XiaoMi-AI文件搜索系统
World File Search SystemCollabora

crada 指南.pdf
根据 1980 年《史蒂文森-怀德勒技术创新法》(经 1986 年《联邦技术转让法》修订)的规定,CRADA 允许联邦政府和非联邦合作伙伴优化资源、在受保护的环境中共享技术专长、共享努力中产生的知识产权并加速联邦开发技术的商业化。研究目标虽然对适合 CRADA 的研究主题没有限制,但所有 CRADA 研究项目都必须高度集中和细分,并且必须仔细评估每个提议的 CRADA 的整体研究目标。在考虑拟议的 CRADA 时,双方应确定拟议合作的目标是否值得建立 CRADA,或者其目标是否更适合通过采购合同、材料转让协议、合作协议或其他合同机制来实现。拟议合作者的科学和商业能力也将受到评估。能源部 (DOE) 战略伙伴关系项目通常旨在支持与 DOE 的使命和战略目标相一致的第三方研究工作。这些项目旨在应对能源、环境和国家安全方面的各种挑战。适合 DOE CRADA 项目的具体研究项目类型可能有所不同,但以下是一些示例:
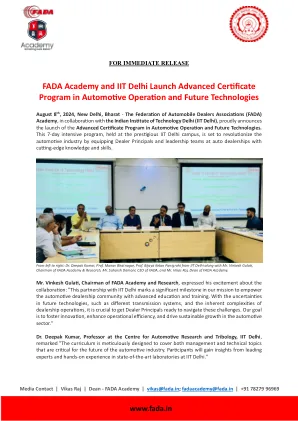
FADA学院和IIT Delhi发射高级Cer6ficate ...FADA学院和IIT Delhi发射高级Cer6ficate ...
从LE(到右):Deepak Kumar博士,Manav Bhatnagar教授,来自IIT DELHI的Bijaya Ketan Panigrahi教授以及Fada Academy&Research的主席Vinkesh Gulad先生,Fada和Fada先生,Fada和Fada Accor of Fada Accity。 FADA学院和研究主席Vinkesh Gulap先生对合作者表示兴奋:“与IIT Delhi的这种合作伙伴关系标志着我们的任务是为了赋予与高级教育社区的汽车,VE经销商社区的能力,并具有重要的里程碑。 在未来的技术(例如不同的传输系统)和固有的综合体(经销商歌剧院)中,不确定性的ES,即使经销商校长准备应对这些挑战是至关重要的。 我们的目标是促进创新,增强歌剧,效率和推动汽车行业的可持续增长。” IIT DELHI汽车研究与摩擦学中心教授Deepak Kumar博士说:“课程是ME,旨在涵盖CRI的管理和技术主题,这些主题是CRI,CAL,CAL为汽车的未来,VE行业的未来。从LE(到右):Deepak Kumar博士,Manav Bhatnagar教授,来自IIT DELHI的Bijaya Ketan Panigrahi教授以及Fada Academy&Research的主席Vinkesh Gulad先生,Fada和Fada先生,Fada和Fada Accor of Fada Accity。FADA学院和研究主席Vinkesh Gulap先生对合作者表示兴奋:“与IIT Delhi的这种合作伙伴关系标志着我们的任务是为了赋予与高级教育社区的汽车,VE经销商社区的能力,并具有重要的里程碑。在未来的技术(例如不同的传输系统)和固有的综合体(经销商歌剧院)中,不确定性的ES,即使经销商校长准备应对这些挑战是至关重要的。我们的目标是促进创新,增强歌剧,效率和推动汽车行业的可持续增长。”IIT DELHI汽车研究与摩擦学中心教授Deepak Kumar博士说:“课程是ME,旨在涵盖CRI的管理和技术主题,这些主题是CRI,CAL,CAL为汽车的未来,VE行业的未来。par,Cipant将从IIT Delhi的最先进的实验室中获得领先的专家和实践经验的见解。”
DE-SIMONE-Carlo-CV.pdf
企业管理顾问(个人干预领域:战略、工业控制、市场营销、组织和人力资源、质量和环境体系、融资、机构援助)、合伙人、经理质量和响应。 I&S Srl 的 PMI 业务领域,是一家专门从事以下领域的咨询公司:企业管理咨询(管理、营销、战略、质量部门、普通和补贴融资的投资规划、投资方案分析和调查、预算和报告、财务规划)为 PMI 提供 - 客户公司的产品领域:建筑、运输、食品、服务、酒店、 IT 、金属加工、航空、工厂工程、商业培训有经验和未经验人员(在咨询干预领域)工业设计服务(风电场)为公共机构提供的服务(公共工程规划、协助区域协议管理机构、PIT、PIR、社会经济计划)为 PA 机构和 PMI 规划和管理区域和国家融资,为 PMI 规划和管理欧洲融资(地平线 2020)偶尔与其他咨询公司合作开展综合项目 AICQ SICEV 课程和 ISO 9001 考试质量体系评估员质量经理 - 组织和资源I&S Srl 公司成员那不勒斯特许会计师协会质量委员会成员 (2003-2005)
C-ESG 风险圆桌会议抵押品工作流报告
银行和监管机构都认识到环境因素可能成为金融风险的一个来源,因此必须加大力度确保正确识别、理解、衡量、管理和监督此类风险。为实现这一目标,银行正在重新审视其内部系统、模型和流程,特别是与数据收集、风险管理和信贷审批流程相关的系统、模型和流程。由于银行投资组合的风险状况反映了其客户的风险状况,因此,为了降低风险,银行也在迅速加深与客户的接触,以了解他们的过渡计划并协助他们进行必要的业务转型。然而,尽管银行取得了切实的进步,但它们仍面临着众多运营和实施挑战,其中许多挑战既不是银行业本身的产物,也不是银行业固有的。虽然有些问题需要在单个组织层面解决,但其他问题将受益于银行、监管机构和监督者之间的协作方法和集体解决方案和讨论。

Bret Hamilton Microelectronics&Advanced Technology Strategy Applied ResearchInsɵtute(ARI)Bret Hamilton高级副总裁曾担任高级
Bret Hamilton Microelectronics&Advanced Technology Strategy Applied ResearchInsɵtute(ARI)Bret Hamilton担任ARI的微电子和高级技术战略高级副总裁。以这种身份,他制定了改善区域技术帽质的战略,并通过Innovaɵon来推动经济发展。他的工作主要专注于访问和开发最先进的微电子和相关技术。加入ARI之前,布雷特(Bret)在国防部完成了27年的职业生涯。最近,他曾在国防部副部长的副官员官员副首席技术官员中担任副首席技术官员的副首席总监。先前的经验包括微电子学(SSTM)的Scients,值得信赖的微电子学首席工程师和海军水面战中心起重机部(美国海军部)的高级Scienɵst。在他的整个职业生涯中,布雷特(Bret)帮助弥合了商业部门与国防工业基础(DIB)之间的差距,并导致合作团队为DOD武器系统(CRIɵCALNAɵCALNAɵCALONAL基础设施和消费产品)开发了更安全,更强大的微电子供应链。他已经在众议院武装服务子公司之前担任与信任和保证的微电子学有关的问题专家,并拥有广泛的合作伙伴网络,包括世界一流的商业半导体基础,Fabless Design Companies和Mulɵple政府机构。Bret还担任美国Fronɵer基金的顾问。

Andrea Marongiu - 课程
Andrea Marongiu 于 2010 年获得意大利博洛尼亚大学电子、计算机和电信工程博士学位。` 他曾担任瑞士苏黎世理工大学(ETHZ)的博士后研究员和博洛尼亚大学计算机科学与工程系(DISI)的助理教授(RTD A)。他目前是摩德纳和雷焦艾米利亚大学物理、计算机和数学科学系 (FIM) 的副教授。` 他是摩德纳和雷焦艾米利亚大学技术与社会创新计算机与数据科学博士课程的协调员。他的研究兴趣集中于单芯片异构、高度并行系统(MPSoC)的架构和编程模型。这包括语言、编译器和运行时系统方面,用于有效处理多核和众核嵌入式系统中的性能、可预测性、功率效率和可靠性问题,以及基于加速器的 MPSoC 的硬件/软件协同设计。在该领域,他在国际会议和期刊上发表了 120 多篇论文,被引用超过 2000 次,h 指数为 28 [Google Scholar]。他与众多研究和工业机构进行了合作和协作。
2023 年 7 月 / 8 月
• MMMIGS 博士学位资助:自 2023 年初以来,七项新的 MMMIGS 博士学位资助已颁发给 MMM 工作组和研究所的成员。你的博士生会是下一个吗?有关更多信息,请访问 nyurl.com/4bd9x6pr • MMMIGS Intro2PhD:在 2023 年夏季学期,七名刚入学的博士生定期会见 MMMIGS 协调员 Lena Wollschläger 博士,以了解和讨论诸如我和自我管理等主题、制定研究问题以及向科学界和公众传播研究成果。下一批学生将于 2023 年秋季开始学习,请关注 nyurl.com/4kepbtv5 上的公告 • MMMIGS 网络优惠:MMMIGS 为博士生、结构化博士课程的导师和协调员提供各种交流机会。已建立了有关博士学位流程的协作手册和在线交流平台,可发送电子邮件至 mmmigs@uni-bremen.de 申请访问。此外,还将很快举办一系列针对博士生的新联谊活动,有关详细信息,请访问 nyurl.com/mr2m43u2 • MMMIGS 为 MMM 成员提供的支持:MMMIGS 为设立结构化博士课程和申请此类课程的内部认可或第三方资助提供支持。此外,还为 MMM 成员和 MMMIGS 网络中的博士课程提供有关争取博士职位或费用的建议和财政支持。请联系 MMMIGS 协调员 Lena Wollschläger 博士了解更多信息。

对ICT 2024 - 2
u“ lity congula” on and compe''Box 10189 Grand Cayman Ky1- 1002 Cayman Islands Electhial:Consulta“ ons@ofreg.ky.ky主题:Consulta7on ICT 2024 - 2 - 基于卫星的Telecommunica7ons提供者的许可框架。>Box 10189 Grand Cayman Ky1- 1002 Cayman Islands Electhial:Consulta“ ons@ofreg.ky.ky主题:Consulta7on ICT 2024 - 2 - 基于卫星的Telecommunica7ons提供者的许可框架。GSOA欢迎有机会在拟议的基于卫星的Telecommunica“ ONS Provers”(“卫星框架”)的拟议框架上“在公共咨询中进行“联系”。gsoa赞扬其在其效率上的u上(ofreg)上的“ u iten congula”,以简化和透明的方式开发卫星框架,以进一步进一步进一步发展塞特曼群岛的卫星通信的“互联网”的发展。改善卫星框架的工作至关重要,因为它将直接影响卫星部门的结构和生长轨迹。除其他外,卫星框架将塑造出炽热的“ VES,以投资于该行业,并使其“ nude evolu”和引入Innova”服务的能力。它也将影响消费者能够从卫星运营商提供的服务中受益的程度。通过简短的背景,GSOA是全球的非培养协会,“它是全球合作的首要合作者”,代表“ ng ng the the eN” re satellite生态系统并将行业融合在一起。作为首席执行官卫星协会,GSOA领导着应对全球挑战,抓住机会的“机会”,并为卫星行业提供了统一的声音。GSOA is widely recognized as the representa"ve body for satellite operators by interna"onal, regional, and na"onal en""es, including regulators, policymakers, standard-seang organiza"ons like 3GPP, and interna"onal organiza"ons such as the Interna"onal Telecommunica"ons Union (ITU), the Inter-American Telecommunica"on Commission (Citel)和世界经济论坛(WEF)我们的愿景是通过“挑剔的数字,教育”来帮助政策制定者改善世界状况,跨越各种地理位置以及整个成熟和发展中经济体的健康,社会,性别和经济鸿沟。

BPH Global Ltd
2025年2月18日,公司公告Pla9orm澳大利亚证券 •在公司的基于印尼的海藻业务中的Inijal部署•三年期限订阅协议BPH Global Ltd(ASX:BP8)(公司)(公司)很高兴地宣布任命分布式Ledger Technologies Pte Ltd(称为#DLTLEDGERS)(称为#DLTLEDGERS),以便为blovkain Chain Chain和Vistibility Tracking Tracksing和Seaf 该公司已与#DLTleDgers达成36个月的订阅<部署区块链跟踪U 这个mul < - 政党乐团 该公司对跟踪和可见性Pla9orm的部署将在其基于印尼的海藻歌剧院 •从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。•在公司的基于印尼的海藻业务中的Inijal部署•三年期限订阅协议BPH Global Ltd(ASX:BP8)(公司)(公司)很高兴地宣布任命分布式Ledger Technologies Pte Ltd(称为#DLTLEDGERS)(称为#DLTLEDGERS),以便为blovkain Chain Chain和Vistibility Tracking Tracksing和Seaf 该公司已与#DLTleDgers达成36个月的订阅<部署区块链跟踪U 这个mul < - 政党乐团 该公司对跟踪和可见性Pla9orm的部署将在其基于印尼的海藻歌剧院 •从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。该公司已与#DLTleDgers达成36个月的订阅<部署区块链跟踪U 这个mul < - 政党乐团 该公司对跟踪和可见性Pla9orm的部署将在其基于印尼的海藻歌剧院 •从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。这个mul < - 政党乐团 该公司对跟踪和可见性Pla9orm的部署将在其基于印尼的海藻歌剧院 •从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。该公司对跟踪和可见性Pla9orm的部署将在其基于印尼的海藻歌剧院 •从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。•从第三方供应商那里购买海藻; •销售来自本地(印尼)和亚洲买家的来源的海藻的销售。该公司认为,Proteus技术非常适合该公司的Exis Proteus的模块化设计允许将来的可伸缩性,支持Proteus的模块化设计允许将来的可伸缩性,支持
自然策略Arauco 2023
气候变化:在过去的十年中,鱼类的风险一直是eCɵng生态系统的主要现象,目前有9,000多公顷的生态系统受到影响,目前正在Restoraɵon中。到目前为止,尚无与温度升高或沉淀物变化相关的主要害虫或疾病,但到目前为止,尚未证明存在与MulɵplePaper的不同技术和合作,但正在通过不同的技术和合作来评估一些Arauucaria araucanapopulaɵ和异常死亡率。正在监测有关水平衡,湿地和依赖水的生态系统,特别评估智利最北部地区的地下水水平。添加,我们与受威胁物种的PotenɵAl分布模型一起评估了气候变化的巨大影响,并且已经对智利领域中最大程度地影响的树种进行了辅助的辅助迁移实验。入侵物种:陆地生态系统的主要风险一直是松树后松树和相思物种的优势增加。我们的控制计划将重点放在高度保守的价值领域上,这是重中之重。我们还监测了由野猪(SUS SCROFA)引起的犀牛darwinii的栖息地损害,这些野猪已成为美国的野生动物,并监测了其他可能导致生态系统发生重大变化的入侵物种,尽管到目前为止没有重大影响。自然资源的过度开发:使用快速生长的森林作物减少了Naɵve森林的木材压力,这有助于遏制他们一个多世纪以来遭受的毁灭。Polluɵon:Arauco具有有关空气,水和土壤Polluɵon的严格严格的纤维纤维标准。添加,我们在Arauco的保护区中跟踪非木林森林产品的collecton和访客的携带能力,未检测到nega的影响。以及相关的监测,未检测到Naɵve物种和生态系统的影响。同样适用于工厂,在空气和水中都对Mulɵple化合物进行监测及其在我们运营的生态系统上的影响。