XiaoMi-AI文件搜索系统
World File Search SystemACS3
NASA 先进复合太阳帆系统 (ACS3) ...
• DCB/ACS3 7 米吊杆技术可扩展至 14 米至 16.5 米的可展开吊杆长度。 • 先进复合太阳帆项目 (ACS3) 将展示 DCB 复合吊杆技术在太阳帆应用中的应用。

先进复合太阳帆系统 (ACS3)
ACS3 项目是一项技术演示任务,利用可部署复合吊杆 (DCB) 项目提供的 7 米可卷起复合吊杆部署 81 平方米反射式太阳帆 [1],即图 1 所示的太阳帆系统。图 2 显示了航天器的关键元件。该项目是美国宇航局兰利研究中心和美国宇航局艾姆斯研究中心的联合项目。帆杆子系统 (SBS) 是 ACS3 航天器(12U 立方体卫星)的有效载荷。SBS 结合使用几种传统机制,以一次流畅的动作同时部署复合吊杆和轨道上的太阳帆。这些机制的设计和测试历时 5 年,在此之前,近地小行星侦察兵 (NEA Scout) 任务曾采用一种潜在的嵌入式替代设计,该设计利用了复合材料吊杆,达到了合格水平,但未被选为该任务的最终飞行设计 [2]。德国航空航天中心 (DLR) 已发表类似的较低技术就绪水平 (TRL) 工作 [3]。
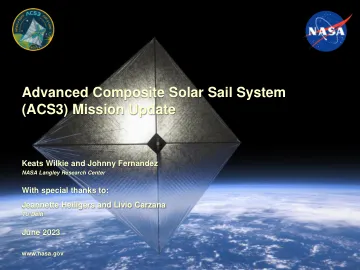
高级复合太阳帆系统(ACS3)任务更新
用于SB和相机系统的控制航空电子学(AS),用于帆部署捕获的摄像头系统以及作为飞行软件(FSW)。- NASA Langley研究中心(LARC) - ACS3 SAIL/BOOM子系统(SBS)。- AST太空移动美国 /纳米汽车美国航天器总线。- 纳米载体美国 /国外 - 分配器。- 圣克拉拉大学机器人系统实验室 - ACS3操作支持。- 火箭实验室 - 发射提供商。

美国国家航空航天局先进复合太阳帆系统 (ACS3) 技术演示项目概述
1 首席研究员,ACS3 项目,结构动力学分会,AIAA 高级成员。2 首席研究员,DCB 项目,结构动力学分会,AIAA 成员。3 研究航空航天工程师,结构动力学分会,AIAA 成员。4 机械设计工程师,分析服务与材料公司,结构动力学分会。5 研究航空航天工程师,结构动力学分会,AIAA 成员。6 材料科学家,国家航空航天研究所,先进材料与加工分会。7 SBS 总工程师,结构动力学负责人,结构和热系统分会。8 研究航空航天工程师,结构动力学分会。9 SBS 项目经理,空间技术和探索理事会。10 SBS 系统工程师,系统工程和工程方法分会。11 项目经理,ACS3 项目。12 项目系统工程师,ACS3 项目。13 研究航空航天工程师,DLR 复合结构与自适应系统研究所。 14 德国航空航天中心复合结构与自适应系统研究所研究航空航天工程师。15 航空航天工程学院助理教授。
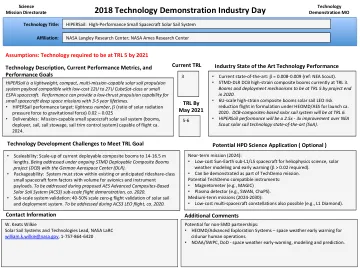
2018技术演示行业日-SOMA -NASA
•缩放性:将电流可部署的复合动臂扩大到14-16.5 m的长度。与德国航空航天中心(DLR)正在进行的STMD可部署复合动臂项目(DCB)有关。•包装:系统必须存放在现有或预期的乘车式小型航天器形式中,并具有航空设备和仪器有效载荷的体积。将在拟议的AES高级复合材料太阳帆系统(ACS3)子尺度飞行示范中解决。2020。•子尺度系统验证:40-50%比例零G的太阳帆和部署系统验证。将在加利福尼亚州ACS3 Leo Flight期间解决。2020。

使用立方体和...
GLIDE(HPD) GTOSAT(HPD) LAICE(HPD) LLITED(HPD) PETITSAT(HPD) PUNC H(HPD) REAL(HPD) SOLAR CRUISER(HPD) TRACE RS(HPD) SPORT(HPD) SUNRI SE (HPD) IT C (HPD) ESCAP ADE (HPD) SWFO-L1 (JASD) JAN US (PSD)LUNAR开发器(PSD)ACS3(STMD)CISLUNAR Explorer(STMD)单击A(STMD)单击B / C(STMD)Capstone(STMD / HEOMD)COURIER SEP SEP DEMO(STMD)CU-E3(STMD)CU-E3(STMD)CU-E3(STMD)CU-E3(STMD)cu-e3(stmd)