XiaoMi-AI文件搜索系统
World File Search SystemARCS

基于小型卫星星座的火星自主导航系统的设计和性能
破译火星极地冰盖的起源和演化,有助于我们更好地了解火星的气候系统,并将成为类地行星比较气候学的一大进步。随着科学界对火星高纬度地区探索的兴趣日益浓厚,以及需要尽量减少着陆器和探测车上的资源,这促使人们需要从轨道上获得足够的导航支持。在 ARES4SC 研究的背景下,我们提出了一个基于星座的新概念,该星座可以支持致力于对这些地区进行科学研究的不同类型用户的自主导航。我们研究了两个星座,它们的主要区别在于半长轴和轨道倾角,由 5 颗小型卫星组成(基于 Argotec 正在开发的 SmallSats 设计),专门覆盖火星极地地区。我们专注于卫星间链路 (ISL) 的架构,这是提供星历表和时间同步以广播导航信息的关键元素。我们的概念基于适当配置的相干链路,这种链路能够抑制星载时钟不稳定性的不利影响,并在星座节点之间提供出色的距离率精度。数据质量使两个星座在一个高度自主的系统下都能获得良好的定位性能。事实上,我们表明,通过采用 ISL 通信架构可以大大减少地面支持。通过主航天器(母航天器),星座节点上的时钟可以定期与地面时间 (TT) 同步,主航天器是星座中唯一能够与地球进行无线电通信的元素。我们报告了不同操作场景中的数值模拟结果,并表明可以使用批量顺序滤波器或具有重叠弧的批量滤波器为星座节点获得非常高质量的轨道重建,这些滤波器可以在母航天器上实施,从而实现高度的导航自主性。利用这一概念来评估可实现的定位精度对于评估未来定位系统覆盖红色星球的可行性至关重要。

用于评估热中子散射材料的高级建模和仿真方法∗
摘要。随着对高级反应堆,关键性安全性和屏蔽应用的热中子散射数据的兴趣,评估新材料或先前评估材料的重新评估(或验证)需要新的实验数据。在三步过程中评估了新的实验数据:(1)计算声子特征,(2)从数据中计算动态结构因子(DSF),以及(3)使用实验设置来模拟实验数据。所有三个步骤都面临着挑战,从需要一般通用的材料模拟代码(可以计算Correponding DSF的处理代码)到测量数据的仪器 /梁线 /设施的详细布局。可以使用各种方法(分子动力学,密度功能理论等)计算材料的声子特征。),DSF的高实现计算和基于DSF的实验模拟对于评估的准确性至关重要。可以通过使用橡树岭国家实验室的散布中子源(SNS)开发的两个相应的代码系统来实现后两个步骤:(1)Oclimax,该程序,该程序可以计算DFT和MD模拟结果的动态结构因子,以及(2)McVine,Monte Carlo Neutron Carlo Neutron Ray-Neutrats设计的模拟实验。最近,在SNS的宽角式切碎机(ARC)和红杉仪器站测量聚乙烯和Yttrium氢化物。使用密度函数理论代码,剑桥串行总能包(Castep)来模拟这些实验,以计算其声音特征(特征值 /矢量和pdos),然后使用oclimax对其进行处理以产生DSF,并通过对MCVine的数据进行数量的量度,从而对每个仪器站产生DSF,并在每个仪器站进行了量子。与常规评估方法进行比较,将从Oclimax处理的散射数据与NJOY LEAPR模块处理的散射数据进行了比较,并且McVine模拟的结果与先前使用的简化光束线模型进行了比较。

采用信念随机最优控制的稳健空间轨迹设计
步进轨迹通常经过优化以满足标准场景中的科学和飞行系统约束。然而,在实际应用中,完全遵循参考轨迹是不可能的,因为不确定性总是影响系统;不确定性可能是由于不完善的状态知识、不完善的动态参数、错过的推力事件或执行错误造成的。在设计阶段,通常通过导航分析事后评估参考轨迹对这些不确定性的稳健性和可靠性,并通过多次迭代调整标准设计。通过评估轨迹受到不同不确定性实现影响时的任务结果来进行稳健性和可靠性评估。为了提高稳健性,通过增加推进剂裕度和强制滑行弧进行轨迹校正机动 (TCM),或降低推力水平来确保对轨迹进行微小调整。因此,该迭代过程主要将标准轨迹优化视为与不确定性处理阶段分离。此过程通常很耗时,并且可能导致具有过于保守的裕度的次优轨迹。组件和发射器的最新发展现在使深空微型卫星和纳米卫星任务成为可能。此类航天器的轨道控制能力有限(DV 有限),状态知识(地面站访问有限)和执行(TRL 组件低)的不确定性很大,裕度和系统冗余的可能性低(尺寸和成本有限)。因此,对于这些任务,轨迹的设计更重要的是其对不确定性的稳健性。虽然不确定性下的轨迹优化是小型航天器的一种可行方法,但大型传统任务也将受益于随机轨迹优化,既可以提高性能,因为随机最优轨迹通常与具有经验裕度的确定性轨迹不同,也可以减少设计迭代次数。如上所述,目前主要的实际方法是分配后验经验裕度 [1,2]。最近的研究采用随机最优控制问题的不同公式生成了稳健轨迹。模型预测控制或随机闭环公式用于解释控制曲线中的校正项 [3,4]。通过随机规划研究了发动机暂时故障的情况 [5,6]。微分
ECDIS NX E05.01 - Raytheon Anschütz
图1:矢量海图示例 (ENC、DNC).....................................................................................................................5 图2:光栅海图示例 (BSB).............................................................................................................................5 图3:海军部光栅海图服务海图示例 (ARCS)............................................................................................. 6 图4:显示组织示例显示比例 16:10......................................................................................................... 8 图5:显示组织......................................................................................................................................... 9 图6:信息区显示比例 16:10 和 16:9.........................................................................................................10 图7:信息区显示比例 5:4.........................................................................................................................10 图8:海图信息区域................................................................................................................................13 图9:操作区域............................................................................................................................................... 17 图10:警报区域...............................................................................................................................................18 图11:对话框:登录......................................................................................................................................... 24 图12:对话框:登录......................................................................................................................................... 25 图13:对话框:ECDIS NX 帮助(主题).........................................................................................................26 图14:对话框:ECDIS NX 帮助(词汇表).........................................................................................................26 图15:对话框:ECDIS NX 帮助(主题).........................................................................................................27 图16:对话框:ECDIS NX 帮助(主题)......................................................................................................28 图20:普通模式与设置模式的比较(示例)......................................................................................30 图17:对话框:ECDIS NX 帮助(词汇表)....................................................................................................... 28 图18:对话框:通知......................................................................................................................................... 28 图19:对话框:关于......................................................................................................................................................... 29 图21:对话框:桥梁系统时间设置....................................................................................................................... 30 图22:对话框:轨迹控制选项.................................................................................................................... 31 图23:对话框:雷达覆盖选项.................................................................................................................... 32 图24:对话框:船舶中心选项..................................................................................................................... 33 图25:菜单:显示...................................................................................................................................... 34 图26:菜单:显示/船舶.........................................................................................................................................35 图27:菜单:显示......................................................................................................................................... 36 图28:菜单:显示/船舶;区域:本船选项......................................................................................................... 37 图29:菜单:显示......................................................................................................................................... 37 图30:菜单:显示/船舶;区域:LOOK-AHEAD(前视)...................................................................................... 38 图31:对话框:LOOK-AHEAD OPTIONS(前视选项)...................................................................................... 38 图32:菜单:DISPLAY(显示)......................................................................................................................... 39 图33:菜单:DISPLAY / SHIP(显示/船舶);区域:LOOK-AHEAD(前视)............................................................................. 39 图34:菜单:DISPLAY(显示)......................................................................................................................... 40 图35:菜单:显示/船舶;区域:过去轨迹...................................................................................................... 40 图36:对话框:过去轨迹选项...................................................................................................................... 41 图37:菜单:显示...................................................................................................................................... 41 图38:菜单:显示/船舶;区域:过去轨迹...................................................................................................... 42 图39:菜单:显示...................................................................................................................................... 43 图40:菜单:显示/船舶;区域:PAST TRACK(过去轨迹)...................................................................................... 43 图41:菜单:DISPLAY(显示)...................................................................................................................... 44 图42:菜单:DISPLAY / SHIP(显示/船舶);区域:过去轨迹................................................................................................................ 44 图43:菜单:显示 / 用户................................................................................................................................ 45 图44:对话框:用户和桥接配置文件.......................................................................................................45 图45:对话框:桥接配置文件....................................................................................................................47 图46:菜单:显示............................................................................................................................................. 48 图47:菜单:显示 / 用户............................................................................................................................. 48 图48:对话框:用户和桥接配置文件(配置文件名称).............................................................................49
终极骗局 - UCI 法
今年早些时候,俄罗斯从米格 31 战斗机腹部发射了其最新、最危险的武器。当高超音速“匕首”导弹点燃火箭发动机,以高达 5 马赫的速度飞向乌克兰的一个目标时,这标志着高超音速武器首次用于冲突。“匕首”和类似的导弹处于武器开发技术革命的顶峰。这些高超音速导弹的速度可以达到 10 马赫,但更重要的是它们非常灵活。现有的弹道导弹速度更快,在地球大气层以上飞行时速度可达 20 马赫,因为那里的阻力较小,不会减慢它们的速度。但要达到这些速度,弹道导弹必须像炮弹一样以预定的弧线飞行,这使得它们很容易被追踪和击落。下一代高超音速导弹可以低空飞行(低于 60,000 英尺),在飞行途中调整航向,并绕过导弹防御系统。军事分析人士称它们“势不可挡”。安全智库 RUSI 2021 年的一份报告的作者写道:“高超音速武器代表了自 [洲际弹道导弹] ICBM 以来导弹技术最重大的进步。”“[它们] 正在破坏核威慑态势,并在 2020 年代中期造成战略稳定裂痕。”俄罗斯已经在测试 Kinzhal 的继任者,它使用吸气式发动机,像喷气式飞机一样,以高达 9 马赫的速度飞行,这使得它更难被发现和防御。

在Cu上生长的石墨烯的补充材料结构(...
在1000 K处的参考文献[7]中合成了石墨烯。从表面制备实验室,荷兰获得Cu(111)样品,并以0.1°精度将其表面对齐(111)平面。将样品生长在附着在扫描隧道显微镜(STM)室的样品生长容器中。随后,将样品通过超高真空手提箱转移到正常的X射线立波(XSW)室。将样品保存在10-10 mbar压力范围内。图像1-4(表S2)和图S1-4均在同一样本上测量,并显示了XSW测量。使用单色的AlKαX射线源来评估溅射和退火过程后晶体的清洁度。STM和低能电子差异(LEED)测量表明Cu(111)晶体上的较大梯田。STM。沿Moir´e模式的高对称轴的多个STM图像采集了线条。对于每种情况,通过拟合正弦曲线提取了它们的周期性(P)以及最大值和最小值(∆ D)之间的明显高度差异。p和∆ d是通过沿着每个moir'e模式的高对称方向进行三条线扫描的平均来计算的(图S1-S5)。均方根位移值(RMS-D)是根据假设高度的正弦分布的每个STM Moir´e图像的平均波纹计算得出的。[8]。通过LEED确定铜方向(图这些RMS-D值可以转换为Debye-Waller因子(DWF),并在参考文献中的步骤后进一步转换为相干分数。表S2中总结了结果以及文献[9]的NC-AFM数据,为此,我们使用报告的∆ D以与我们自己的STM数据相同的方式来计算RMS-D和相干分数。s6),我们能够为图像1-4分配Moir´e和Cu晶格之间的角度,这在表S2中总结了。对于图像5(图S5)无法确定这个角度,因为该样品未获得低能电子差异(LEED)。参考。 [7]提出了与本研究相同的叠氮酮生长程序生长的石墨烯的LEED模式。 LEED数据显示了弧,这些弧以前归因于Cu(111)底物上的石墨烯的多个方向[10]。参考。[7]提出了与本研究相同的叠氮酮生长程序生长的石墨烯的LEED模式。LEED数据显示了弧,这些弧以前归因于Cu(111)底物上的石墨烯的多个方向[10]。
![b“极值图论的一个核心问题是确定给定图 H 在 \xef\xac\x81x 大小的图中诱导副本的最大数量。这个问题最早由 Pippenger 和 Golumbic [13] 研究,近年来已成为广泛研究的主题 [2, 3, 7, 8, 11, 18]。本文重点关注有向图的类似问题。准确地说,设 H 是有向图。有向图 G 中 H 的诱导密度,表示为 i ( H, G ),是 G 中 H 的诱导副本数量除以 | V ( G ) | | V ( H ) | 。对于整数 n ,设 i ( H, n ) 为所有 n 顶点有向图 G 中 i ( H, G ) 的最大值。H 的诱导性定义为为 i ( H ) = lim n \xe2\x86\x92\xe2\x88\x9e i ( H, n )。当 i ( H, n ) 对于 n \xe2\x89\xa5 2 递减时,此极限存在。只有极少数有向图的可诱导性是已知的。一类重要的例子是有向星号。对于非负整数 k 和 \xe2\x84\x93 ,让有向星号 S k,\xe2\x84\x93 为通过对具有 k + \xe2\x84\x93 叶子的星号的边进行有向图,使得中心具有出度 k 和入度 \xe2\x84\x93 。有向星形是所有边都具有相同方向的定向星形,即星形 S k,\xe2\x84\x93 ,使得 k = 0 或 \xe2\x84\x93 = 0。S 2 , 0 和 S 3 , 0 的可诱导性由 Falgas-Ravry 和 Vaughan [5] 确定。为了解决 [5] 中的一个猜想,Huang [10] 扩展了他们的结果,确定了对所有 k \xe2\x89\xa5 2 的 S k, 0 的可诱导性,表明它是通过对入度为 0 的部分进行不平衡的弧爆破而渐近获得的。注意,由于任何有向图的可诱导性等于通过反转所有弧得到的有向图的可诱导性,因此可以考虑有向星号 S k,\xe2\x84\x93 ,使得 k \xe2\x89\xa5 \xe2\x84\x93 。特别地,Huang 的结果还确定了对所有 \xe2\x84\x93 的 S 0 ,\xe2\x84\x93 的可诱导性。 [10] 的结果未涵盖的最小定向星是 S 1 , 1 ,即三个顶点上的有向路径。Thomass\xc2\xb4e [16,猜想 6.32] 猜想 i ( S 1 , 1 ) = 2 / 5,这是通过四个顶点上的有向环的迭代爆炸获得的。](/simg/b\ba28460dd1b06d9996628290aa73355077ae7e14.webp)
b“极值图论的一个核心问题是确定给定图 H 在 \xef\xac\x81x 大小的图中诱导副本的最大数量。这个问题最早由 Pippenger 和 Golumbic [13] 研究,近年来已成为广泛研究的主题 [2, 3, 7, 8, 11, 18]。本文重点关注有向图的类似问题。准确地说,设 H 是有向图。有向图 G 中 H 的诱导密度,表示为 i ( H, G ),是 G 中 H 的诱导副本数量除以 | V ( G ) | | V ( H ) | 。对于整数 n ,设 i ( H, n ) 为所有 n 顶点有向图 G 中 i ( H, G ) 的最大值。H 的诱导性定义为为 i ( H ) = lim n \xe2\x86\x92\xe2\x88\x9e i ( H, n )。当 i ( H, n ) 对于 n \xe2\x89\xa5 2 递减时,此极限存在。只有极少数有向图的可诱导性是已知的。一类重要的例子是有向星号。对于非负整数 k 和 \xe2\x84\x93 ,让有向星号 S k,\xe2\x84\x93 为通过对具有 k + \xe2\x84\x93 叶子的星号的边进行有向图,使得中心具有出度 k 和入度 \xe2\x84\x93 。有向星形是所有边都具有相同方向的定向星形,即星形 S k,\xe2\x84\x93 ,使得 k = 0 或 \xe2\x84\x93 = 0。S 2 , 0 和 S 3 , 0 的可诱导性由 Falgas-Ravry 和 Vaughan [5] 确定。为了解决 [5] 中的一个猜想,Huang [10] 扩展了他们的结果,确定了对所有 k \xe2\x89\xa5 2 的 S k, 0 的可诱导性,表明它是通过对入度为 0 的部分进行不平衡的弧爆破而渐近获得的。注意,由于任何有向图的可诱导性等于通过反转所有弧得到的有向图的可诱导性,因此可以考虑有向星号 S k,\xe2\x84\x93 ,使得 k \xe2\x89\xa5 \xe2\x84\x93 。特别地,Huang 的结果还确定了对所有 \xe2\x84\x93 的 S 0 ,\xe2\x84\x93 的可诱导性。 [10] 的结果未涵盖的最小定向星是 S 1 , 1 ,即三个顶点上的有向路径。Thomass\xc2\xb4e [16,猜想 6.32] 猜想 i ( S 1 , 1 ) = 2 / 5,这是通过四个顶点上的有向环的迭代爆炸获得的。
b“极值图论的一个核心问题是确定给定图 H 在 \xef\xac\x81x 大小的图中诱导副本的最大数量。这个问题最早由 Pippenger 和 Golumbic [13] 研究,近年来已成为广泛研究的主题 [2, 3, 7, 8, 11, 18]。本文重点关注有向图的类似问题。准确地说,设 H 是有向图。有向图 G 中 H 的诱导密度,表示为 i ( H, G ),是 G 中 H 的诱导副本数量除以 | V ( G ) | | V ( H ) | 。对于整数 n ,设 i ( H, n ) 为所有 n 顶点有向图 G 中 i ( H, G ) 的最大值。H 的诱导性定义为为 i ( H ) = lim n \xe2\x86\x92\xe2\x88\x9e i ( H, n )。当 i ( H, n ) 对于 n \xe2\x89\xa5 2 递减时,此极限存在。只有极少数有向图的可诱导性是已知的。一类重要的例子是有向星号。对于非负整数 k 和 \xe2\x84\x93 ,让有向星号 S k,\xe2\x84\x93 为通过对具有 k + \xe2\x84\x93 叶子的星号的边进行有向图,使得中心具有出度 k 和入度 \xe2\x84\x93 。有向星形是所有边都具有相同方向的定向星形,即星形 S k,\xe2\x84\x93 ,使得 k = 0 或 \xe2\x84\x93 = 0。S 2 , 0 和 S 3 , 0 的可诱导性由 Falgas-Ravry 和 Vaughan [5] 确定。为了解决 [5] 中的一个猜想,Huang [10] 扩展了他们的结果,确定了对所有 k \xe2\x89\xa5 2 的 S k, 0 的可诱导性,表明它是通过对入度为 0 的部分进行不平衡的弧爆破而渐近获得的。注意,由于任何有向图的可诱导性等于通过反转所有弧得到的有向图的可诱导性,因此可以考虑有向星号 S k,\xe2\x84\x93 ,使得 k \xe2\x89\xa5 \xe2\x84\x93 。特别地,Huang 的结果还确定了对所有 \xe2\x84\x93 的 S 0 ,\xe2\x84\x93 的可诱导性。 [10] 的结果未涵盖的最小定向星是 S 1 , 1 ,即三个顶点上的有向路径。Thomass\xc2\xb4e [16,猜想 6.32] 猜想 i ( S 1 , 1 ) = 2 / 5,这是通过四个顶点上的有向环的迭代爆炸获得的。
保存您的视线:关于您的老化眼睛的7件事
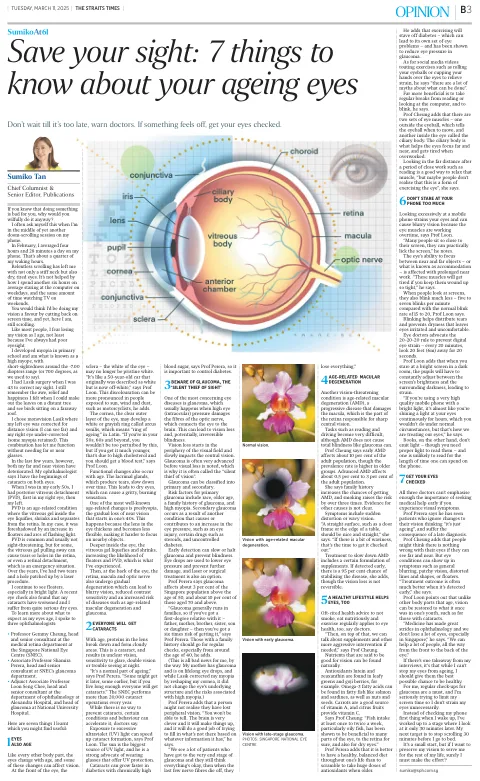
如果您知道做事G对您有害,为什么您还是会愿意地做到这一点?我经常在手机上的另一个厄运滚动课程中间进行时,经常问自己。2月,我每天在M Y电话上平均四个小时28分钟。那大约是我醒来的四分之一。无情的滚动使我不仅脖子僵硬,而且又干燥,疲倦的眼睛。我在平均盯着电脑O o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o o的持续时间和周末看电视的时间相同。您会认为我会通过缩短n个屏幕时间来帮助我的愿景,但是,在这里,我仍在滚动。像大多数人一样,我害怕随着年龄的增长而失去视力,尤其是因为我的视力一直很差。我在小学上发展了近视,并且被称为高毛,在-7.00乔布斯山脉(或我们以前说的700度)左右短。我43岁时接受了Lasik手术,以纠正我的视力。我仍然记得当我可以在遥远的树上弄出叶子,看到鸟儿坐在遥远的屋顶上时,我感到敬畏,欣慰和幸福。我选择了Monovision lasik,在那里我的左眼得到了远距离视觉的纠正(我可以看到),右眼被校正不足(某些近视保留)。这种组合使我发挥作用,而无需远处或靠近眼镜。在过去的几年中,我的遥远和近视都在恶化。我的眼科医生说,两只眼睛上都有白内障的开始。就我而言,它是由于闪光灯的浮动器和弧的增加而预示了它。当我50多岁的时候,我的玻璃体后脱离(PVD)首先在右眼,然后是左眼。PVD是一种与年龄相关的条件,在此疾病中,眼睛液体内的玻璃体凝胶与视网膜分离并分离。PVD很常见,通常不会威胁视力,但是对于某些人来说,玻璃体凝胶会引起视网膜的眼泪或孔,甚至是视网膜脱离,这是紧急情况。多年来,我有两只眼泪和一个用激光程序修补的洞。我继续看到漂浮物,尤其是在明亮的光线下。最近的眼睛检查还发现我的白内障恶化,我的眼睛很严重。要了解有关我的眼睛年龄期望的更多信息,我与三位眼科医生交谈:

C-130H - 空军杂志
2014 年 12 月 1 日,当地时间大约 20:22,一架隶属于北卡罗来纳州波普陆军机场 (AAF) 第 440 空运联队的 C-130H,尾号 (T/N) 88-4404 和一架隶属于北卡罗来纳州波普陆军机场美国陆军特种作战司令部飞行连的美国陆军 C-27J,T/N 10-27030 在北卡罗来纳州麦考尔陆军机场以南约 8 英里处相撞。两架飞机均宣布紧急降落,C-27 安全降落在麦考尔陆军机场,C-130 安全降落在波普陆军机场。八名 C-130 机组人员和五名 C-27 机组人员均未受伤。C-27 的损失估算仍在进行中。政府因 C-130 和相关清理工作而遭受的损失估计为 1,837,649.93 美元。事故发生时,失事的 C-130 正在执行逃生机动,在完成目视集装箱运输系统空投后离开吕宋空投区 (DZ)。失事的 C-27 正从劳林堡-马克斯顿机场起飞,前往两个航路点 DZ 进行模拟空投。C-130 以 193 度航向在 1500 英尺平均海平面 (MSL) 处平飞,而 C-27 以 1500 英尺平均海平面处平飞,航向约为 310 度,从左到右从 C-130 下方略微飞过。C-27 的右翼尖在前起落架舱门处擦过 C-130 的右下侧,损坏了起落架舱门,并沿着一条路径将照明弹分配器罩从机身撕下,然后继续飞入 C-130 的右翼下方。C-27 垂直稳定器立即穿过

基于学生的感觉运动反应分析Ivan Bocharin 1,Maxim Guryanov
Original Article Individualization of martial arts training based on sensorimotor reaction analysis in students IVAN BOCHARIN 1 , MAXIM GURYANOV 2 , ANTON VOROZHEIKIN 3 , VIKTOR KRAYNIK 4 , ELENA ROMANOVA 5 , LARISA RYZHKOVA 6 , ALEXANDER BOLOTIN 7 , ATANAS SARANDEV 8 , NINA ARNST 9 , IVAN DAVIDENKO 10 , MAXIM Anisimov 11,Pavel Tyupa 12,Andrey Kovalchuk 13 1,2 Priverolzhsky Research医科大学,Nizhny Novgorod,俄罗斯,俄罗斯3 Kaliningrad研究所,俄罗斯Kaliningrad,俄罗斯4 Altai State Pagogigical University,Barnaul,Barnaul,Barnaul,Barnaul,Barnaul,Barnaul,俄罗斯5 Altai State,5 Altai State,Russia,Russiia,Moscia presia presia presia presia sport'ussia sport'ussia sport'russiia大圣彼得堡理工大学,俄罗斯圣彼得堡8医科大学 - 索非亚,索非亚,保加利亚9 Reshetnev西伯利亚州科学技术大学,克拉斯诺亚尔斯克,俄罗斯,俄罗斯10,11圣彼得堡州立农业大学,俄罗斯圣彼得斯堡,俄罗斯圣彼得斯,俄罗斯12号Immanuel Kant kant baltic University,俄罗斯,Kalinia,Kalinia,Kalinia,Kalining,Yugra,13岁,俄罗斯的Khanty-Mansiysk,在线发布:2024年6月30日,接受出版:2024年6月15日doi:10.7752/jpes.2024.06155摘要:神经过程的移动性和不稳定性,以及通过Reflex Arcs的激发式传播的速度来确定各个人的效力,并确定了一个人的有效性。这项研究的目的是对武术中从事不同形式的体育活动的学生运动员之间对物体进行复杂的视觉 - 运动反应进行比较分析,以实现个性化教育和培训课程。研究使用了对移动物体的反应方法。结论。材料和方法:五十七名男学生参加了实验,其中包括32名没有特定运动训练的32名,在Sambo和Aikido类别中具有25种体育经验。使用的设备是带有集成的“心理生理学”软件的“ TVE”视觉运动反应控制台。评估了准确,高级和延迟反应的数量,平均反应时间以及神经过程的平衡。结果:具有运动经验的学生显示了中枢神经系统的功能更稳定,以及神经过程的移动性和不稳定性,这通过研究指标的可靠值证实。在测试过程中,学生运动员表现出精确反应的占主导地位,激发和抑制作用的变化更加稳定。与未经训练小组的学生相比,他们沿着反射弧的激发速度更高。没有运动经验的学生之间的聚类分析结果表明神经过程的不稳定性,而兴奋或抑制过程占主导地位。在学生运动员组中,神经过程更加平衡,这可能会对运动结果产生积极影响。关键词:体育,武术,视觉运动反应,体育训练在体育和运动实践中,人类中枢神经系统生理状态的关键信息预测之一是视觉运动的反应。这决定了训练过程的个性化方法的重要性(Romanova等,2023; Wang等,2023)。可用于确定脑皮质中激发和抑制的特征,以及沿反射弧的神经信号的速度(Van Biesen等,2018; Trecroci等,2021;Hülsdünker,&Mierau,&Mierau,2021)。研究感觉运动反应的速度和准确性对于确定中枢神经系统功能状态的心理生理特征和参数至关重要。已经确定,身体的这种生理功能是影响运动训练质量的主要特征之一(Hunzinger等,2020)。对移动对象的视觉运动响应是预见教育,培训和竞争活动中事件过程的研究过程中最著名的。实现武术的运动结果(伊斯兰等,2020; Korobeynikov等,2020; Vorozheikin等,2020)。