XiaoMi-AI文件搜索系统
World File Search SystemDAR
DAR 2024 年 2 月.xlsx
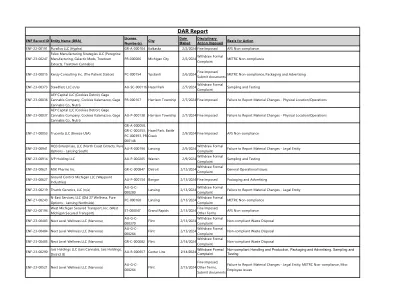
ENF-21-00266 3843 Euclid, LLC PR-000098;AU-P-000106 贝城 2/23/2024 罚款 一般运营问题、METRC 不合规、不合规处理和生产、包装和广告、抽样和测试
国防采集雷达(DAR)
USAF 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际直销 国际直销 USAF (FMS) 国际 国际直销 USAF 国际 (FMS) 国际 (FMS) 国际直销 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际 (FMS) 国际直销 国际直销
2024 年 11 月 DAR 报告
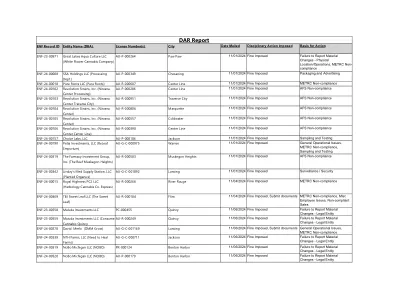
ENF-24-00519 NoBo Michigan LLC (NOBO) PR-000124 Benton Harbor 11/06/2024 罚款 未报告重大变化 - 法人实体 ENF-24-00520 NoBo Michigan LLC (NOBO) AU-P-000179 Benton Harbor 11/06/2024 罚款 未报告重大变化 - 法人实体

次级厌氧消化的简介...
•博士学位南佛罗里达大学(USF)的主管:六博士学位研究生(两名获得了博士学位,现在在该领域聘用)•研究主管,本科生的研究经验(REU) @ USF:三名REU学生•研究主管•研究生,大满贯研究生研究:六个本科生•研究生•首席组织者,重点主题委员会委员会领导人委员会及20222222222222222222222222. 2022 MMM- INTERMAG联合会议•IEEE Magnetics Society,2017年技术委员会成员 - ••2021年APS March会议,GMAG单位•会议主题委员会成员,GMAG单位•会议主席兼编辑,联合Intermag和Magnetism and Magnetism and Materigation Conference,2019年。。南佛罗里达大学(USF)的主管:六博士学位研究生(两名获得了博士学位,现在在该领域聘用)•研究主管,本科生的研究经验(REU) @ USF:三名REU学生•研究主管•研究生,大满贯研究生研究:六个本科生•研究生•首席组织者,重点主题委员会委员会领导人委员会及20222222222222222222222222. 2022 MMM- INTERMAG联合会议•IEEE Magnetics Society,2017年技术委员会成员 - ••2021年APS March会议,GMAG单位•会议主题委员会成员,GMAG单位•会议主席兼编辑,联合Intermag和Magnetism and Magnetism and Materigation Conference,2019年。•成员,高级光源外部审查委员会DOE三年期审查,2021年7月26日至29日•外部审查委员会成员,《批判性决策-2审查》高级光子源升级(APS-U)项目,Argonne,IL,2018年。•出版物主席,第12届国际同步辐射仪器会议(SRI2015),纽约,纽约,2015年7月6日至10日。
校正:...
©作者2025。Open Access本文是根据Creative Commons Attribution 4.0 International许可获得许可的,该许可允许以任何媒介或格式使用,共享,适应,分发和复制,只要您对原始作者和来源提供适当的信誉,请提供与创意共享许可证的链接,并指出是否进行了更改。本文中的图像或其他第三方材料包含在文章的创意共享许可中,除非在信用额度中另有说明。如果本文的创意共享许可中未包含材料,并且您的预期用途不受法定法规的允许或超过允许的用途,则您需要直接从版权所有者那里获得许可。要查看此许可证的副本,请访问h t p p://c r e a t i v e c o m m o ns。or g/l i c e n s e s/b y/4。0/。Creative Commons公共领域的奉献豁免(H T P://C R E A T I V E C O M M M M M M M M O M M M M M O M M M O M M M O R G/P U B/P U B L I C D O M A I N/Z E R O/1。0/1。0/)适用于本文提供的数据,除非在该文章中提供的数据可用。

dar:在
1-西班牙巴塔罗纳的Irsicaixa; 2-维克大学-Universitat Central de Catalunya,VIC,西班牙; 3-精密医学抗菌素抗药性Mepram,ISCIII,马德里,西班牙; 4-西班牙马德里的ISCIII的持续covid reicop的ciber; 5-传染病Ciberinfec,ISCIII,马德里,西班牙; 6-西班牙巴塞罗那市巴塞罗那市自动大学(UAB); 7-西班牙维克(VIC)的维克大学(VIC-Universitat De Catalunya中央); 8-案例西部病理学系全球卫生与差异中心。 div>预备大学,美国俄亥俄州克利夫兰; 9 -Fundaciólluita针对Les Infecions,大学医院德国人Trias i Pujol,西班牙巴达洛纳; 10-西班牙巴塔罗纳大学德国人Trias I Pujol的传染病系
2023 年可持续发展报告 - 达累斯萨拉姆
报告特别提到了全球报告倡议通用标准,该标准被广泛认可为可持续发展报告的框架。报告还引用了达累斯萨拉姆证券交易所 (DSE) 的可持续发展报告指南,表明该银行致力于提高业务透明度和问责制。此外,报告还引用了坦桑尼亚中央银行 2022 年《气候相关金融风险管理指南》,强调了该银行对气候相关金融风险的认识和积极应对方法。所有这些信息都是对我们 2023 年年度报告中公布的详细信息的宝贵补充,为利益相关者提供了对我们可持续发展议程和风险管理实践的全面了解。

抗体 - 药物结合物的抗体比(DAR)(ADC
为了确定T-DM1的DAR,使用Zenotof 7600系统进行了糖基化和去糖基化形式的完整质量测量。在高分辨率TOF MS光谱中观察到了两种形式的T-DM1的复杂电荷状态分布(图2A和2D)。来自生物制剂Explorer软件的完整蛋白反向溶液的结果表明,糖基化的T-DM1的复杂MS谱由不同的Glycoforms组成,这些糖基型(包括G0F,G1F和G2F)(与多达8个分子的有效载荷DM1(图2B和图2B和2B和2C)相结合。通过比较,去除N连接的糖基化导致了更简单的MS曲线(图2D – F),其中检测到携带8 dm1的脱脂化T-DM1。用<10 ppm的质量精度鉴定了两种形式的T-DM1形式,并通过Biologics Explorer软件自动集成。图3显示了T-DM1的糖基化和退化形式的DAR分布。在这两种情况下,主要的T-DM1物种的DAR值为2-4(图3)。

印度高级专员公署,坦桑尼亚达累斯萨拉姆
2.0 详细工作范围 (BOQ) 附于附件 -1。2.1 招标文件应附在规定的附件中,密封在信封中,并注明工作名称等,寄给下列签名人。2.2 招标文件可从印度高级专员公署国防顾问办公室获取,地址:213/51 Shabaan Robert Street,P.O.Box 2684,达累斯萨拉姆,电话。+255 22 2113094 电子邮件:hoc.desalaam@mea.gov.in 2.3 招标文件应于 2025 年 1 月 4 日至 2025 年 1 月 27 日下午 3 点前供申请人领取。也可以从 www.eprocure.gov.in 和使团网站 www.hcindiatz.gov.in 下载招标书。3.0 招标文件应放在密封的信封中,信封上应写明工作公司名称和联系方式等。密封的信封应寄往印度驻达累斯萨拉姆高级专员公署总务处处长。文件将在 2025 年 1 月 27 日 15:00 前收到,并将于当天 15:30 时打开。4.0 如果申请人提供的任何信息在后期被发现不正确,他/她将被禁止参与招标程序。印度高级专员公署保留独立核实申请人提供的详细信息的权利。5.0 印度驻达累斯萨拉姆高级委员会保留在合同授予之前的任何时间拒绝任何投标、取消招标程序和拒绝所有投标的权利,而无需对投标人承担任何责任。
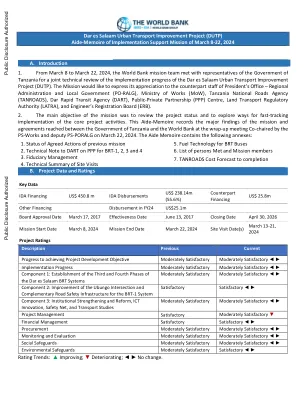
达累斯萨拉姆城市交通改善项目(...
3. 项目实施进度和发展目标的评级仍为“中等满意”。尽管乌邦戈立交桥已于 2020 年 12 月完工,快速公交 (BRT-3) 道路工程第三阶段有望于 2025 年 3 月完工,但 BRT-4 工程的实施被推迟。BRT-4 道路工程合同面临的挑战包括 (i) 三个承包商的动员延迟,以及 (ii) 两个 BRT-4 公交车站的场地不可用,因为 Mbuyuni BRT 车厂场地的预算尚未公布,DART 和乌邦戈市政府关于收购“Simu-2000 BRT 车厂”场地的谈判尚未结束。不过,BRT-1 公交运营商的公私合作 (PPP) 采购工作取得了良好进展,因为 PPP 指导委员会已批准恢复与之前中标的投标人之间陷入停滞的 2023 年 4 月合同谈判,目前预计谈判将于 2024 年 4 月 30 日完成。此外,BRT-2 的 PPP 招标策略以及为 BRT-3 和 BRT-4 构建 PPP 运营的 IFC 合同预计均将于 2024 年 4 月 30 日完成。