XiaoMi-AI文件搜索系统
World File Search SystemAvoidance
空中防撞 - 迈诺特空军基地
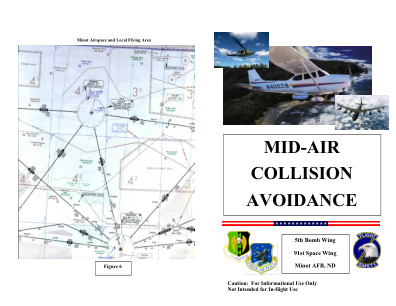
迈诺特空军基地位于 83 号公路旁,这是北达科他州的主要南北公路之一。这条公路也是穿越该州中部的空中交通的飞行路线。空军基地周围有许多小型机场(见图 6,注意:本手册中的图表摘录自分区图和国防部仪表进近图,仅供参考。它们不适用于飞行中。),其中大多数飞行都使用目视飞行规则 (VFR)。为了帮助飞机安全分离,迈诺特进近管制中心在当地飞行区域提供飞行跟踪。图 2、3 和 4 描绘了迈诺特空军基地附近军用飞机通常使用的飞行路径。特别重要的是位于迈诺特 D 级空域内的区域(见比林斯分区图)。在飞越距机场 5.2 海里以内的 2500 英尺高程 (或 4168 英尺平均海平面) 以下的该区域之前,所有飞行员都必须联系迈诺特空军基地控制塔,并在指定空域内飞行时与其保持无线电联系。

使用基于 AI 的避障技术实现无人机安全着陆
摘要 — 随着第四次工业革命的进行,许多关于无人机的研究工作已经积极开展。目前,无人机技术最重要的部分之一是飞行过程中障碍物的自主识别和避障。通常情况下,无人机依靠 GPS 信号按照飞行前指定的航路点飞行。然而,当无人机接近指定着陆点时,可能会出现障碍物和不可预见的物体,这些障碍物和物体可能会严重危及无人机的安全着陆。因此,无人机的安全着陆成为一个非常重要的问题。在这方面,本研究探讨了将人工智能 (AI) 技术应用于无人机的可能性,以提高安全性。通过将图像传感器、支持 AI 的物体识别和无人机飞行控制计算机集成在一起,无人机可以更安全地着陆,而不必担心在飞行着陆阶段因意外障碍物而翻倒或严重损坏。 索引术语 — 着陆平台跟踪、避障、图像分割、人工智能、二维坐标、飞行控制
空中防撞 - 戴维斯-蒙森空军基地
第 355 战斗机联队空中防撞 (MACA) 计划的目标是促进南亚利桑那州的安全飞行环境。所提供的信息旨在提供对当地军事飞行行动的基本了解,定义标准的戴维斯-蒙森 (DM) 出发和到达走廊,并强调使用频繁的当地军事训练空域。所提供的信息并不涵盖所有 DM 或南亚利桑那州军事飞行行动。请联系第 355 联队飞行安全办公室获取更多信息,或者如果您希望安排针对您组织的简报会。如果您有疑问或想表达任何空域问题,请致电我们。
车载防撞警告系统 - ROSA P
本文件是根据合同 DTNH22-91 C-07004“车载防撞警告系统:人为因素考虑”执行的工作的最终报告。该项目旨在制定车载防撞警告界面设计的指南,并开始填补定义过程中暴露的一些数据空白。它的目标不是设计某种特定的设备或系统。相反,它具有更一般的视角,即确定一系列潜在设备的共同问题,支持多种类型设备之间的集成和兼容性,并促进给定警告情况下替代产品之间的兼容性。为了支持这些目标,该项目进行了批判性分析,制定了初步指南,并对选定的问题进行了新的实证研究。

高度自动化汽车中的避障 - 南特 - LS2N
方法来协助驾驶员控制车辆。目前,该方法正在考虑用于制定手动和自动驾驶模式之间平稳过渡的策略。本文有两个目标。首先,它提出采用现有的触觉共享控制策略来实现手动和自动驾驶模式之间的转换,并在驾驶模拟器上对真实驾驶员评估这种方法。其次,它提出在避障环境中评估四种不同的过渡曲线。第一个曲线是从自动驾驶模式逐渐过渡到共享控制模式,然后在越过障碍物后从共享控制模式再次过渡到自动驾驶模式。第二个曲线是从自动驾驶模式逐渐过渡到手动模式。第三个曲线是从自动驾驶模式到手动模式的二元过渡。最后,在第四种条件下,驾驶员超越自动驾驶模式。这些过渡曲线在驾驶模拟器上以曲线和直线进行评估。结果首先验证了使用触觉共享控制策略来执行手动和自动驾驶模式之间的转换。自动化系统和驾驶员提供的扭矩分配与预期共享水平的进展相对应。其次,无论是在转向性能还是主观评价方面,渐进式过渡都比二元过渡和自动驾驶模式的覆盖更具优势。
无人地面车辆的传感器融合和避障
本论文 - 开放获取由 Scholarly Commons 免费提供给您,供您开放获取。它已被 Scholarly Commons 的授权管理员接受并纳入学位论文和论文。如需更多信息,请联系 commons@erau.edu 。
机载防撞系统 (ACAS) 手册 - ICAO
前言 本手册由监视和冲突解决系统小组 (SCRSP)(现称为航空监视小组 (ASP))制定。2005 年 6 月 2 日,空中航行委员会批准了 SCRSP 第一次会议关于出版本手册的建议 1/2,该手册是有关机载防撞系统 (ACAS) 各种技术和操作方面的信息汇编。本手册中包含的材料是对附件 10 — 航空电信第 IV 卷 — 监视雷达和防撞系统、空中航行服务程序 — 空中交通管理(PANS-ATM,Doc 4444)和空中航行服务程序 — 航空器运行(PANS-OPS,Doc 8168)中包含的 ACAS 标准和建议措施 (SARPs) 和程序的补充。本手册提供的指南包括对 ACAS 及相关技术和操作问题的详细描述,以便于正确操作和操作监控以及人员培训。与其他手册一样,本文件将在必要时进行修订。在这方面,欢迎各国和其他与 ACAS 有关的各方提出意见。此类意见应寄至:国际民用航空组织秘书长 999 University Street Montréal, Quebec Canada H3C 5H7 _________________________________
英国国家北海鳕鱼回避计划
TAC设置为2020年。实际关闭时间(RTC)和实时报告(RTR)将有助于管理车队的配额问题。该计划主要集中于空间措施,以避免捕获丰富的鳕鱼。尽管很难量化空间措施,但我们先前使用RTC(尤其是在COD恢复计划中)的空间措施的经验表明,这种措施对COD死亡率和生物量有可见的影响。1。产卵封闭北海北海 - 英国与欧盟成员国和挪威一起工作,建立了十个产卵的关闭,该关闭在2020年1月1日生效并留在原地。北海南部的关闭 - 在英国水域的部分中,有两个产卵封闭。其他站点可以被视为在英国水域中关闭季节性产卵的候选者,并且确定的任何站点都将在本计划中建立并进行更新。1.1产卵方案的功能
遵守缓解措施的指导 3.20 避免考古资源
1) 如果您选择使用高分辨率调查数据进行评估,请根据《给承租人和经营人的通知》(NTL)第 2005-G07 号,使用足以提供 100% 侧扫声纳覆盖海底的线间距,在所有计划进行海底扰动活动的区域获取数据。例如,如果您计划的作业水深超过 400 米,并且您决定将井位或相关锚点移动最多 500 英尺(如 NTL 第 2009-G27 号所述),请确保调查覆盖的区域足够大,以解释这种变化。此外,可以使用之前收集的侧扫声纳数据,前提是它是使用 DGPS 定位收集的,并且具有足够的分辨率和质量,可供合格的海洋考古学家准确解释。如果使用多个数据集,则必须将所有数据合成为综合考古评估。 2) 如果您选择使用 ROV 调查进行评估,ROV 应配备声学定位和扇区扫描声纳。视频、声纳和导航都应录制到 DVD 中,以供查看。如果您打算在获得场地许可认证后立即开展已获批准的活动,则专业的海洋考古学家应在调查进行过程中观察调查情况,观察方式可以是亲自到场或通过远程互联网馈送,该馈送的质量和分辨率足以让考古学家进行分析。此外,考古学家必须能够与 ROV 驾驶员实时通信,以指导调查。如果发生视频或通信中断,则应在视频或通信恢复时从中断发生的位置继续调查。如果考古学家未能亲自到场从 ROV 控制室观察调查,他/她应在考古评估报告中通过审查记录的导航、声纳和视频文件证明调查已完成,项目区域得到充分覆盖,潜在目标未被忽略。3) 如果您提议拆除的结构位于之前未调查过的区块内,或者您的调查未涵盖拟议行动的所有影响,例如场地清理拖网、驳船锚、锚链、钢丝绳、电缆等,请使用常规调查仪器(即磁力计、侧扫声纳、海底剖面仪,数字记录并绑定到 DGPS 或其他相称的导航系统)在足够大的区域进行调查,以涵盖所有拟议的海底扰动活动。在水深超过 200 米(656 英尺)的地方,不需要使用磁力计。如果无法使用常规仪器,可以使用自主水下航行器 (AUV) 或深水拖曳系统获取这些数据。NTL 2005-GO7 提供了有关特定仪器的指导(http://www.boem.gov/Regulations/Notices-To-Lessees/2005/05-G07.aspx)。
安全法规组 CAP 371 避免疲劳...
在每个飞行值班期开始时得到充分休息,并在飞行过程中保持足够的无疲劳状态,以便在所有正常和异常情况下都能以令人满意的效率和安全性飞行。航空器运营人应了解计划飞行值班期与休息时间和休假时间的频率和模式之间的关系,并充分考虑长时间工作与最低休息时间的累积影响。2.2 计划的时刻表必须允许在允许的飞行值班期内完成航班。民航局在评估时刻表的制定时,将考虑飞行前值班、滑行、飞行和周转时间所允许的时间。然而,我们认识到计划的航班有时会出现不可预见的延误。在这些情况下,航空器机长可以在规定的条件下延长 FDP。