XiaoMi-AI文件搜索系统
World File Search SystemCav

Urban Freeway互换中连接的自动化和人类驱动的车辆混合交通:安全分析和登机假设
摘要:在高速公路上引入连接的自动化车辆(CAVS)提出了重大挑战,尤其是在与人类驱动车辆的互动中,影响交通流量和安全性。本研究采用交通微仿真和替代安全评估措施软件来研究Cav -Human驾驶员的相互作用,从而估计潜在的冲突。虽然先前的研究承认,与骑士共享道路时,人类驾驶员可以调整其行为,但尚未完全了解相关风险的根本原因和范围。该研究的重点是CAV的存在如何减少冲突,采用替代安全措施和现实世界中混合的交通数据,并评估意大利和美国在各种城市环境中的高速公路交换配置的安全性和性能。本研究提出了用于优化城市布局的工具,以最大程度地减少混合交通环境中的冲突。结果表明,添加辅助车道会增强安全性,尤其是用于骑士和后端碰撞。沿着互换坡道,在纵向冲突方面,独家的CAV流与人类驱动的行为相似,但是混合的交通流(由CAVS和人类驱动的车辆组成)可能会导致更多冲突。值得注意的是,当骑士在几乎相同的条件下跟随人类驱动的车辆时,会出现更多的冲突,强调CAV整合的复杂性以及仔细的安全措施和道路设计考虑因素的需求。
投资牛津郡
牛津郡是 CAV 开发的全球中心。卡勒姆科学中心的 CAV 维修站于 2019 年开放,使汽车制造商和自动驾驶汽车开发商能够在 80 多个研发项目中改进和测试高级驾驶辅助系统 (ADAS) 和自动驾驶系统。OxLEP 通过政府的地方增长基金为 CAV 维修站获得了价值 230 万英镑的投资。牛津大学的衍生公司 Oxa 与地区和国际合作伙伴建立了令人兴奋的联系,并正在卡勒姆的 RACE 设施与他们合作,以加速通用自动驾驶软件的开发。Five AI 在伦敦的公共道路上创建了一套自动驾驶系统,并于 2022 年被博世收购。牛津的 StreetDrone 是欧洲第一家在道路上运行开源自动驾驶汽车的公司。它的技术现在使在受控物流环境中工作的低速车辆能够自主运行。位于哈威尔的达尔文卫星通信实验室得到了英国和欧洲航天局的支持,是英国第一个用于测试无人驾驶汽车技术的空间。
全日制MBA实习报告
美国运通公司、苹果公司、Aspen Mountain Partners、CapShift、CAV Angels、思科系统公司、花旗集团、康尼格拉品牌、德勤咨询公司、艾默生、Evercore Partners、安永-帕台农神庙、通用磨坊公司。

2023 年盖尼杯
• 第 6 中队、第 1 骑兵团、第 1 装甲旅战斗队 (ABCT)、第 1 装甲师:PFC Tayvion Jones、SGT Ryan Austin、SPC Dade Horton、SPC Wyatt Carson、SPC Kadin Graham 和 SSG Rebiejo Zackery。• 第 1 中队、第 4 骑兵团、第 1 装甲旅战斗队、第 1 骑兵师:SSG Levi Cowart、SPC Carlin Coomey、SPC Patricio Alduvin、SPC Michael Stitely、PFC Aiden Harris 和 PFC Aiden Hernley。 • 第 1 营、第 5 骑兵团、第 2 ABCT、第 1 骑兵师:SSG Tyler Mehl、SGT Eric Szudy、SPC Gregory Harrington、SPC James Saul、PFC Itler Mbula 和 PFC Alexander Erickson。• 第 4 中队、第 3 美国骑兵团、第 1 骑兵师:SSG Noah Kokkeler、SGT Alberto Torres、SPC Corey Catron、PFC Cameron Waites、PV2 Iaza Ingoglia 和 PV2 Braxton Flicker。 • 第 8 中队、第 1 骑兵团、第 2 斯瑞克旅战斗队 (SBCT)、第 2 步兵师:SSG Nicolas Vallez、SGT Matthew Keylich、SPC Rasheed Wallace、PFC Eric Moldenhauer、PFC Skylur Hester 和 PFC Carson Ringler。 • 第 4 中队、第 2 骑兵团、第 2 CR、美国陆军欧洲和非洲 (USAEUR-AF):SSG Ryan Cardiff、SGT John Wendt、SPC Brian Riverang、SPC Ryan Rocha、SPC Benjamin Walker 和 PFC David Doucette。 • 第 6 中队、第 8 骑兵团、第 2 ABCT、第 3 步兵师:SGT Charles Johnson、SGT Casey Trull、SPC Jose Cota、SPC Cameron Palmer、PFC Ethan Conley 和 PFC Jordan Calfy。 • 第 2 中队、第 1 骑兵团、第 1 SBCT、第 4 步兵师:SSG Steven Bouton、SGT Liam Mackrell、SPC Travis Pembridge、SPC Christopher Cancel、SPC Christian Suchite 和 PV2 Darren Manriquez。 • 第 1 中队、第 14 骑兵团、第 1 SBCT、第 7 步兵师:SSG Wyatt Lilienthal、SGT Steven Reynoso、SPC Rafael Lopez、SPC Byron Kyger、SPC Guillermo Carrera 和 SPC Matthew Kiddle。 • 第 3 中队、第 89 骑兵团、第 3 IBCT、第 10 山地师:SSG Shawn Deen、SGT Joshua Valesco、SPC Tyler Deaton、SPC Adrian Fuentez、PFC Walter Moreno 和 PFC Henry Swearingen。 • 第 2 中队、第 11 装甲骑兵团 (ACR)、第 11 ACR、国家训练中心:SSG Hendryx- Steven Solis、SGT Gyres Fouelefack、SPC Dalton Langer、SPC John Pacheco、SPC Jonathan Whiteside 和 SPC Matthew Runk。• 第 5 中队、第 1 骑兵团、第 1 IBCT、第 11 空降师:SSG Wayne Schultz、SGT Seth Marshall、PFC Cameron Patrick、PFC Damian Tapia、PFC Aiden Wood 和 PV2 Austin Heath。 • 第 2 中队、第 14 骑兵团、第 2 步兵战斗旅、第 25 步兵师:SSG Jacob Lahti、SGT Michael Green、SPC Mason Golden、PFC Sebastien Barragan、PFC Diego Cade 和 PFC Damien Deleon。• 第 1 中队、第 73 骑兵团、第 2 步兵战斗旅、第 82 空降师:SSG Eric Nevadunsky、SGT Julian Glasser、SPC Mario Flamenco、SPC Andrew Rutherford、SPC Santos Portillo 和 SPC Parker Holland。 • 第 1 中队、第 33 骑兵团、第 3 旅战斗队、第 3 IBCT、第 101 空降师:SSG Joseph Rosas、SGT Connor Pelletier、SPC Michael Joaquin、SPC Henry Wasserman、PFC Aidan Nelson 和 PFC Joseph Smith。• 爱尔兰第 1 装甲骑兵中队:LT Alex McNamara,SGT Kevin Conlon、CPL Anthony Sheehy、TPR Gabriel Garbencius、TPR Declan Behan 和 TPR Oisin Duffy。• 美国欧洲陆军空军第 1 中队、第 91 骑兵团、第 173 空降旅:SSG Graham Brown、SGT Jake Bullock、SPC Nicholas DuBois、SPC Anthony Valdez、PFC Jonathan Wilkey 和 PV2 Tyler Solaita。

联网和自动驾驶汽车中基于人工智能的车道变换模块的设计:一项调查
摘要 变道是一项复杂的驾驶任务,因为它要求车辆了解高度动态的周围环境,做出决策并及时执行。通过利用传感器和车辆间通信,网联和自动驾驶汽车 (CAV) 有可能显著提高变道的安全性和效率。任务的复杂性和实时性要求使得变道成为特别适合人工智能 (AI) 方法的问题。在本文中,我们调查了基于 AI 的 CAV 变道 (LC) 模块的设计。首先,我们确定可能影响 LC 模块设计的关键因素。接下来,我们调查了基于 AI 的变道的最新发展。最后,我们从关键影响因素的维度分析这些方法,并总结尚未解决的挑战和可以指导基于 AI 的 LC 模块未来发展的机遇。
行业日 - 民事IITB
加入我们,塑造印度与互联和自动驾驶汽车(CAV)的首个研发生态系统。本次活动将汇集行业领导者和学术研究人员,以合作针对印度独特的挑战和全球影响而量身定制的可扩展的创新解决方案。
2022 年时事通讯 - 声学与振动中心
过去的一年是 CAV 转型的一年。我们恢复了面对面的年度研讨会,但增加了在线出席和讲座直播——我们打算在今年和未来继续这一功能。我们继续在 YouTube 频道 (https://www.youtube.com/channel/UCG1jhLJmP3urA7mDYoiq1aQ) 上存档我们的研讨会讲座以及定期的技术研讨会。我们的声学研究生课程换了一位新主任——安德鲁·巴纳德博士。安德鲁是一名校友,在密歇根理工大学工作数年后,他回来领导我们的课程进入新的技术领域。我们还开始改造我们的 CAV 和声学实验室空间,与建筑师合作,在我们计划在西校区建造的新工程大楼中设计改进的实验室。宾夕法尼亚州立大学的研究人员将可以使用改进的消声室和混响室,以及声功率传输损失窗口。
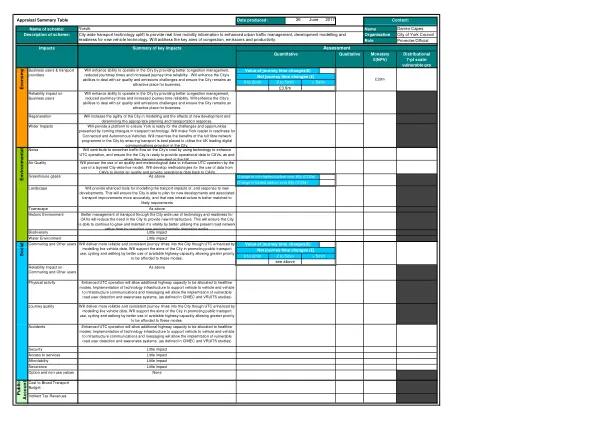
评估汇总表 - 约克市议会
历史环境 通过城市广泛使用技术和为 CAV 做好准备,更好地管理交通,将减少城市提供新基础设施的需求。这将确保城市能够通过更好地利用现有道路网络继续发展并保持活力

通过随机分散模型预测控制
摘要 - 连接和自动化的车辆(CAV)网络中的通信延迟显着影响基于连接的优化协调,增加了碰撞风险和降解系统性能。现有方法受到实时计算挑战,过时的数据,可扩展性约束和管理不确定性的困难的限制。本文提出了一种随机分散的模型预测控制(SDMPC)框架,以通过合并一种新颖的随机近似方法来模拟不确定性,以减轻通信延迟的不利影响。我们的方法提供了对安全限制的紧密概率约束,从而确保了准确的训练有素的预测并改善了协调。仿真结果表明,与在各种通信延迟条件下的常规方法相比,所提出的SDMPC框架减少了平均轨迹偏差,并降低了碰撞风险。这些改进使SDMPC成为大型CAV网络的有效解决方案,从而提高了安全性和效率。

通过随机分散模型预测控制
摘要 - 连接和自动化的车辆(CAV)网络中的通信延迟显着影响基于连接的优化协调,增加了碰撞风险和降解系统性能。现有方法受到实时计算挑战,过时的数据,可扩展性约束和管理不确定性的困难的限制。本文提出了一种随机分散的模型预测控制(SDMPC)框架,以通过合并一种新颖的随机近似方法来模拟不确定性,以减轻通信延迟的不利影响。我们的方法提供了对安全限制的紧密概率约束,从而确保了准确的训练有素的预测并改善了协调。仿真结果表明,与在各种通信延迟条件下的常规方法相比,所提出的SDMPC框架减少了平均轨迹偏差,并降低了碰撞风险。这些改进使SDMPC成为大型CAV网络的有效解决方案,从而提高了安全性和效率。