XiaoMi-AI文件搜索系统
World File Search SystemBuoy

声纳浮标:一种改进的设计方法
摘要:提出了一种改进微处理器控制声纳浮标系统性能的设计方法,用于监视水下物体。当微处理器控制的浮标发射到海中或海洋中时,它开始自动扫描水下物体,以提取物体信息并通过无线方式将其传输到远程地面站进行进一步处理并采取最终控制措施。本文介绍了采用 11 单元副本相关的声纳浮标系统设计大纲,从而提高了系统性能。虽然使用最近的数字延迟线可以最大限度地降低硬件副本相关器的复杂性,但所提出的微处理器控制浮标通过软件执行副本相关并提取物体信息,从而提高了系统性能。

开发用于确定弹道导弹撞击点的全球定位系统/声纳浮标系统
应答器声纳浮标导弹撞击定位系统 (DOT I SMILS),利用由任务支援飞机投放的几种类型的声纳浮标。典型的声纳浮标直径为 4.5 英寸,长度不到 36 英寸。当浮标从飞机上自由落体时,一个小型阻力降落伞会展开,并稳定浮标坠入水中。撞击时,降落伞会释放,天线会竖起。在某些浮标中,天线位于小气球(浮子)组件中,该组件由声纳浮标中压力瓶中的气体充气。气球为浮标提供额外的浮力,并保护天线免受盐雾侵害。在气球充气的同时,浮标会释放一个水听器组件,该组件下降到大约 30 英尺的深度。水听器拾取其他浮标产生的声学信号和每次再入飞行器撞击的声音,并通过甚高频无线电链路将该信息传输到上空盘旋的任务支援飞机。阵列中的某些浮标部署了第二个水听器,将声学应答器命令信号注入水中。图 1 所示的导弹撞击定位系统中使用了各种类型的浮标。测速浮标测量水中的声速,而深海温度计浮标测量温度
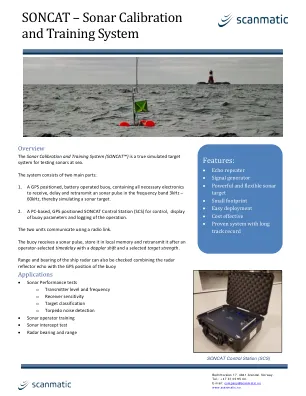
SONCAT – 声纳校准和训练系统
概述 声纳校准和训练系统 (SONCAT™) 是用于测试海上声纳的真实模拟目标系统。该系统由两个主要部分组成: 1. GPS 定位、电池供电的浮标,包含所有必要的电子设备,用于接收、延迟和重新发送 3kHz – 60kHz 频段的声纳脉冲,从而模拟声纳目标。 2. 基于 PC、GPS 定位的 SONCAT 控制站 (SCS),用于控制、显示浮标参数和记录操作。两个单元使用无线电链路进行通信。浮标接收声纳脉冲,将其存储在本地内存中,并在操作员选择的延时后以多普勒频移和选定的目标强度重新发送。还可以结合雷达反射器回波和浮标的 GPS 位置来检查船舶雷达的距离和方位

采用多重方法优化波浪能转换器...
摘要 — 世界海洋蕴藏着巨大的能量,是一种很有前途的可再生能源。波浪能转换器 (WEC) 是一种正在开发的技术,可以高效、经济地从海洋中提取能量。WEC 的主要组件包括浮标、电机、储能系统和与陆上电网的连接。由于吸收海浪中的能量是一个复杂的流体动力学过程,因此必须使用动力输出 (PTO) 机制将浮标的机械运动转换为可用的电能。这种转换可以通过使用齿条齿轮系统将浮标的线速度转换为用于转动电机的转速来完成。为了从海浪中提取最多的能量,必须在电机上安装控制器,使浮标与海浪的频率产生共振。对于不规则的波浪气候,可以使用多共振控制器与波浪频谱产生共振并优化 WEC 的功率输出。索引词——波浪能转换器、能量捕获、多谐振控制、可再生能源
课程计划5A(仰泳)
将决斗踢在后面成对的学生,一种面向一种方式,一个面向相反的方式,将面条放在两对之间,将面条固定在末端附近。两个学生都将面条固定在肚子上,并漂浮在背面。在命令上,学生开始在背部踢腿。当他们踢时,他们应该旋转一个圆圈。旅行并踢在后面两个宽度仰泳。用拉浮标在胸部/腹部上踢浮标的两个宽度。两个宽度不踢浮动设备,双臂并排。仅左臂两个宽度(将浮标拉在右臂下)。仅两个宽度右臂(将浮标拉在左臂下方)。完全中风仰泳。完全中风仰泳。

8730-035 雇主设定项目范例
https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.researchgate.net%2Ffigure%2FLayout-of- Masudas-navigation-buoy-based-on-10-On-the-right-hand-side-details- of_fig1_281307478&psig=AOvVaw3SxDnTm6sc5hqJZ mUdYEU&ust=1709807453875000&source=images& cd=vfe&opi=89978449&ved=0CBEQj xqFwoTCMje0qG334QDFQAAAAAdAAAAABAD 上图是一个简单的水上浮标,展示了水上浮标的基本结构和机制。水上浮标必须为柱形,根据简介,浮标的高度必须在海面以上 1400 毫米至 1800 毫米之间,直径为 500 毫米,高度可以用肉眼看到并配有照明,这符合 2011 年 9 月发布的 BS ISO 20712-1:2008 标准。该标准于 2019 年更新为 BS ISO 7010:2019 图形符号 - 安全颜色和安全标志。浮子组件浮子组件提供特定的浮力水平,如果它排出的体积合适,密度正确,包括整个浮标的质量。简介指出浮标必须易于固定,浮动组件必须由易于固定且高度坚固的材料制成。浮动组件的例子包括 (HDPE) ope 浮子由压缩成型的聚氯乙烯 (PVC) 制成。一些浮子可以由硬质聚苯乙烯(PS 泡沫塑料)、FKM 橡胶和 VMQ 橡胶制成,如果用空气(特别是氮气)充气以帮助漂浮。
任务创意_roboboat 2025.pptx
ASV进入一个固定舱,并观察灯面板。 灯面板将变为绿色,表明ASV通过门浮标,在蓝色标记浮标周围进行操纵,并尽快通过同一门浮标退出。 ASV进入一个固定舱,并观察灯面板。 Lig HT面板将变为绿色,表明ASV通过门浮标,在蓝色标记浮标周围操纵,并尽快从同一门浮标出口。ASV进入一个固定舱,并观察灯面板。灯面板将变为绿色,表明ASV通过门浮标,在蓝色标记浮标周围进行操纵,并尽快通过同一门浮标退出。ASV进入一个固定舱,并观察灯面板。 Lig HT面板将变为绿色,表明ASV通过门浮标,在蓝色标记浮标周围操纵,并尽快从同一门浮标出口。ASV进入一个固定舱,并观察灯面板。Lig HT面板将变为绿色,表明ASV通过门浮标,在蓝色标记浮标周围操纵,并尽快从同一门浮标出口。

自由浮动浮标声纳定位系统
海水中近表面声速 3'4 (1483 m s-r) 到频率计数器。门控周期由射频询问脉冲和声纳返回信号之间的持续时间设置。反射的声纳信号不会影响距离测量,因为它们的传播时间更长。 一对接收换能器安装在特殊形状的黄铜浮标下方,重 4 公斤 [图 3(a)],并通过一段尼龙绳悬挂在海面以下约 4 米处(图I )为浮标位置的三角测量计算提供了基线。通过比较换能器悬挂点之间的测量分离与换能器分离的声纳距离测量,确定此布置的基线稳定性在 * 0.I m 以内。在典型的实验情况下,即前后基线为 15 米,距离应答浮标 200 米,接收传感器的信噪比为 30 dB,通过三角测量计算和位置数据的统计处理,浮标位置可以在 * 0.5 米的精度范围内确定(第III B 节)。
自由浮动浮标声纳定位系统
将海水中近表面声速3'4 (1483 m s-r) 发送到频率计数器。门周期由射频询问脉冲和声纳返回信号之间的持续时间设置。反射的声纳信号由于传播时间较长,不会影响距离测量。一对接收换能器安装在重 4 千克的特殊形状的黄铜浮标下方 [图 3(a)],并通过一段尼龙绳悬挂在海面以下约 4 米处(图 1),为浮标位置的三角测量计算提供了基线。通过比较换能器悬挂点之间测得的分离度与换能器分离的声纳距离测量值,确定此布置的基线稳定性在 * 0.1 m 以内。在典型的实验情况下,即前后基线为 15 米,到应答浮标的范围为 200 米,接收传感器的信噪比为 30 dB,通过三角测量计算和位置数据的统计处理,可以在 * 0.5 米的精度范围内确定浮标位置(第 III B 节)。

阿尔夫海姆的 4D 海底声纳使用情况
在现场安装期间,必须将转塔拉入配合锥体。船只通过四艘拖船进行动态定位,并使用拖船管理系统进行定位。拉入由安装在 Alvheim 船上的绞盘执行,绳索穿过浮标。当船只因波浪和拖船定位等原因而移动时,重要的是实时监控转塔顶部以决定何时可以拉入。在规划阶段,人们对如此靠近 FPSO 船体的超短基线 (USBL) 跟踪系统的稳健性表示担忧。对 USBL 系统性能的担忧是由于浮标顶部 (±6m) 与船体非常接近。这可能导致船体反射产生杂散信号。此外,USBL 收发器位于 FPSO 附近的遥控车辆 (ROV) 上。因此,我们决定研究其他方法来定位浮标顶部相对于配合锥的位置,以防 USBL 不准确或 ROV 与 FPSO 上的定位团队之间的连接失败。图 2 显示了 Alvheim FPSO 和浮标,其中转塔位于配合锥内。