XiaoMi-AI文件搜索系统
World File Search SystemAdapta
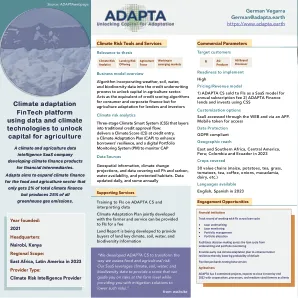
解锁社会和环境影响
Financial Institutions Track record of working with FIs across loan cycle: • Loan underwriting • Loan monitoring • Portfolio management • Portfolio allocation Facilitates decision-making across the loan cycle from underwriting and portfolio monitoring Provides early risk climate adaptation plan to enhance farmer resilience thereby lowering probability of default Five Kenyan banks testing beta version Agribusiness ADAPTA has 3 committed projects, expects to close 4在2022年末,与客户一起,与合作社,处理器和中型农民一起

方案和适应更改的替代方案
图1- RCP和扩展浓度途径的总RF(更自然的人为)) - 对于RCP2.6,RCP4.5,RCP6和RCP8.5,以及互补的延长RCP6.5,以及在2100后调整后的互补延伸RCP6.5,以达到RCP4.5浓度水平为2250 RCP4.5浓度水平。RF的短期变化是由于过去的火山力(1800-2000)和太阳周期,假设太阳周期为11年(遵循CMIP5的建议),除了稳定时间(Cubasch等人,2013年)。
在测试和考试中应用改编的指南-JNE 2024
1。pursed改编 - 以负担得起的格式说出来.........................................................................................................................................................................................................................................................................................................................................................................................................................................................................Braille ............................................................................................................................................ 11 1.2.Formato Digital ........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... 12 1.3。Ampliação em formato A3 ............................................................................................................ 13 1.4.Identificação de exames a enviar para classificação .................................................................... 13 2.p在学校的基础教义和次要教义的级别上。Procedures for the preparation of tests at school level .................................................. 15 3. P ROVA DE PORTUGUÊS LÍNGUA SEGUNDA ( PL 2)................................................................................................ 17 3.1. 存在葡萄牙语的手势解释器...................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................... Portuguese Language Dictionary Consultation ........................................................................................................... Alunos de PLNM e adaptações ........................................................................................................... 19 5. 在阅读障碍或Procedures for the preparation of tests at school level .................................................. 15 3.P ROVA DE PORTUGUÊS LÍNGUA SEGUNDA ( PL 2)................................................................................................ 17 3.1.存在葡萄牙语的手势解释器......................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................Portuguese Language Dictionary Consultation ...........................................................................................................Portuguese Language Dictionary Consultation ...........................................................................................................Alunos de PLNM e adaptações ........................................................................................................... 19 5.对外部评估过程的划分A DAPTAÇÃO DO ESPAÇO / MATERIAL ............................................................................................................... 20 5.1.sit in a different place from the call agenda sequence .............................................. 20 5.3. Use ergonomic equipment .......................................................................... 20 6. ACOMPANHAMENTO POR UM DOCENTE.............................................................................................. 20 6.1. Leitura de enunciados ......................................................................................................................... 21 6.2. transcriçãoderespostas ................................................................................................................................................................................................................................................................. 22 6.3。 Ditar as respostas ............................................................................................................................... 22 6.4. Assistance in the handling of authorized material for each test or exam ................................. 23 7.sit in a different place from the call agenda sequence .............................................. 20 5.3. Use ergonomic equipment .......................................................................... 20 6. ACOMPANHAMENTO POR UM DOCENTE.............................................................................................. 20 6.1. Leitura de enunciados ......................................................................................................................... 21 6.2. transcriçãoderespostas ................................................................................................................................................................................................................................................................. 22 6.3。 Ditar as respostas ............................................................................................................................... 22 6.4. Assistance in the handling of authorized material for each test or exam ................................. 23 7.sit in a different place from the call agenda sequence .............................................. 20 5.3. Use ergonomic equipment .......................................................................... 20 6. ACOMPANHAMENTO POR UM DOCENTE.............................................................................................. 20 6.1. Leitura de enunciados ......................................................................................................................... 21 6.2. transcriçãoderespostas ................................................................................................................................................................................................................................................................. 22 6.3。 Ditar as respostas ............................................................................................................................... 22 6.4. Assistance in the handling of authorized material for each test or exam ................................. 23 7.sit in a different place from the call agenda sequence .............................................. 20 5.3.Use ergonomic equipment .......................................................................... 20 6. ACOMPANHAMENTO POR UM DOCENTE.............................................................................................. 20 6.1. Leitura de enunciados ......................................................................................................................... 21 6.2. transcriçãoderespostas ................................................................................................................................................................................................................................................................. 22 6.3。 Ditar as respostas ............................................................................................................................... 22 6.4. Assistance in the handling of authorized material for each test or exam ................................. 23 7.Use ergonomic equipment .......................................................................... 20 6.ACOMPANHAMENTO POR UM DOCENTE.............................................................................................. 20 6.1.Leitura de enunciados ......................................................................................................................... 21 6.2.transcriçãoderespostas ................................................................................................................................................................................................................................................................. 22 6.3。Ditar as respostas ............................................................................................................................... 22 6.4.Assistance in the handling of authorized material for each test or exam ................................. 23 7.Assistance in the handling of authorized material for each test or exam ................................. 23 7.
一起行动:通信工具包
的重点包括与气候Acɵon,Wopke Hoekstra专员的独家交流,以及针对包容性转移的小组讨论和突破性会议,与气候变化,青年活动和AIIntegraɵon的Adaptaɵon。不要错过气候的村庄,展示了来自气候条约社区的Impacƞuleuiniɵaɵves和Cuƫng-Edge的项目!
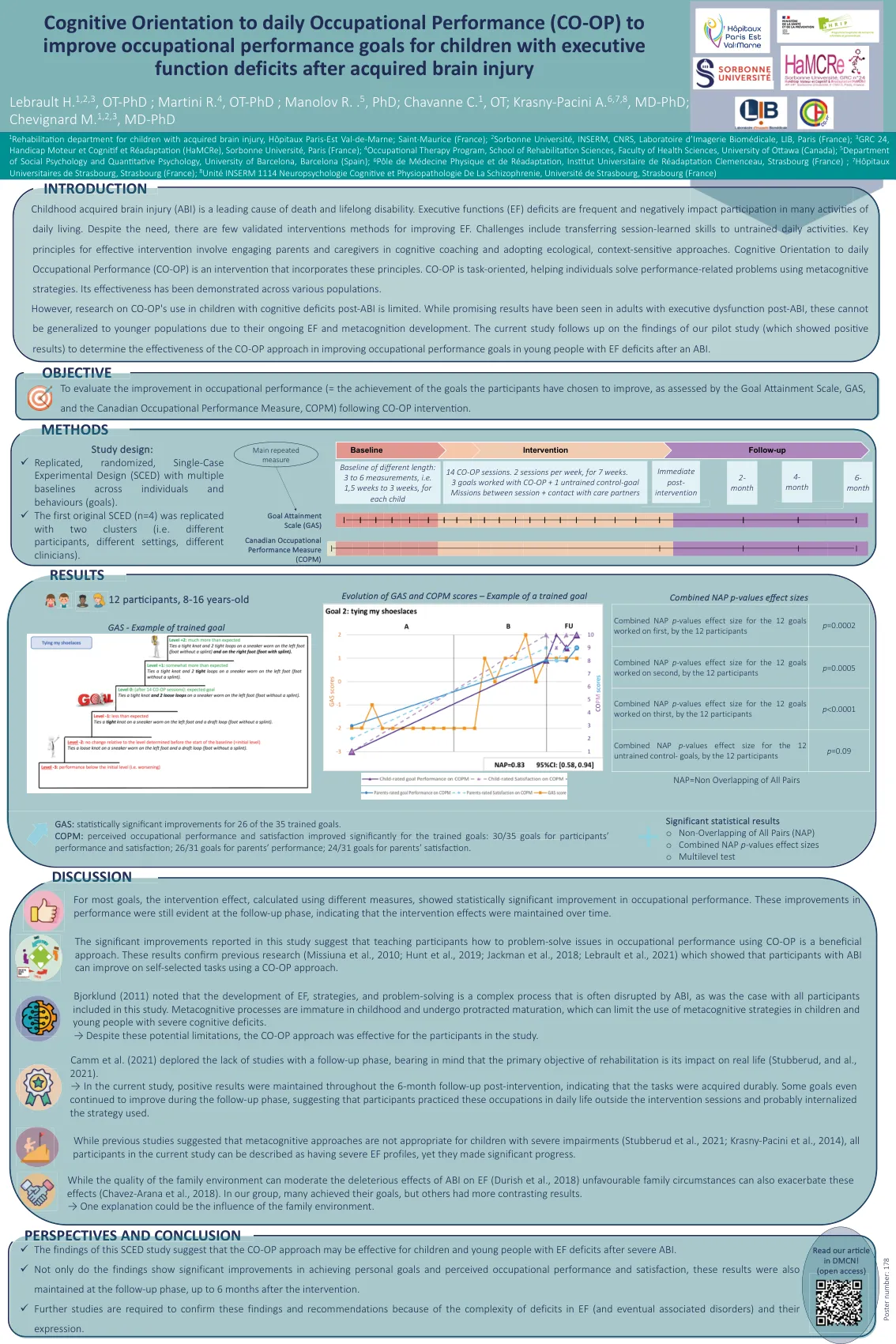
日常职业表现的认知导向(...
1 巴黎东部马恩河谷地区医院儿童脑损伤康复科;圣莫里斯(法国); 2 索邦大学、法国国家健康与医学研究院、法国巴黎国立科学研究院、生物医学成像实验室、LIB(法国); 3 GRC 24,运动和认知障碍及康复(HaMCRe),巴黎索邦大学(法国); 4 奥瓦多大学健康科学学院康复科学学院职业治疗项目(加拿大); 5 巴塞罗那大学社会心理学和量化心理学系,巴塞罗那(西班牙); 6 斯特拉斯堡克莱蒙梭大学康复研究所物理医学与康复中心(法国); 7 斯特拉斯堡大学医院,斯特拉斯堡(法国); 8 法国斯特拉斯堡大学 INSERM 1114 精神分裂症认知神经心理学和病理生理学研究组
有氧运动和阻力运动对心血管系统的影响
https://orcid.org/0000-0003-1181-6411 马拉尼昂联邦大学 (UFMA),巴西圣路易斯 心血管运动适应实验室 - LACORE (UFMA),巴西圣路易斯 圣卢西亚学院教授 - 圣伊内斯 - MA 阿菲亚医学院教授 -MA 巴西心脏病学会 SBC-AMB 正式会员 心肾体育锻炼适应实验室 - LACE
打开人工智能预测的黑匣子......
人类的决策。本论文依靠可解释的人工智能,通过使用几种最先进的不可知方法的改良,使心跳分类变得易于理解。为了解释时间序列分类器,提出了一种初步的分类法,并使用导数作为

(由GEF独立评估办公室准备)
1。全球环境设施(GEF)是一个由186个成员国的基金家族,致力于面对生物多样性损失,气候变化,Polluɵon和土地和海洋健康的压力。其赠款,融合融合和政策支持帮助发展中国家解决其最大的先验环境,并遵守国际环境召集。在过去的三十年中,GEF提供了超过230亿美元的资金,并为超过5,000个Naɵonal和区域项目提供了1290亿美元的合作。对Adaptaɵon中间的支持主要是通过最不发达国家基金(LDCF)和特殊气候变化基金(SCCF)完成的。气候信息和预警系统(CIEWS),并且是2022 - 2026年LDCF和SCCF策略中的四个优先主题之一。在全球范围内,人们对Ciews的重要意义越来越多,这已成为气候变化的组成部分。与灾难风险降低和管理相结合时,Ciews的扩张表明,在降低了受灾难的影响的地区降低死亡率方面具有e依。ciews在减少气候变化影响和增强气候变化弹性的脆弱性方面起着至关重要的作用。此外,对Ciews的投资始终揭示出强大的利益,以富于成本的利益,不仅展示了他们的潜力,不仅可以保护生命,还可以保护宝贵的资产。
心律管理
Adapta® Attesta™ Claria MRI™ Evera™ Relia™ Sphera™ AdaptivCRT™ Azure™ Cobalt™ InSync® Reveal LINQ™ Sprint Fidelis® Advisa DR MRI® Brava™ Compia MRI™ LINQ II™ Revo MRI® Sprint Quattro® Advisa® CapSure Sense® Concerto® Maximo® Secura® SureScan™ Amplia MRI™ CapSure® Consulta® Micra™ Secure® Syncra® Astra™ CapSureFix Novus™ Crome™ Mirro MRI™ SelectSecure® Transvene 心房导线位置检查™ CapSureFix® EffectivCRT™ MVP® Sensia® TruRhythm™ Attain Ability® Capture Management® Egida™ MyCareLink Heart™ Sensing Assurance Versa® Attain Performa™ Cardia™ Encore™ Percepta™ Serena™ Virtuoso® Attain Prevail® CareAlert™ EnRhythm MRI™ Primo MRI™ Sigma Visia AF MRI™ Attain Stability™ CareLink Express™ EnRhythm® Protecta® SmartSync™ Viva™ Attain StarFix® CareLink™ Ensura MRI™ Quick Look™ Solara™ Wavelet™