XiaoMi-AI文件搜索系统
World File Search SystemAMRS

3kW无线电感充电器
Wiferion的无接触式电感电池充电系统Etalink 3000自动运行,并且不含维护。该系统设计用于易于集成,限制的施工空间可用性和灵活的安装。随着能量数据的处理,可以实现最佳充电,这反过来反映在降低TCO中。最后,AGV和AMR的能源解决方案变得聪明,具有成本效益,可靠并且具有93%,高效。
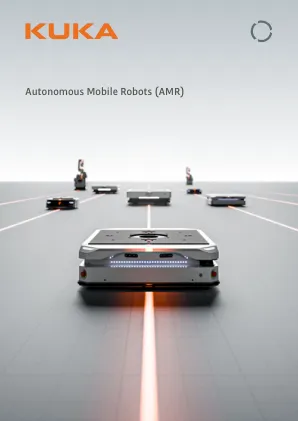
自动移动机器人(AMR)
将我们的重点转移到AMR,这些系统优雅地结合了模拟性和适应性。他们直接的编程和固有的安全功能使它们与众不同。他们轻松,巧妙地处理障碍物,工人和错综复杂的空间,例如门口和升降机。以及运营的复杂性,这些机器人提供了令人信服的业务案例。舰队软件的集成确保了最佳后勤效率,无论是管理一个单元还是车队。
用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。
用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。
利用机器人技术提高工作场所安全
机器操作、零件重新定位和拾取和放置:由工人进行的机器操作和零件重新定位涉及从工业机械中物理调整或移除生产零件或工具和材料——依靠屏幕和基本传感器来固定重型压制设备或快速旋转工具,以防止意外伤害。人类操作员有时会为了提高生产率或便利性而绕过此类安全机制,从而增加严重伤害和死亡的风险。通过用机械臂和 AMR 取代机器操作员,可以消除这些重复性和高风险的任务。

国际工业工程计算杂志
随着行业4.0继续改变制造业领域,重点是转向产品的大规模个性化,使公司能够有效地生产满足个人客户独特需求和偏好的定制商品。这要求制造业企业具有安排过程和制造设置的灵活性和适应性。可以通过利用无线组装系统(LAS)的概念来实现产品个性化的灵活性和随后实现产品的个性化,该概念用一个系统在机器之间移动的系统,将产品替换为自动驾驶机器人(AMR),将产品安装在机器上(AMR),将产品从一种机器转移到另一台机器上,就像其生产途径一样。这需要根据其可用AMR的生产路线进行调度产品以获得LA的好处,LAS被视为工作室调度问题(JSSP),以最大程度地利用资源利用率,同时遵守约束。这种方法的新颖性是,除了计划产品外,它还考虑了AMR的调度。在当前工作中介绍了解决确定性JSSP的数学公式。使用数学求解器为各种输入求解公式。通常,JSSP是NP硬性问题。随后,已经构建了基于元启发式的遗传算法(GA)来解决JSSP。比较了通过GA和数学求解器获得的解决方案,发现GA在计算和优化效率方面的性能很好。
用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。

用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。
用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。
用机器人技术改善工作场所安全
机器倾斜,零件重新定位和拾取位置:人工工人的机器趋势和零件重新定位涉及从工业机械中进行物理调整或删除生产零件或工具和材料 - 依靠屏幕和基本的传感器来固定繁重的压机设备或快速跨度的设备,以防止意外伤害。人类操作员有时绕过这种安全机制,以提高生产率或便利性,从而增加严重伤害和死亡的风险。通过用机器人的臂和AMR替换机器招标,可以消除这些重复和高风险的任务。