XiaoMi-AI文件搜索系统
World File Search SystemCARLA
Carla Walker Act
在参议院引入的作者:参议员约翰·科恩(R-Texas);彼得·韦尔奇(D-Vt。)在众议院引入了:代表凯利·阿姆斯特朗(R-ND-at at large); Eric Swalwell(D-CA-14)背景:最近的创新,法医遗传谱系(FGG)技术通过显着提高与传统方法相比找到DNA匹配的概率来补充传统的DNA分析。该技术可以通过发现共享的DNA块来识别遗传概况的亲属,从而使研究人员能够建立有助于确定样本身份和解决病例的家谱。,合并后的DNA指数系统(CODI)尚未返回结果,FGG调查为解决犯罪的机会提供了很大的机会,这些犯罪持续了很长时间。通常,当犯罪嫌疑人的身份未知时,犯罪实验室将从犯罪现场回收的遗传物质上传到联邦调查局的国家数据库中,以搜索法医样本与任何已知罪犯之间的DNA匹配。这种传统的法医DNA分析形式仅检查13-20个短串联重复(STR)DNA标记,但FGG技术研究了更多的核苷酸多态性(SNP)。它是通过在公共遗传家谱数据库中与数百万人共享SNP标记的共享块来做到的。立法:《卡拉·沃克法案》将创建两个500万美元的试点计划,以支持FGG DNA分析,以帮助解决以前无法解决的冷病例。这项立法中的赠款资金将使这项尖端技术更广泛地可供调查机构使用,并帮助调查人员更好地解决以前无法解决的寒冷案件。该法案还将资助并实施一项试点计划,以资助未能导致DNA匹配的遗传样本的法医整个基因组测序。此外,《 Carla Walker Act》将资助新技术和设备,以进行法医遗传家谱,以协助识别工作并为以前身份不明的受害者寻求正义。该法案还将有助于免除错误的指控嫌疑人,并为受害者的亲人封闭。这项立法是以卡拉·沃克(Carla Walker)的名字命名的,卡拉·沃克(Carla Walker)于1974年被绑架,后来在德克萨斯州沃思堡(Fort Worth)被发现。不幸的是,由于当时的法医技术有限。FGG DNA分析能够将小格伦·麦克库利(Glen McCurley,Jr。)确定为卡拉·沃克(Carla Walker)的杀手。McCurley于2021年承认谋杀案,并于2023年7月14日在监狱中丧生。

课程
Teaching activity Master Courses 2024-present: Full Professor – Course Holder (‘Titolare') of Histology and Embryology (BIOS-13/A, former BIO/17) - Course in Medicine and Surgery - University of Torino (Turin, Italy) 2002-2024: Associate Professor – Course Holder (‘Titolare') of Histology and Embryology (BIO/17) - Course in Medicine and Surgery - University of Torino (意大利都灵)–N。监督的MD论文:2。1995-2001:助理教授 - 组织学和胚胎学课程(BIO/17) - 医学与外科课程 - 都灵大学(意大利都灵)。2019年至今:硕士论文主管 - 癌症干细胞的实验室课程持有人(Tirocinio) - 医学生物技术硕士课程 - 都灵大学(意大利都灵)。n。有监督的大师论文:6。博士课程和毕业后硕士2008年至今:教职员工(课程持有者和博士学位论文主管) - 分子医学博士学位课程(细胞科学与技术) - 都灵大学(意大利都灵)。n。监督博士学位论文:6。2001-2007:教职员工(博士学位论文主管) - 细胞科学和技术博士学位课程 - 医学院 - 都灵大学(意大利都灵)。n。监督博士学位论文:4。2018年至今:教职员工(课程持有者和博士学位论文主管) - 癌症干细胞作为治疗靶标课程 - 医学院医学院MD/PHD课程 - 多星大学(意大利都灵)。n。有监督的学生:2。2023年至今:共同服务 - 分子医学国际博士学位课程 - Vita-Salute San Raffaele大学(意大利米兰)。n。共同监督学生:2。2019-2022:共同服务 - 分子和实验医学博士学位课程 - 人类大学(Rozzano,意大利米兰)。n。共同监督学生:1。2006-2009:教职员工(教学协调员和课程持有人) - 分子肿瘤学后毕业硕士 - 都灵大学。

改进卡拉模拟器中的边界盒
摘要:Carla模拟器(学习行动)是测试算法并在自主驾驶领域生成数据集(AD)的强大平台。它提供了对各种环境参数的控制,从而可以进行彻底的评估。开发边界框通常是深度学习中通常使用的工具,并且在广告应用中起着至关重要的作用。使用边界盒识别和描述感兴趣的对象(例如车辆),用于识别和描述感兴趣的对象的主要方法。卡拉中的操作需要捕获地图上所有对象的坐标,随后与传感器的坐标系在自我车辆的坐标系统中,然后将相对于自我车辆的透视图包装在边界框中。但是,这种主要方法遇到了与对象检测和边界框注释相关的挑战,例如幽灵盒。尽管这些程序通常可以有效地检测其直接视线内的车辆和其他物体,但它们也可以通过识别被障碍物掩盖的物体来产生误报。我们已经增强了主要方法,目的是滤除不需要的盒子。绩效分析表明,改进的方法已经达到了很高的精度。

自动驾驶汽车模拟:Carla和...
本文探讨了开源模拟器Carla与自动驾驶汽车(AV)系统的AutoWare,开源软件的集成,以创建一个全面的虚拟测试环境。这种集成可以对具有不可预测的因素和不断变化的环境的动态,现实世界情景的空气反应进行安全且具有成本效益的测试。我们使用Carla 0.9.15和Autoware 2204.01模拟了各种场景,从城市交通到恶劣天气,它们通过基于ROS的桥进行链接,并使用AV传感器作为LiDAR,相机和雷达等AV传感器来镜像现实世界中的配置。绩效指标被收集和分析以确定系统的优势和局限性。调查结果表明,Carla和Autoware集成为端到端的AV模拟提供了一个强大的平台,这对于开发安全,合规和高效的自动运输系统至关重要。
CARLA LUCINI 简历 - 个人信息
-那不勒斯费德里科二世大学“Federica e-learning”电子平台:“兽医”科目的鱼类解剖学课程(http://www.federica.unina.it/medicina-veterinaria/)
Carla Short,公共工程总监Bruce Robert
Bruce Robertson,副董事,来自:Robert C. Begley,合同经理主题:环境计划服务2024 - 两项合同奖项董事的建议:奖励专业服务合同,As-Need Ended Endiveal Envirational Assistal Environmenal Envoryail Planning Services 2024,每人1,000,000美元的金额为1,000,000美元。计划服务。 合同背景:根据本合同进行的工作包括环境规划服务。 顾问执行环境计划服务,例如进行研究和调查,准备计划和规格,准备成本估算,写作报告以及对各种类型的监管,环境以及健康与安全问题进行现场检查。 工作范围包括但不限于:1)项目计划服务,2)与计划相关的报告和研究,3)环境合规性监控和其他相关专业服务。 顾问可以为整个项目,项目的一部分或任何项目阶段提供请求的服务。 顾问过去曾为城市提供此类服务。 招标过程:2024年9月18日,旧金山公共工程为ASSEADEDED ENDIED环境规划服务的资格要求(RFQ)做广告2024。 公共工程试图授予5个合同,预期的不超过100万美元的合同金额为1,000,000美元,合同期限为1,825个日历日。 2024年10月30日,公共工程收到了两个建议。Bruce Robertson,副董事,来自:Robert C. Begley,合同经理主题:环境计划服务2024 - 两项合同奖项董事的建议:奖励专业服务合同,As-Need Ended Endiveal Envirational Assistal Environmenal Envoryail Planning Services 2024,每人1,000,000美元的金额为1,000,000美元。计划服务。合同背景:根据本合同进行的工作包括环境规划服务。顾问执行环境计划服务,例如进行研究和调查,准备计划和规格,准备成本估算,写作报告以及对各种类型的监管,环境以及健康与安全问题进行现场检查。工作范围包括但不限于:1)项目计划服务,2)与计划相关的报告和研究,3)环境合规性监控和其他相关专业服务。顾问可以为整个项目,项目的一部分或任何项目阶段提供请求的服务。顾问过去曾为城市提供此类服务。招标过程:2024年9月18日,旧金山公共工程为ASSEADEDED ENDIED环境规划服务的资格要求(RFQ)做广告2024。公共工程试图授予5个合同,预期的不超过100万美元的合同金额为1,000,000美元,合同期限为1,825个日历日。2024年10月30日,公共工程收到了两个建议。合同监控部(CMD)为本合同建立了25%的本地业务企业(LBE)分包要求。市政府工作人员审查了这两项建议,并确定这两个建议都是响应和负责任的。然后由由个人知识渊博的人组成的小组评估和评估响应性和负责任的建议。未进行可选的口服访谈。该合同的前2个RFQ建议者是:Panorama Environmental,Inc。和TRC Solutions,Inc。
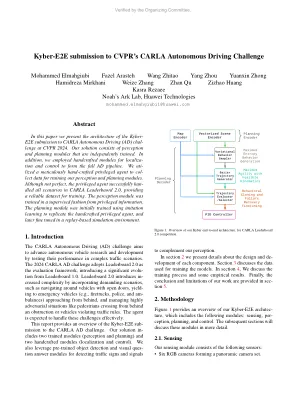
Kyber-E2E提交CVPR的CARLA自主驾驶挑战 计划以计划为导向的自主驾驶
在本文中,我们介绍了Kyber-e2e提交给Carla Automous Driving(AD)Challenge的架构,CVPR2024。我们的解决方案包括经过独立培训的感知和计划模块。此外,我们采用了手工制作的模块来进行本地化和控制,以形成完整的AD管道。我们为精心手工制作的特权代理人提供了培训数据,以培训我们的看法和计划模块。尽管并不完美,但特权代理商成功地将Carla Leaderbaord 2.0中的所有场景成功提供了培训的可靠数据集。感知模块是从特权信息中以有监督的方式培训的。该计划模块最初是使用模仿学习来复制手工制作的特权代理的培训,后来在基于重放的仿真环境中进行了微调。

Carla -Gear -Iris
摘要 - 对抗性示例代表了几个应用程序域中深层神经网络的严重威胁,并且已经制作了大量的工作来调查它们并减轻其效果。尽管如此,没有太多的工作专门用于评估神经模型的对抗性鲁棒性的数据集的生成。本文介绍了Carla-g Ear,这是一种自动生成与驾驶场景相关的照片真实合成数据集的工具,这些数据集可用于系统评估神经模型的对抗性鲁棒性,以针对物理对抗性斑块,以及比较不同对抗性防御/检测方法的性能。该工具是使用其Python API建立在Carla Simulator上的,并允许在自动驾驶的背景下生成数据集来完成多个视觉任务。生成的数据集中包含的对抗贴片连接到广告牌或卡车的背面,并通过使用最先进的白色盒子攻击策略来制定,以最大程度地提高测试模型的预测错误。最后,本文提出了一项实验研究,以评估某些防御方法针对此类攻击的性能,以表明如何将使用Carla-g e AR生成的数据集用作现实世界中对抗性防御的基准。本文中使用的所有代码和数据集可在http://carlagear.retis.santannapisa.it上获得。
通过球磨机械化学工艺从废弃贝壳中制备纳米晶体和无定形碳酸钙 Chiara Marchini, 1 Carla Triunfo, 1
通过球磨机械化学工艺从废贝壳中生产纳米晶和无定形碳酸钙 Chiara Marchini, 1 Carla Triunfo, 1,2 Nicolas Greggio, 3 Simona Fermani, 1 Devis Montroni, 1 Andrea Migliori, 4 Alessandro Gradone, 4 Stefano Goffredo, 2,3 Gabriele Maoloni, 5 Jaime Gómez Morales, 6 Helmut Cölfen, 7 和 Giuseppe Falini 1,* 1 博洛尼亚大学化学系“Giacomo Ciamician”,via F. Selmi 2, 40126 Bologna, 意大利,电子邮件:giuseppe.falini@unibo.it。2 Fano Marine Center,viale Adriatico 1/N 61032 Fano,意大利。3 博洛尼亚大学生物、地质与环境科学系,via F. Selmi 3, 40126 Bologna, Italy。4 微电子与微系统研究所 (IMM) - 博洛尼亚 CNR 分部,地址:P. Gobetti 101,邮编:40129,博洛尼亚,意大利。5 Finproject S.p.A.,工厂阿斯科利皮切诺,Via Enrico Mattei,1-Zona Ind.le Campolungo,3100 阿斯科利皮切诺,意大利。6 晶体学研究实验室,安达卢西亚地球科学研究所(CSIC-UGR),Avda Las Palmeras 4,18100 Armilla(格拉纳达),西班牙。7 康斯坦茨大学化学系、物理化学,Universitätsstrasse 10,Box 714,D-78457 康斯坦茨,德国。
由Carla Rus与Idelette Nutma合作编写的有关SSRI药物的医师信息文件(SEP
剂量,效果和指数在开始SSRI介绍前神经精神病学家Carla Rus和前护士Idelette Nutma(“ Sepsis en Daarna”的经理)于2022年1月开始合作,为后Covid综合症(以下称为PCS)提供了有关SSRI MEDITACH sSRI MEDITACH的患者(以下是PCS)。在她的漫长职业生涯中,卡拉·鲁斯(Carla Rus)已经在使用SSRI药物为我/CFS上获得了很多经验。由于PC的抱怨有很多重叠,因此她还开始建议许多PCS患者中的SSRI药物,以查看他们是否也可以从中受益。三分之二的患者报告了积极的影响,这是由于相当好的改进而产生的。一些PCS患者随后能够(部分)恢复其工作。结果,卡拉·鲁斯(Carla Rus)决定使这一知名度更高,同时呼吁进行大型研究(RCT)进一步研究这些效果,并对此问题有了更多的了解:哪些PCS患者是根据哪种作用机制进行药物工作的,以及哪些人对哪些行动不起作用?由于还没有RCT,因此我们决定进行探索性研究,作为迈向RCT的第一步。这是部分定性和部分定量研究。与我们联系的PCS患者询问他们是否可以参加这项研究,要求填写一个带有开放,结构化和半结构性问题的问卷。26.9%的人注意到略有改善,而9.7%的人没有变化。治疗的作用似乎有所不同。每个患者的副作用各不相同。在2023年11月2日,第一次药物遗传学干预的结果和阳性结果发表在科学报告中:“用SSRI治疗后95名SSRIS后covid后患者的结果治疗,7.5%的人报告了“强”改进,29%的A良好'A良好'改进,27%A'a'a 27%a'a'a'a'a'a'a'a'a'a'a'a'a'a'a'a'a'a'a'''''''。大脑雾和过度刺激的改善最大,随后是疲劳和心pal,而肌肉抱怨的改善最少。副作用31.6%最初经历了严重的副作用,54.7%温和,而没有副作用13.7%。在79.2%的副作用中,这些在几周内减少或消失。建议患者对剂量的反应强烈降低和/或切换到其他SSRI。在其中80%中,它们随着时间的流逝而消失或减少。