生理学的动手经验。**浏览更多产品**获取旨在促进学习和参与的整个生物学和生命科学产品。

基于优化的U-NET的2D图像的单眼深度估计
从2D图像中估算深度在各种应用中至关重要,例如对象识别,场景重建和导航至关重要。它在增强现实,图像重新关注和细分方面具有显着优势。在本文中,我们根据传输学习编码器和高级解码器结构提出了一个优化的U-NET网络,以估算单个2D图像的深度。编码器– decoder架构是从Resnet152v2构建的,作为编码器和改进的基于U-NET的解码器,以实现准确的深度预测。引入的RESNET152V2网络已在广泛的Imagenet数据集上进行了预估计,该数据集具有为大规模图像分类提取丰富且可推广的特征的权重。该提出的编码器可以具有先验知识来减少训练时间并改善对象位置识别。在解码器中设计的提议的复合上采样块(CUB)应用了2倍和4倍双线性插值,结合了一速式转置卷积,以扩展从编码器获得的低分辨率特征图,从而使网络恢复了更详细的细节。跳过连接用于增强解码器的表示能力。每个向上采样块的输出与相应的池化层串联。来自不同量表的特征融合有助于捕获本地和全球上下文信息,从而有助于更准确的深度预测。此方法利用RGB图像和深度图作为NYU DEPTH DATASET V2的训练输入。实验结果表明,基于转移学习的编码器,再加上我们提出的解码器和数据增强技术,可以使复杂的RGB图像转换为准确的深度图。系统根据深度数据范围为0.4至10 m,准确地对不同的深度范围进行了分类。通过使用渐变色尺度将不同的深度映射到相应的颜色,可以在2D图像上执行精确的深度分类。