XiaoMi-AI文件搜索系统
World File Search SystemCVPR

cvpr'00:恶劣天气中的视觉框架
常规视觉系统旨在在晴朗的天气中执行。但是,任何室外视觉系统都是完整的,没有任何机制可以保证在较差的天气条件下表现令人满意的性能。众所周知,大气可以显着改变到达观察者的光能。因此,必须使用大气散射模型在恶劣的天气下使视觉系统健壮。在本文中,我们开发了一个几何框架,用于分析大气散射的色彩效应。首先,我们研究了一个简单的颜色模型,用于大气散射,并验证雾和雾度的颜色模型。然后,基于散射的物理学,我们在场景颜色变化上得出了几种几何形状,这是由于变化的大气状况而引起的。最后,使用这些约束,我们可以从不同但未知的天气条件下拍摄的两个或多个图像中恢复“真实”场景颜色来计算雾或雾化,深度分割,提取三维结构并恢复“真实”场景颜色。
CVPR 2024 |计划指南主要会议 - EventHosts
在华盛顿西雅图举行的2024 IEEE/CVF计算机视觉和模式识别会议上!CVPR是IEEE/CVF和PAMI-TC的首要和旗舰年会,我们社区中的研究人员在理论和实践中介绍了他们在计算机视觉,模式识别,机器学习,机器人和人工智能方面的最新进展。我们的计划包括邀请的主题演讲,口头和海报演示,面板,教程,讲习班,演示,展览和社交活动,旨在为与会者提供令人兴奋且丰富的体验。CVPR 2024主要是一个面对面的会议,但是对于那些无法身体上加入我们的人,我们很高兴提供一个虚拟组件,该虚拟组件将访问会议论文,海报,视频和演讲。
Kyber-E2E提交CVPR的CARLA自主驾驶挑战 计划以计划为导向的自主驾驶
在本文中,我们介绍了Kyber-e2e提交给Carla Automous Driving(AD)Challenge的架构,CVPR2024。我们的解决方案包括经过独立培训的感知和计划模块。此外,我们采用了手工制作的模块来进行本地化和控制,以形成完整的AD管道。我们为精心手工制作的特权代理人提供了培训数据,以培训我们的看法和计划模块。尽管并不完美,但特权代理商成功地将Carla Leaderbaord 2.0中的所有场景成功提供了培训的可靠数据集。感知模块是从特权信息中以有监督的方式培训的。该计划模块最初是使用模仿学习来复制手工制作的特权代理的培训,后来在基于重放的仿真环境中进行了微调。

CVPR 2024的第一位解决方案自主挑战赛
A100 GPU。批处理大小设置为64,随机GRA-211 DIENT下降(SGD)[2]和基本学习率为0.05。212训练包括100个时期,队列大小为213,动量编码器为3,276,800。类似于Mocov2 [4]中描述的En-214 Hancements,我们利用了相同的215损耗函数和数据增强技术; (2)点216云预测阶段。在此阶段,我们在32 nvidia a100 gpus上训练217型。训练涉及218使用5帧的历史多视图图像和迭代219 219变压器解码器6次,以预测点云220,即接下来的3秒钟,每个框架间隔为0.5 sec-221 ONDS。为了保存GPU内存,我们在每个训练步骤中分离出222个其他预测的梯度。使用ADAMW [8] Opti-224 Mizer,初始学习速率为2E-4的系统223的系统进行了8个预训练时期,并通过余弦退火策略调整了225。226

owens-cv.pdf
专业活动共同组织者Umich AI研讨会(2024)CVPR研讨会主席(2024)首席组织者,视觉和声音研讨会,网址为CVPR 2018-2024。共同组织者,AV4D:空间工作室中声音的视觉学习,ECCV 2022,ICCV2023。共同组织者,开放世界视觉研讨会,CVPR 2021-2024。共同组织者,体现的多模式学习研讨会,位于ICLR 2021。评论者:CVPR(2015-2020,2022),ICCV(2015,2017,2019,2019,2021),ECCV(2016,2018,2018,2020,2022),Siggraph(2020,2024),Siggraph Paphaph Asia(2024),(2024),ICLR(2018,2024) (2017),Neurips(2017、2019、2021、2022),CHI(2018),UIST(2019),ACL(2022),Corl(2022),ICASSP(2023)(2023)区域主席:CVPR:CVPR(2021,2023,2023,2024,2025),Neurips(Neurips(Neurips),Neurips(2023),20222222222222222222222222222222222222222222222222222222222222222222222222222222年2月22日(neurips)(neurips datev)(neurips)( (2023),ICCV(2023),ECCV(2024)NSF小组成员(2023,2024)
非刚性场景从点云流动,并带有自我感动...
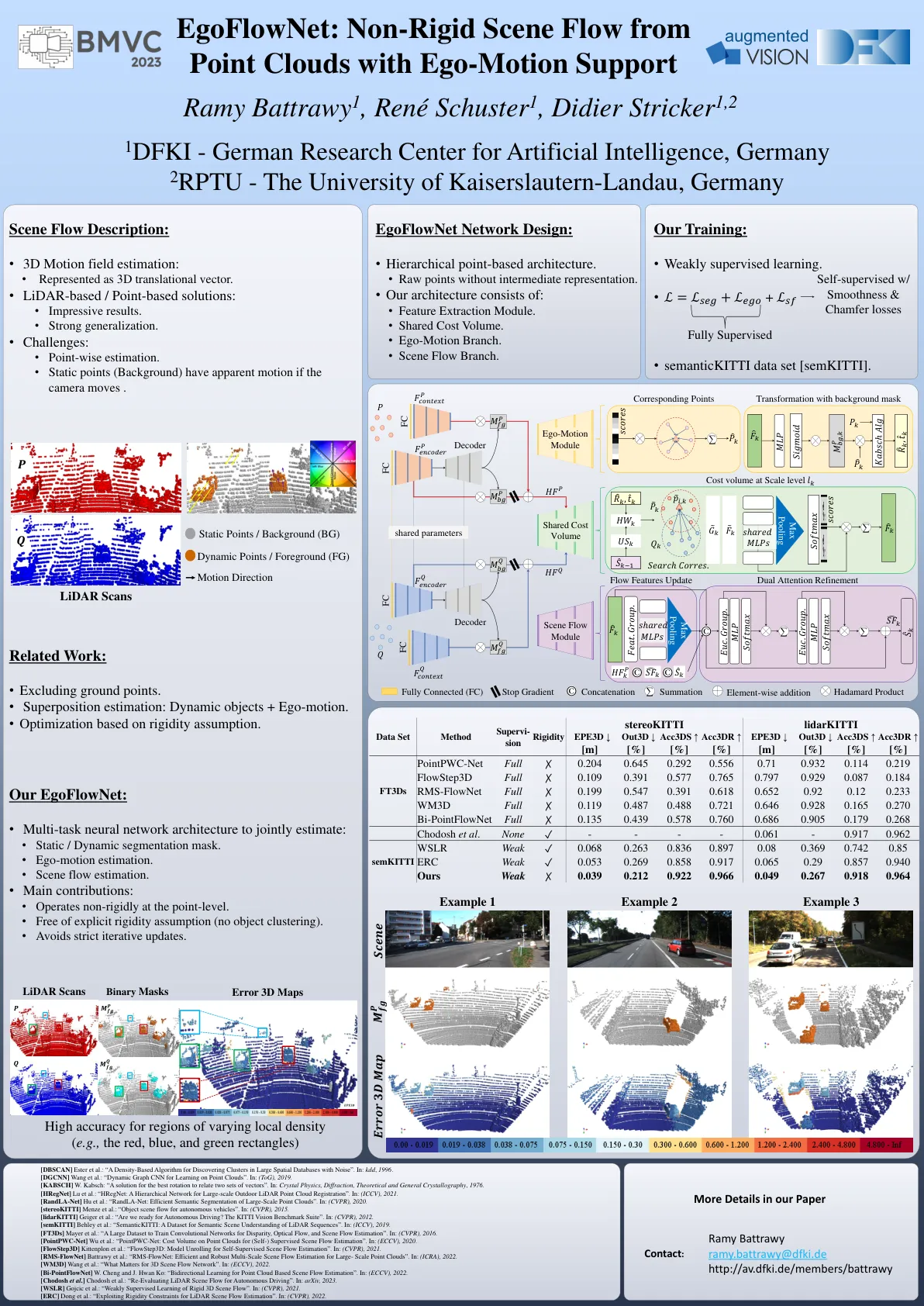
[dbscan] Ester等。:“一种基于密度的算法,用于在具有噪声的大空间数据库中发现簇”。:KDD,1996年。[DGCNN] Wang等。:“用于在点云上学习的动态图CNN”。in :( tog),2019年。[Kabsch] W. Kabsch:“解决两组向量的最佳旋转解决方案”。in:晶体物理学,衍射,理论和一般晶体学,1976年。[Hregnet] Lu等。:“ Hregnet:用于大规模室外激光点云注册的分层网络”。in:(iccv),2021。[Randla-net] Hu等。:“ randla-net:大规模点云的有效语义分割”。in:(cvpr),2020。[Stereokitti] Menze等。:“自动驾驶汽车的对象场景流”。in:(cvpr),2015年。[Lidarkitti] Geiger等。:“我们准备好进行自动驾驶了吗?Kitti Vision基准套件”。in:(cvpr),2012年。[Semkitti] Behley等。:“ Semantickitti:用于LIDAR序列的语义场景的数据集”。in:(ICCV),2019年。[FT3DS] Mayer等。:“一个大型数据集来训练卷积网络以差异,光流和场景流量估计”。in:(cvpr),2016年。[pointpwc-net] Wu等。:“ PointPWC-NET:(自我监督场景流估计)点云上的成本量”。在:(ECCV),2020年。[FlowStep3d] Kittenplon等。:“ FlowStep3d:自我监督场景流估计的模型展开”。in:(cvpr),2021。[RMS-FLOWNET] Battrawy等。:“ RMS-FLOWNET:大规模点云的高效且稳健的多尺度场景流程估计”。in:(icra),2022。[WM3D] Wang等。:“对于3D场景流网络重要的东西”。in:(ECCV),2022。[Bi-Pointflownet] W. Cheng和J. Hwan Ko:“基于点云的场景流估计的双向学习”。in:(ECCV),2022。[Chodosh等人]Chodosh等。:“重新评估激光雷达场景以进行自动驾驶”。in:arxiv,2023。[WSLR] Gojcic等人。:“严格3D场景流的弱监督学习”。in:(cvpr),2021。[ERC] Dong等。 :“利用震子场景流量估计的刚性约束”。 in:(cvpr),2022。[ERC] Dong等。:“利用震子场景流量估计的刚性约束”。in:(cvpr),2022。
在线学习课程学习的在线超参数优化
参考[1] Hou,Saihui等。“通过重新平衡来逐步学习统一的分类器。”CVPR2019。[3] Liu,Yaoyao,Bernt Schiele和Qianru Sun。“用于课堂学习学习的自适应聚合网络。”CVPR 2021。[4]刘,Yaoyao,Bernt Schiele和Qianru Sun。“ RMM:用于课堂学习学习的增强记忆管理。”神经2021。[5] Rebuffi,Sylvestre-Alvise等。“ icarl:增量分类器和表示学习。”CVPR2017。[6] Li,Zhizhong和Derek Hoiem。“学习而不会忘记。”TPAMI2017。

Yihua Zhang
Yuhao Sun(本科@USTC,PhD@thu) - [提交给CVPR'25] 5月。 2024-当前的Hanhui Wang(Master@USC) - [提交给CVPR'25] 5月。 2024-当前的Chongyu粉丝(本科@hust,PhD@msu) - [[ICLR'24 Spotlight] May。 2023-当前的Haomin Zhuang(Phd@Notre Dame) - [[Cvprw'23]],[提交给ICLR'25] 2022年12月 - 当前CAN CAN JIN(Undergraduate@ustc,phd@rutgers)博士@hkust) - [[CVPR'23],[ICLR'24]] 2022年10月 - 2023年10月Mohammad Jafari(Sharif Technology,Sharif Technology) - [ICASSP'24]] 5月。 2023- 2023年10月Yuhao Sun(本科@USTC,PhD@thu) - [提交给CVPR'25] 5月。2024-当前的Hanhui Wang(Master@USC) - [提交给CVPR'25] 5月。2024-当前的Chongyu粉丝(本科@hust,PhD@msu) - [[ICLR'24 Spotlight] May。2023-当前的Haomin Zhuang(Phd@Notre Dame) - [[Cvprw'23]],[提交给ICLR'25] 2022年12月 - 当前CAN CAN JIN(Undergraduate@ustc,phd@rutgers)博士@hkust) - [[CVPR'23],[ICLR'24]] 2022年10月 - 2023年10月Mohammad Jafari(Sharif Technology,Sharif Technology) - [ICASSP'24]] 5月。2023- 2023年10月

Kyber-E2E提交CVPR的CARLA自主驾驶挑战计划以计划为导向的自主驾驶
●任务层次结构:任务已井井有条,并掌握了op&mize Informa&on flo to to planner