XiaoMi-AI文件搜索系统
World File Search SystemAGVS

AGV-AMR移动机器人
•一种适合您的流量,负载类型和环境的解决方案,•安装的扩展容量,•提供对安装的长期支持的技术团队,•持久,稳健的安装,我们的AGV的平均寿命为45,000小时,•最佳的系统导航控制和本地化技术的最佳系统导航控制和可用性。


用于...
摘要。自动驾驶汽车(AGV)长期以来一直在材料处理中使用,但需要进行大量投资,例如指定特定的运动领域。作为另一种替代方案,有害和智能的车辆(AIV),由于其适应性,智力和能够处理意想不到的态度的能力而获得了吸引力。然而,诸如优化调度和路径计划以及管理路由冲突之类的挑战仍然存在。这项研究介绍了针对各种生产系统中的AIV调度和路径计划量身定制的模拟物。模拟器通过实时优化提供了预测的预测性,即预定路径和动态调度。使用Dijkstra方法确定路径,以确保AIV使用最短路线。出现路径共享冲突时,多标准优先系统就会发挥作用,并评估了其对MakePan的影响。实验结果在大多数情况下突出了AIV比AGV的优势,以及模拟器生成有效时间表的效率,不利于优先管理系统。

mmwave Radar用于工业固定和移动应用中的安全感测
•环境鲁棒性:雷达传感器可以在灰尘,水分和极端温度的环境中可靠地运行。•材料穿透:雷达可以检测非金属障碍物(例如塑料或木材)后面的物体,从而增强了检测可靠性。•远距离和高精度:雷达传感器可有效地以高精度检测各个距离的物体。•对环境干扰的抵抗力:雷达技术受到阳光,雾或反射性表面等环境因素的影响,可能会损害其他传感器类型。•多功能性:雷达传感器可以在广泛的应用中部署,从守护固定机械到确保AGVS或AMR等移动设备的安全操作。3D和对运动的高灵敏度允许重新启动预防安全功能。

3kW无线电感充电器
Wiferion的无接触式电感电池充电系统Etalink 3000自动运行,并且不含维护。该系统设计用于易于集成,限制的施工空间可用性和灵活的安装。随着能量数据的处理,可以实现最佳充电,这反过来反映在降低TCO中。最后,AGV和AMR的能源解决方案变得聪明,具有成本效益,可靠并且具有93%,高效。
自动导引车可持续能源供应的双储能系统概念
摘要:由于工业中自动导引车 (AGV) 的使用数量不断增加,以及对有限原材料(如电动汽车 (EV) 的锂)的需求不断增加,人们正在寻求一种更可持续的 AGV 移动储能解决方案。本文提出了一种双储能系统 (DESS) 概念,该概念基于电气(超级电容器)和电化学储能系统(电池)的组合,根据所需的运输距离分别使用。此 DESS 中的每个储能单元 (ESU) 都能够完全为 AGV 供电。该概念考虑了复杂物料流的要求,并最小化了 AGV 运行所需的储能容量。进行了能量流分析,并进一步以此为基础得出三种可能的电路概念以实现技术。将电路概念与相关工作中的其他方法进行了比较,以区分混合储能系统 (HESS) 的功能。通过将能量流状态映射到有源电路元件来验证概念的功能。最后,给出了一种将控制策略实现为状态机的方法,并得出了有待进一步研究的结论。
特殊机器人操作的路径计划
自70年代早期作品以来,机器人路径计划的问题一直是无数调查的重点,尽管文献中有大量结果,但仍然是一个引起极大兴趣的话题。In virtually all robotic applications it is required to somehow define a feasible and safe path, and such a problem can be cast and solved in many ways, given the several possible combination of robots - industrial robots, Autonomous Guided Vehicles (AGVs), Unmanned Aerial Vehicles (UAVs), underwater vehicles - and scenarios - a production line, a warehouse, an hazardous mountain - and therefore a large number of approaches and解决方案已经并且正在调查。本章的目的是概述此类广泛的文献,首先简要回顾了路径计划中使用的一些经典和通用的方法,然后通过专注于与行业,医疗机器人和机器人焊接的AGV相关的某些特定于应用的问题。此选择是由这三个应用程序中路径计划问题的显着相关性所激发的。然后,分析了一种极大的工业兴趣(例如机器人喷漆)的单一应用。描述了其特定功能,并考虑了任务建模和路径计划的几种技术。进行了这些技术之间的详细比较,以突出每种技术的利弊,并提供一种方法来选择最适合特定机器人喷漆应用的方法。
自动导向车辆的新的Ultra类
您的目标是什么?自主或精益生产?选择自动导向车辆时,必须根据生产过程考虑数字标准。自治问题或灵活性主题通常被关注与用户的讨论。灵活性过多或太少会降低生产效率并提高成本。更重要的问题是:您的制作目标是什么?精益过程?最大可用性?最大的灵活性和自主权?Utrack是生产有效运输的基准。与自主AGV相比,该系统已经在整个投资期内,努力和成本最低。
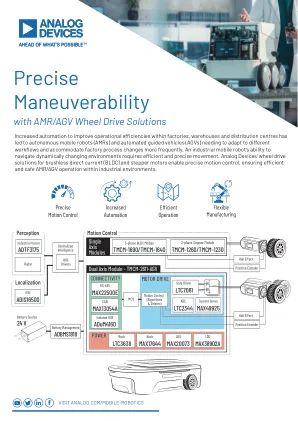
与AMR-AGV-WHEEL-DRIVE-...
提高自动化以提高工厂,仓库和配送中心的运营效率,导致了自动移动机器人(AMR)和自动化的导向车辆(AGV),需要适应不同的工作流量并更频繁地适应工厂流程。工业移动机器人能够导航动态变化的环境的能力需要有效而精确的运动。用于无刷直流电(BLDC)和步进电动机的模拟设备的车轮驱动解决方案可实现精确的运动控制,从而确保在工业环境中有效且安全的AMR/AGV操作。