XiaoMi-AI文件搜索系统
World File Search SystemAbelson
[休假2025年,...Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...](/simg/f\f6b05e5f34a4956214b8b37bd3a6ce5e3897696f.webp)
Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...
从视觉,触觉和音频等原始感官观察(即感觉运动学习)中学习进行决策的学习;机器人学习的特殊动力;深入的强化学习;深度学习;物体操纵;机器人运动;导航;基于模型的控制;模仿学习;逆增强学习;机器人手的设计;软机器人技术;使用自然语言将常识知识整合到机器学习系统中;自学学习;计算机视觉;多模式表示从视觉,触摸和音频学习;了解人类活动;人类机器人相互作用;机器学习在医疗保健中的应用;人类认知;计算神经科学。总体研究目标是建立允许代理/机器人通过探索和进行实验不断学习世界的机制。一个应用区是家庭中的机器人,但不限于它。

理性行动理论背景下的中文房间论证
大约四十年前(1980 年),美国哲学家约翰·塞尔在他的论文《思想、大脑和程序》(Searle:1980)中发表了他对他所谓的强人工智能(人工智能)论题的著名驳斥,塞尔声称“经过适当编程的计算机确实具有认知状态,程序因此可以解释人类认知”(Searle:1980,417)。正如他所写,塞尔的论文的直接收件人是 R. Shank 和 R. Abelson 的研究(Shank,Abelson:1977,248),他们的作者声称他们设法创建了一个能够理解人类故事含义的计算机程序。例如,关于一个故事:“一个人去一家餐馆点了一个汉堡包;当汉堡包送来时发现它被烧焦了,这个人愤愤不平地离开了餐馆,没有付钱。”问题是:“他吃了汉堡包吗?”“适当”编程的计算机回答很可能没有。在他的文章中,Searle 既没有分析 Shank 和 Abelson 使用的测试计算机的程序,也没有分析他们程序的运行原理。他提出了一个问题,当计算机没有相应的视觉、嗅觉和味觉体验时,是否可能谈论理解,因为计算机无法知道“汉堡包”、“烧焦”等词的含义。正如 Searle 所相信的,Shank 和 Abelson 进行的人工智能研究遵循了 A. Turing 众所周知的测试范式,根据该测试,计算机对“人类答案”的令人满意的模仿与人的合理答案相似。在图灵测试中,扮演专家角色的人以硬拷贝格式提出问题,并以同样的方式从两个他看不见的对话者那里得到答案,其中一个是人,另一个是专门编程的计算机。根据图灵的说法,令人满意地通过测试的标准是,专家在五分钟的调查后,在不超过 70% 的情况下识别出计算机(图灵:1950,441),图灵认为这可以相信计算机具有思考能力。
转向AI的未来:预期治理策略
最后,作者感谢所有在整个报告中为该报告做出贡献的人。其中包括Jerry Sheehan,Audrey Plonk,Hanna-Mari Kilpelainen,Alessandra Colecchia,David Winickoff,Laura Kreiling,Jamie Berryhill,Douglas K.R.Robinson,Gallia Daor和Julia Carro(科学,技术与创新局);丽贝卡·金(Rebecca King)(公共治理局); Barbara Bijelic和Rashad Abelson(金融和企业事务局); Rafal Kierzenkowski,Dexter Docherty和Hamish Hobbs(经合组织战略远见单元)提供了宝贵的评论和指导。 作者要感谢Andreia Furtado,John Tarver和Sarah Ferguson的编辑支持。 本报告的整体质量从参与度中受益匪浅。Robinson,Gallia Daor和Julia Carro(科学,技术与创新局);丽贝卡·金(Rebecca King)(公共治理局); Barbara Bijelic和Rashad Abelson(金融和企业事务局); Rafal Kierzenkowski,Dexter Docherty和Hamish Hobbs(经合组织战略远见单元)提供了宝贵的评论和指导。作者要感谢Andreia Furtado,John Tarver和Sarah Ferguson的编辑支持。本报告的整体质量从参与度中受益匪浅。

逃离中文房间
涂鸦配对规则等同于专家系统中常用的 IF-THEN 规则或“产生式”。一些内部涂鸦比较可以等同于自然语言处理中的人工智能工作者所称的脚本——例如,RC Schank 和 RP Abelson (1977) 描述的餐厅脚本。在这种情况下,Searle-in-the-room 的纸张传递性能基本上可以与“问答”Schankian 文本分析程序的性能相媲美。但“问答”不是问答。Searle-in-the-room 并没有真正回答问题。他怎么能回答问题呢,因为他无法理解这些问题?练习没有帮助(除了可能使涂鸦配对更快):如果 Searle-in-the-room 逃脱了,他将像刚被锁在里面时一样不懂中文。
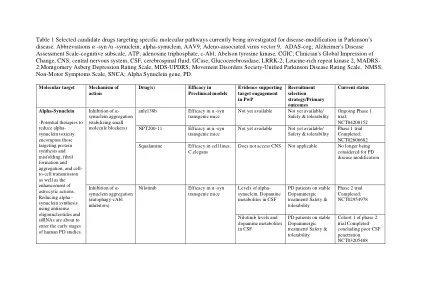
表1针对目前正在研究帕金森氏病疾病的特定分子途径的选定候选药物。
表1针对目前正在研究帕金森氏病疾病的特定分子途径的选定候选药物。缩写α -syn /α-苏核蛋白; Alpha-synclein,AAV9;腺相关病毒载体9,ADAS-COG;阿尔茨海默氏病评估量表 - 认知子量表,ATP;三磷酸腺苷,C-ABL; Abelson酪氨酸激酶,CGIC;临床医生对变革的全球印象,中枢神经系统;中枢神经系统,CSF;脑脊液,GCASE;葡萄糖脑苷酶,LRRK-2;富含亮氨酸的重复激酶2,Madrs-2; Montgomery Asberg抑郁级评级量表,MDS-UPDRS;运动障碍社会统一的帕金森病评级量表,NMS;非运动症状量表,SNCA; α突触核蛋白基因,pd。
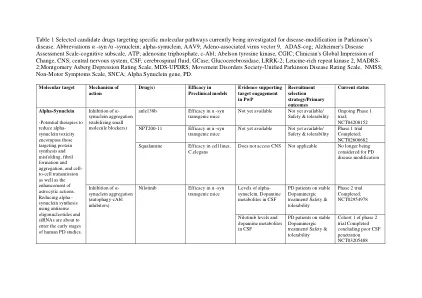
表 1 目前正在研究针对特定分子通路治疗帕金森病的候选药物。
表 1 目前正在研究用于治疗帕金森病的特定分子通路的候选药物。缩写 α -syn /α -突触核蛋白;alpha-突触核蛋白,AAV9;腺相关病毒载体 9,ADAS-cog;阿尔茨海默病评估量表-认知分量表,ATP;三磷酸腺苷,c-Abl;阿贝尔森酪氨酸激酶,CGIC;临床医生对变化的总体印象,CNS;中枢神经系统,CSF;脑脊液,GCase;葡萄糖脑苷脂酶,LRRK-2;富含亮氨酸重复激酶 2,MADRS-2;蒙哥马利阿斯伯格抑郁量表,MDS-UPDRS;运动障碍协会统一帕金森病评定量表,NMSS;非运动症状量表,SNCA; Alpha Synnuclein 基因,PD。
人工智能
人工智能的建设始终充满争议,不仅关于它的局限性,而且关于其追求的目标。对人工智能 (AI) 的研究似乎有两种根本不同的风格:一方面是经验风格,这种风格受到对生物的生物学和心理学观察的强烈支持,并准备接受由许多不同模块的相互作用而产生的复杂架构;另一方面,分析风格受到一般和组织原则的支持,对抽象的智力概念感兴趣,并受到数学和逻辑论证的支持。 1980 年左右,人们创造了“邋遢”和“整洁”两个词来分别指代这两种工作风格。 Robert P. Abelson (1981) 显然是第一份讨论这两个术语的出版物,他将这种区别归因于一位未具名但根据 Abelson 的说法很容易识别的同事——根据文献,此人应该是 Roger Schank (Nilsson, 2009)。邋遢 和 整洁 这两个词并不完全是褒义词。从某些方面来看,每个术语都特别适合一个球队用来对抗另一个球队。邋遢的人衣冠不整,迷失在令人困惑的复杂系统中。新人很古板,只在象牙塔里进行理论研究,与现实世界的细节脱节。阿贝尔森在人类的许多活动、艺术、政治、科学中都发现了这些普遍态度。有些人喜欢通过实验获得的结果,而并不关心解决方案是否偏离预先设定的惯例,而另一些人则在广泛的理论中寻求秩序和和谐。在其他领域也可以找到类似的论点:例如,Sergiovanni (2007) 讨论了管理教育中的邋遢与整洁的观点,并将它们与一种理解该职业的方式联系起来。在过去的几十年中,AI文献中反复讨论了 disheveled 和 prim 之间的区别,但并不总是统一的。有时,第一种立场只是简单地表明愿意处理高度复杂的系统;从这个意义上说,人工智能几乎不可避免地会变得混乱,因为没有人想象智能

潜在治疗方法与已获批准或正在研发的慢性粒细胞白血病治疗方法
慢性粒细胞白血病 (CML) 是由 t (9;22) (q34; q11) 相互易位引起的,导致断点簇区域 ( BCR ) 和 Abelson 白血病 ( ABL1 ) 基因融合 ( 1 )。由此产生的 BCR-ABL 融合蛋白是一种高活性酪氨酸激酶。靶向治疗主要基于使用酪氨酸激酶抑制剂 (TKI),该药物可以抑制该融合蛋白的活性 ( 1 )。目前,CML 的年发病率为每 100,000 人 0.7 至 1.0 例,随着年龄的增长而增加,男性发病率高于女性,比例为 1.2-1.7 ( 2 )。CML 发生在慢性期 (CML-CP),与髓系细胞大量扩增有关。获得 BCR-ABL1 基因突变和/或表观遗传改变会导致疾病进展至晚期,被归类为加速期 (CML-AP) 或急变期 (CML-BP) ( 3 )。
生物多样性、自然资本和经济:
本文件由经合组织环境司和贸易与农业司编写。英国作为 2021 年 G7 主席国,要求编写本文件以帮助为 G7 财政、经济和环境部讨论提供信息。报告由 Edward Perry、Geraldine Ang、William Symes、Katia Karousakis 和 Simon Buckle 编写,由 Simon Buckle 和 Julia Nielson 领导。作者衷心感谢 OECD 同事提供的意见和反馈,即 Rashad Abelson、Shivani Kannabhiran、Coralie Martin、Rob Patalano、Stephanie Venuti (DAF)、Juan Casado Asensio (DCD)、Myriam Linster、Mariana Mirabile、Miguel Cardenas Rodriguez、Deepika Sehdev (ENV)、Andrew Blazey、Klas Klaas、Andrew Park、 Piotr Stryszowski (GOV)、Roberto Astolfi、Peter van de Ven (SDD)、Jonathan Brooks、Guillaume Gruère 和 Evdokia Moïsé (TAD)。

金融领域的生成人工智能
作者非常感谢以下个人和组织提供的宝贵意见和反馈:波兰国家银行的 Adam Głogowski 和 Pawel Gasiorowski;国家银行委员会 (CONSOB) 的 Daniela Gariboldi;意大利银行的 Giuseppe Grande;希腊银行的 Eleftheria Kostika;瑞士国家银行的 Benjamin Müller、Laura Felber 和 Lucas Marc Fuhrer;斯洛文尼亚银行的 Borut Poljšak;美国财政部的 Paull Randt、Peter Grills 和 Rohan Paris;芬兰银行的 Tatu Rasanen;墨西哥银行的 María Antonieta Campa Rojas;爱尔兰财政部的 Mai Santamaria、Jefferson Vieira 和 Mark Curran;奥地利财政部的 Angelika Schlögel 和 Kamran Kazemzadeh 以及奥地利国民银行的 Vanessa Redak;荷兰银行的 Gibran Watfe 和 Hans Brits;以及经合组织的 Antonio Gomes、Karine Perset、Luis Aranda、Rashad Abelson、Barbara Bijelic、Greta Gabbarini、Seohyun Kim 和 Masayoshi Chida。