XiaoMi-AI文件搜索系统
World File Search SystemC6
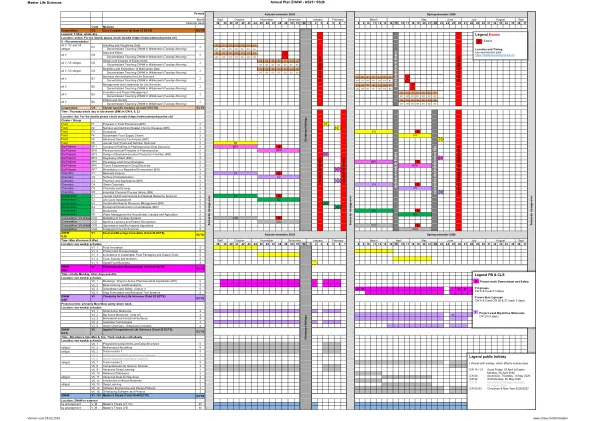
年度计划2025-2026
位置:TBA。有关详细信息,请检查Moodle(https://mslscommunitycentre.ch/)群集/集团食品F1食品加工中的进展(BW)3 F1食品F2 F2营养与营养相关慢性疾病(BW)3 F2食物F3食品F3食品F3食品F3食品3 E食品F4食品F4可持续食品供应F5食品F5食品F5食品F5杂货3(BW 5)杂志(BW 5)F5 F5(BW 5)科学“药物发现中的3 BBP1化合物分析3 e Bio/Pharma BP8药物中的物理化学原理3 BIO/PHARMA BP3生物制药生产设施(BW)3 bp3 BP3 BP3 BP3 BP4 BP4监管事务(BW)3 BP4 BIO/PHARMAPIY BORAPIES/PHARMAPIY BP5 EXISA BP5 exii bp5 exii bp5 exii bp5 exii bp5 e BP6 Tissue Engineering for Drug Discovery 3 Bio/Pharma BP7 Bioanalytics in a Regulated Environment (BW) 3 BP7 Chemistry C1 Materials Science 3 E Chemistry C2 Surface Characterisation 3 Chemistry C3 Polymers and Applications (BW) 3 C3 Chemistry C4 Green Chemistry 3 E Chemistry C5 Chemistry and Energy 3 Chemistry C6 Industrial Chemical Process Safety (BW) 3 C6 Environment E1 Journal Club Environmental and Natural Resource科学3 E环境E2生命周期评估3环境E3可持续自然资源管理(BW)3 E3环境E4景观中的生态基础架构(BW)3 E4环境E5生物多样性3 E环境E6环境E6家庭和农业的水管理,行业和农业3计算3计算,V5 OUMIG CORITION和COMPLIG CORITION 3 E COLIGIT CORITION 3 E CORPITINCT COM INCOL CORITION 3计算机3计算机3计算机3计算机3计算机3计算机3计算,计算机3计算生物启发的算法3 E计算生命科学的CO4成像3 Zhaw Ilgi
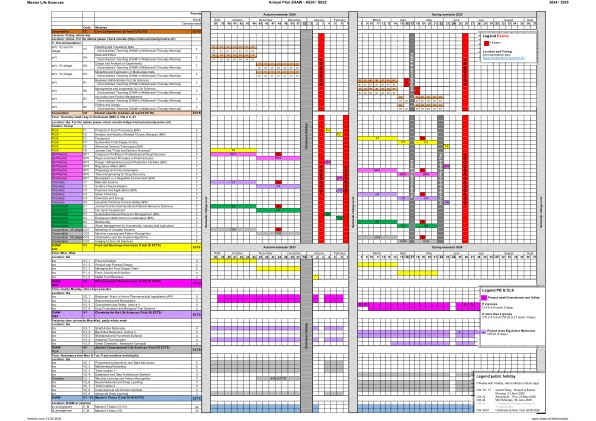
MSLS年度计划2024
位置:TBA。有关详细信息,请检查Moodle(https://mslscommunitycentre.ch/)群集/集团食品F1食品加工中的进展(BW)3 F1食品F2 F2营养与营养相关慢性疾病(BW)3 F2食物F3食品F3食品F3食品F3食品3 E食品F4食品F4可持续食品供应F5食品F5食品F5食品F5杂货3(BW 5)杂志(BW 5)F5 F5(BW 5)科学“药物发现中的3 BBP1化合物分析3 e Bio/Pharma BP8药物中的物理化学原理3 BIO/PHARMA BP3生物制药生产设施(BW)3 bp3 BP3 BP3 BP3 BP4 BP4监管事务(BW)3 BP4 BIO/PHARMAPIY BORAPIES/PHARMAPIY BP5 EXISA BP5 exii bp5 exii bp5 exii bp5 exii bp5 e BP6 Tissue Engineering for Drug Discovery 3 Bio/Pharma BP7 Bioanalytics in a Regulated Environment (BW) 3 BP7 Chemistry C1 Materials Science 3 E Chemistry C2 Surface Characterisation 3 Chemistry C3 Polymers and Applications (BW) 3 C3 Chemistry C4 Green Chemistry 3 E Chemistry C5 Chemistry and Energy 3 Chemistry C6 Industrial Chemical Process Safety (BW) 3 C6 Environment E1 Journal Club Environmental and Natural Resource科学3 E环境E2生命周期评估3环境E3可持续自然资源管理(BW)3 E3环境E4景观中的生态基础架构(BW)3 E4环境E5生物多样性3 E环境E6环境E6家庭和农业水管理,工业和农业3计算3计算,V5 Optig Coble COMED COMITINID 3 E COMPITITION 3 E COMPITITION 3 E COMPITITION 3 E COMPITITION 3 E COMPITITION 3 E COMPITITION 3计算机3计算机3计算机3计算机3计算机3计算机3计算机3计算机3计算生物启发的算法3 E计算生命科学的CO4成像3 Zhaw Ilgi V1食品和饮料创新(总计20位)ECTS

GHG排放报告2023
与Axess相关的范围3类别为:•C1:购买的商品和服务 - 设备,钢材材料和其他。•C4:上游运输 - 将购买的货物运输到Axess。•C5:在运营中产生的废物 - 我们所有的办公室和仓库。•C6:商务旅行 - 航班和酒店。•C7:员工通勤 - 员工从家里到办公室和返回。•C8:租赁资产 - 在办公设施中使用的电力和租赁车辆的排放。•C9:下游运输 - 设备的动员和运输(从Axess到客户)。•C11:使用已出售产品 - Axess产品运行中的排放。•C12:销售产品的临终治疗 - 处置Axess的产品。•C13:下游租赁资产 - 租赁产品运行的排放。

弱耦合状态下的里德伯原子纠缠
量子纠缠是量子力学最奇特、最有趣的性质之一 [1],它在理解量子多体系统的物理[2-4]以及支持各种量子应用(如量子计算[5]、量子传感[6]和量子通信[7])方面发挥着重要作用。目前,人们对量子纠缠的产生、操纵和检测有着浓厚的兴趣,正在许多物理系统中进行研究,包括光子[8]、原子[9-12]、离子[13],以及超导电路[14]和缺陷钻石[15]等固态系统。然而,在大多数系统中,即使是操作小型量子计算机,纠缠技巧也需要进一步改进。任意量子比特对的纠缠,尤其是不在附近的量子比特对的纠缠,对于具有良好连通性的可扩展量子系统尤为重要。尽管已经通过共模运动在囚禁离子中 [16,17] 和通过腔总线在超导电路中 [18] 实现了纠缠,但在大多数其他系统中还未能实现,包括与本文特别相关的里德堡原子系统。广泛使用的里德堡原子系统纠缠方案 [9-12] 是基于里德堡阻塞效应 [19] ,该效应禁止在阻塞半径 rb = ðC6 =ΩÞ1 =6 (由拉比频率Ω 和范德华相互作用强度 C6 定义) 内的原子之间发生双激发到里德堡能态。因此,在该方案 (参考文献 [19] 的模型 B) 中,所有且只有 rb 内的原子对同时纠缠,使这些纠缠成为短程纠缠 (d < rb)。在本文中,我们通过实验证明了弱耦合状态下的原子对纠缠(d>rb),这与文献 [19] 中的模型 A 密切相关。借助该模型,即使在存在较近的原子而不必纠缠的情况下,也可以在里德堡阻塞距离之外实现长距离原子纠缠。在弱耦合状态下,两个原子的双激发里德堡态相隔一个

支持在线材料
附加晶体学数据表。S1. 从 SCXRD 获得的 1D-Cu 4 I 8 ( Hdabco ) 4 晶体学数据。化合物 1D-Cu 4 I 8 ( Hdabco ) 4 经验公式 C6 H13 Cu2 I4 N2 分子量 861.07 温度 298 K 波长 0.71073 晶系 正交晶系 空间群 Pnma 晶胞尺寸 a = 13.6210(5) Å α = 90.0° b = 10.0312(3) Å β = 90.0° c = 15.5034(6) Å γ = 90.0° 体积 2118.31(13) Å 3 Z 4 密度 2.700 Mg/m 3 吸收系数 7.839 mm -1 F(000) 1584.0 Theta (最大) 27.490° h, k, lmax 17, 13, 20 收集的反射数2564 完整性至 θ = 31.444° 0.998 吸收校正 MULTI-SCAN 最大和最小透射 0.574 和 0.625 R 1 0.0362 wR 2 0.0791
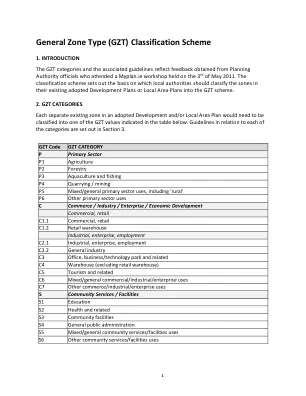
通用区域类型(GZT)分类方案-MyPlan.ie
GZT Code GZT CATEGORY P Primary Sector P1 Agriculture P2 Forestry P3 Aquaculture and fishing P4 Quarrying / mining P5 Mixed/general primary sector uses, including ‘rural' P6 Other primary sector uses C Commerce / Industry / Enterprise / Economic Development Commercial, retail C1.1 Commercial, retail C1.2 Retail warehouse Industrial, enterprise, employment C2.1 Industrial, enterprise, employment C2.2通用行业C3办公室,商业/技术公园及相关C4仓库(不包括零售仓库)C5旅游及相关C6混合/通用商业/工业/企业/企业用途C7其他商业/工业/企业/企业使用S社区服务/设施S1教育S2健康及相关S3社区设施S3 Community STACOINIT

o r i g i n a l r e s a r c h有效的抗脱脂瘤通过脑靶向的RVG15修饰的脂质体加载紫杉醇 - 胆固醇>
背景:神经胶质瘤是最常见的原发性恶性脑肿瘤,具有可怕的总体生存和高死亡率。临床治疗中最困难的挑战之一是,大多数药物几乎不会穿过血脑屏障(BBB)并在肿瘤部位实现有效的积累。因此,为了避免这一障碍,开发有效穿越BBB药物递送纳米壳的临床重要性非常重要。狂犬病病毒糖蛋白(RVG)是一种衍生肽,可以特异性结合与烟碱乙酰胆碱受体(NACHR)在BBB和胶质瘤细胞上广泛表达,以使狂犬病病毒入侵大脑。受到这一点的启发,RVG已被证明可以增强整个BBB的药物,促进渗透性,并进一步增强药物肿瘤的选择性和穿透性。方法:在这里,我们使用了从众所周知的RVG29进行重新分组的RVG15,以开发针对脑靶向的脂质体(RVG15-LIPO),以增强BBB的透气性和paclitaxel(PTX)的肿瘤特异性递送。制备紫杉醇 - 胆固醇复合物(PTX-CHO),然后积极地加载到脂质体中以获得高夹层效率(EE)和良好的稳定性。同时,对物理化学特性,体外和体内递送效率和治疗效应进行了彻底研究。结果:PTX-CHO-RVG15-LIPO的粒径和ZETA电位分别为128.15±1.63 nm和-15.55±0.78 mV。与游离PTX相比,PTX-CHO-RVG15-LIPO在HBMEC和C6细胞中表现出极好的靶向效率和安全性,并且在BBB的体外模型中的运输效率更好。此外,PTX-CHO-RVG15-LIPO可以明显改善PTX在大脑中的积累,然后根据基于体内成像分析的C6 Luc Orthotopic Glioma中的化学治疗药物渗透。体内抗肿瘤结果表明,PTX-CHO-RVG15-LIPO显着抑制了神经胶质瘤的生长和Metabasis,因此提高了具有不利影响的肿瘤小鼠的存活率。结论:我们的研究表明,由于BBB渗透和肿瘤靶向能力,RVG15是一种有前途的脑靶向特定配体。基于体外和体内出色的治疗效果,PTX-CHO-RVG15-LIPO被证明是PTX治疗临床上神经胶质瘤的潜在输送系统。关键字:神经胶质瘤,血液 - 脑屏障,RVG15,脂质体,紫杉醇

第三循环
•会议C1:中亚地下水管理中的水 - 能源 - 食品Nexus的方法•会议C2:开源和访问相等和可持续的能源食品 - 水 - 水nexus•会议•会议c3:非洲镜头上的水源性食品中的镜头:源自水的复杂性•解决城市复杂性•解决城市c4:圆桌会议的综合效果,以供源于水的饮食效果,促进了水平的水平和较高的饮水效果,并逐渐发展效果,促进型号的饮食范围,又有挑战,挑战,挑战,挑战,挑战: Of The Philippines • Session C5 ⮾ : Using a Theory of Change to foster impact of WEF+ Nexus projects: practical insights [Workshop] • Session C6 : Water-energy-food nexus and systems modelling to secure a sustainable and maximizing resource self-sufficiency at the local scale • Combined session C7/C8: Leveraging Innovative WEF Nexus technologies and approaches for Climate Action • Session C9 : Building Nexus韧性:解决水能系统中的迁移和冲突[面板讨论]•会议C10⮾:WEF+ Nexus的最佳实践:展示有影响力的项目[面板讨论和讲习班]

新墨西哥州航天港管理局现状简报
• SpinLaunch 首次动能发射测试 • Virgin Galactic 两次太空飞行 • C6 Launch 和 Ursa Major 测试液体火箭发动机 • Intuitive Machines 测试用于月球的激光辅助着陆系统 • Swift Engineering 进行高空伪卫星 (HAPS) 飞行 • UP Aerospace 以 LANL 为客户进行太空飞行 • AeroVironment Jump 20 和 AeroVironment TUAS 开始运营 • NM Tech、NMSU Atomic Aggies、美国西点军校发射火箭 • 虚拟太空港美洲杯 (2021 年 6 月),来自 16 个国家的 70 支队伍参加 • 为虚拟 NMSU STEM Outreach 制定课程计划,并在 NM 各地的教室提供虚拟参观和 STEM 演讲者 • 因与 LCPS 合作的 STEM 项目中的艺术整合而获得认可;与全球太空港联盟合作进行 STEM 国际空间站研究 • 与多位优秀的航空航天人才合作

Xiao liuXiao liu
六月研究助理。2020年 - 2024年8月•大型语言模型(LLMS)内的长期杂项机器人学习的发展状态空间建模,LLMS在维护州跟踪的同时执行计划和推理。•体现的AI:提出的diff -Control,一种将控制网络从图像生成到机器人动作的范围的动作扩散策略。[C7]•使用注意机制和可区分的过滤创建了一个多模式学习框架(𝛼 -MDF),该滤波器在潜在空间中进行多种模式的状态估计。[C5]•开发了可区分的集合Kalman过滤器(DENKF)框架,其中包含用于机器人学习的算法先验,即从观察值中学习系统dy -namics,以及从高维空间中的学习表示形式。[C4]•用智能手表部署了无处不在的机器人控制任务的智能滤波框架,即,电视,无人机驾驶。[C6]