XiaoMi-AI文件搜索系统
World File Search SystemCURSOR

安全调查最终报告 - SKYbrary
ATM – 假定温度法 CRM - 机组资源管理 CCD - 光标控制装置 CCS - 光标控制选择器 CVR - 驾驶舱语音记录器 CDU - 控制显示单元 CG - 重心 CG MAC% - 以 % 表示的 CG 平均气动弦 EAFR - 增强型机载飞行记录器 EICAS - 发动机指示和机组警报系统 EFB - 电子飞行包 FMC - 飞行管理计算机 固定降低率 – TO/TO1/TO2 FLAR - 飞行日志和飞机释放 HUD - 平视显示器 MFD - 多功能显示器 MFK - 多功能键盘 MCP - 模式控制面板 MAC - 平均气动线 OPT - 机载性能工具 OMA - 操作手册 PF - 飞行飞行员 PM - 飞行员监控 PIC- 机长 QRH - 快速参考手册 TPR - 涡扇功率比 TOW - 起飞重量 V1 - 起飞决策速度 Vr - 旋转速度 V2 - 起飞安全速度 Vref - 参考速度 Vmu -最小脱杆速度 Vzf - 零襟翼机动速度 ZFW - 零燃油重量

在实验室外移动:在线进行感觉运动学习研究的生存能力
图1。响应视觉运动旋转的感觉运动学习。(a)视觉运动旋转任务的示意图。光标反馈(红点)相对于手的运动方向旋转,旋转的大小在各组(15°,30°,60°或90°)之间变化。半透明和纯色在学习的早期和晚期分别显示手和光标位置。(b,d)从Bond and Taylor(2015)和在线实验的实验实验中的15°(绿色),30°(黄色),60°(紫色)和90°(粉红色)旋转条件的平均手动训练。在Veridical反馈,无反馈(灰色背景)和旋转试验期间相对于目标(0°)的手(0°)提出。阴影区域表示SEM。(c,e)旋转块早期和晚期的平均手角度,以及从面对面(C)和在线(E)实验的无反馈后效应块。框图表示中位数(厚的水平线),四分位数(第1和3 rd,盒子的边缘)和极端(min and Max,垂直细线)。每个参与者的数据显示为半透明点。
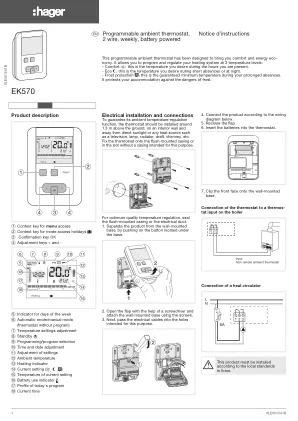
z可编程的环境恒温器,2台电线,每周,电池供电的通知d'unesstimes
将现有程序(P1,P2或P3)分配给一周中的一个或多天。•按键1菜单将光标放在prog下。一周中七天的指标闪烁。•按键4 +选择哪一天或几天,以将程序分配给。使用OK键确认。•P1闪烁。按键4 +选择要应用的程序。使用OK键确认。为例,将P2分配给五个工作日的组,然后将P1分配给两个周末的小组:•按KEY 1菜单将光标置于Prog下。一周中七天的指标闪烁。•按键4 +选择以影响五天的组(五天闪烁)。使用OK键确认。•P1闪烁。按键4 +选择(P2闪烁)。使用OK键确认。•按键4 +选择2个周末(2个周末闪烁的组)组。使用OK键确认。•P1闪烁。使用OK键确认。恒温器返回自动模式。

增强反馈和运动学习适应对人机交互因素的影响
人们对身体-机器界面的兴趣日益浓厚,因此有必要了解如何训练用户使用非传统输入。在本研究中,开发了一个由受试者激活的表面肌电图控制任务测试,作为试验台,以观察自动训练方法对绩效、工作量和信任发展的影响。48 名受试者学习使用基于表面肌电图的命令系统执行 Fitts 定律式光标到目标任务,其中包括 120 次训练试验和 40 次评估试验。受试者被分为四组:对照组、并发反馈组、终端反馈组和自适应阈值组。对照组使用光标位置的视觉反馈通过重复进行训练和学习。并发反馈组在命令输入期间收到额外的并发虚拟反馈,终端反馈组在命令输入后收到补充视觉反馈。自适应阈值组没有任何额外反馈,但经历了旨在诱导运动学习适应的光标控制变化。结果表明:I)额外的视觉反馈可提高训练期间的任务表现、工作量和信任;2)训练结束时,各组的指挥能力趋于一致。

对孤立音素的开始和持续神经反应的证据
我们开发了一项基于语音的自定步调光标控制任务,以在单独发出音素(即元音、鼻音和摩擦音)时收集相应的颅内神经数据。两名植入颅内深度电极以进行临床癫痫监测的患者通过实时处理麦克风输入执行闭环语音光标控制。在事后数据分析中,我们搜索了与非特定语音或特定音素的发生相关的神经特征。与之前的研究一致,我们在颞上回的多个记录点观察到了对语音的开始和持续反应。基于高达 200 Hz 的窄频带中的不同激活模式,我们以 91% 的准确率(机会水平:50%)跟踪语音活动,并以 68% 的准确率(机会水平:20%)将单个话语归类为五个音素之一。我们提出,我们的框架可以扩展到其他音素,以更好地描述在没有语言背景的情况下产生和感知语音的神经生理机制。总的来说,我们的研究结果为使用颅内电极开发语音脑机接口提供了补充证据和信息。索引词:音素识别、颅内电极、语音开始、持续语音、脑机接口

外周触觉反馈对大脑皮层内的影响...
摘要 — 皮层内脑机接口 (iBCI) 为瘫痪患者提供了一种通过从大脑活动解码的信号来控制设备的方法。尽管这些设备最近取得了令人瞩目的进展,但它们的控制水平仍然无法达到健全人的水平。为了实现自然控制并提高神经假体的性能,iBCI 可能需要包含本体感受反馈。为了通过机械触觉刺激提供本体感受反馈,我们旨在了解触觉刺激如何影响运动皮层神经元并最终影响 iBCI 控制。我们为四肢瘫痪患者的后颈提供了皮肤剪切触觉刺激来替代本体感受。通过使用单丝测试套件评估触觉灵敏度来确定颈部位置。参与者能够以 65% 的准确率正确报告 8 个不同方向的后颈皮肤剪切。我们发现运动皮层单元对剪切刺激表现出感觉反应,其中一些单元对刺激有强烈的响应,并可以通过余弦形函数很好地建模。我们还演示了在线 iBCI 光标控制,该控制由解码的命令信号驱动,并带有连续的皮肤剪切反馈。与纯视觉反馈条件相比,当参与者获得触觉反馈时,光标控制性能略有提高,但效果显著。

外周触觉反馈对大脑皮层内的影响...
摘要 — 皮层内脑机接口 (iBCI) 为瘫痪患者提供了一种通过从大脑活动解码的信号来控制设备的方法。尽管这些设备最近取得了令人瞩目的进展,但它们的控制水平仍然无法达到健全人的水平。为了实现自然控制并提高神经假体的性能,iBCI 可能需要包含本体感受反馈。为了通过机械触觉刺激提供本体感受反馈,我们旨在了解触觉刺激如何影响运动皮层神经元并最终影响 iBCI 控制。我们为四肢瘫痪患者的后颈提供了皮肤剪切触觉刺激来替代本体感受。通过使用单丝测试套件评估触觉灵敏度来确定颈部位置。参与者能够以 65% 的准确率正确报告 8 个不同方向的后颈皮肤剪切。我们发现运动皮层单元对剪切刺激表现出感觉反应,其中一些单元对刺激有强烈的响应,并可以通过余弦形函数很好地建模。我们还演示了在线 iBCI 光标控制,该控制由解码的命令信号驱动,并带有连续的皮肤剪切反馈。与纯视觉反馈条件相比,当参与者获得触觉反馈时,光标控制性能略有提高,但效果显著。

修订了Xposat Mission brochure.cdr
通过两次重新启动PS4,在650公里处注入XPOSAT后,PS4阶段将降低至350公里,〜9.6度轨道。PS4中剩下的推进剂将通过主要发动机作为光标处置,以使PS4阶段的安全性在将来计划在大气中重新进入实验。氧化剂将首先以预定的操作序列进行燃料。通过排泄储罐压力来发泄的现有支出阶段钝化方案也将是活跃的。PS4的钝化后,对阶段的控制被转移到诗歌航空电子。