XiaoMi-AI文件搜索系统
World File Search SystemDVS


热泵 - 想想东芝。想想可靠性。 - DVS
dvs.co.nz › 上传 › 2021/07 › 东芝... PDF 2021 年 7 月 31 日 — 2021 年 7 月 31 日 考虑可靠性。... 采用数字技术,提供卓越的控制和 ... 温度控制、操作模式选择和出风口
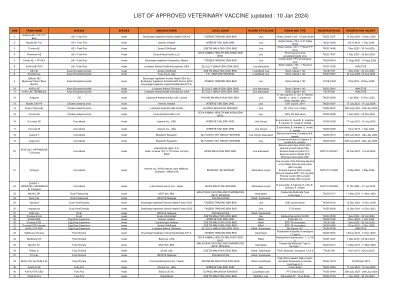
清单批准的疫苗的副本(2024年1月2日)v1.xlsx
27 DVE-VAC DVE DVE AVIAN VRI DVS DVS DVS DVS马来西亚bhd。直播CC 34195 TACB 25/09 2023年11月1日至2026年10月30日bhd。BC -14 TACB 03/90 2023-2023-2028 30出版SDN SDN综合征综合征。bhd。call EDS '76菌株病毒TACB 1/88 2023年11月1日至2026年10月30日bhd。编辑编辑1026/88 32 12月3日12月3日2020年12月3日 - 2025年12月2日32 Avipro 1bhd。call

IR-110 A 熔接机宣传册 EN
融合因子 f S ≥ 0.80 融合数据存储最少 2500 次融合(协议、标签和视频文件) 机器重量/含运输箱 130kg / 250kg 运输箱尺寸 长 x 宽 x 高 1.0 x 0.8 x 1.35 m 符合性/标准 DVS 2007-6、DVS 2203-1 符合 2006/42/EC (MD) + 2004/108/EC (EMC) 应用专为工业应用和洁净室条件而设计的融合机全装备机器的采购订单号(带工作台)790.164.001
现实世界的瞬时立体声深度估计...
立体声或基于多视图事件的数据集:DVS立体声[Andreopoulos,Alexander等。(2018)]MvSec[Zhu,Alex Zihao等。(2018)]DSEC[GEHRIG,MATHIAS等。(2021)]DHP19[Calabrese等。(2019)]
在大脑中编辑现实——NET
虚拟现实 (VR) 和增强现实 (AR) 等最新信息技术使我们能够创建可与之交互的模拟感官世界。使用编程语言,数字细节可以叠加到我们环境的显示上,混淆真实与人工设计的内容。自然语言,特别是在日常和催眠环境中使用直接言语暗示 (DVS),也可以操纵我们自己和他人的物体和事件的意义和重要性。在这篇评论中,我们重点关注社会奖励语言如何构建和影响现实。语言是象征性的、自动的和灵活的,可用于增强身体感觉,例如肢体沉重感或暗示不存在的颜色。我们引入术语“暗示现实”(SR) 来指代语言,特别是 DVS,在构建、维护和操纵我们共同的现实方面发挥的重要作用。我们还提出了“编辑现实”这一术语,以涵盖信息技术和语言技术的更广泛影响,这些影响会导致主观体验发生改变,并回顾其在临床环境中的使用,同时承认其局限性。我们开发了一个认知模型,表明大脑的中央执行结构如何在主观意识中使用我们个人和基于语言的叙述,主张语言在 DVS 中发挥核心作用。更好地了解 VR、AR 和 SR 的特点及其在日常生活、研究和临床环境中的应用,可以帮助我们更好地理解我们自己的现实以及如何编辑它。

尖峰情绪:使用尖峰神经网络识别动态视觉情感1 Binqiang Wang 1,2,Gang Dong 2*,Yaqian Zhao 2,Rengang Li 2
1山东大规模信息技术研究所,中国2个州主要的服务器和存储技术启动(北京)电子信息行业有限公司,中国北京,中国北京的抽象情感识别来自视觉信息的抽象情感识别是计算机视觉社区的重要研究主题。基于人工神经网络(ANN)的当前普遍解决方案表现出很高的精度,但计算消耗量很大。与ANN相比,尖峰神经网络(SNN)在生物学上更现实,并且在计算上有效。但是,将SNN用于视觉情感识别仍然是一个巨大的挑战,这主要是由于缺乏动态视觉传感器(DVS)的情感数据集和正确设计的SNN框架。在本文中,我们提出了一种生成DVS模拟数据集的方法,利用存在的情感识别数据集包含视频段。同时,采用了SNN框架及其对应ANN,以分别基于模拟DVS数据集和原始帧数据来完成动态视觉情感识别。所提出的SNN框架由一个功能提取模块组成,该模块基于输入的尖峰训练,投票神经元组模块,其中包含两组情绪神经元,以及一个将情感映射模块转换为情感上的尖峰到情感极性标签。结果表明,与ANN相比,提出的SNN可以实现更好的性能,其能耗只是ANN的四分之一。关键字峰值神经网络;动态视觉传感器;情绪识别1。简介

dmr:视觉增强学习中的框架和事件融合的分解多模式表示
我们使用两种互补视觉方式探索视觉增强学习(RL):基于框架的RGB凸轮和基于事件的动态视觉传感器(DVS)。iSTING多模式视觉RL方法在有效提取与任务相关的信息时经常遇到挑战。为了解决这个问题,我们提出了用于视觉RL的分解多模式表示(DMR)框架。它将输入分为三个不同的组成部分:与任务相关的效果(共同功能),RGB特异性噪声和DVS特异性噪声。共同创作表示与RL任务相关的两种模式中的完整信息;这两个噪声组件都受到数据重构损失以避免信息泄漏的约束,与共同创作形成对比,以最大程度地差异。广泛的经验表明,通过明确分开不同信息的类型,我们的方法可实现与最先进的方法相比,实质性改善的政策绩效。

界面对环氧树脂-SiO2 复合材料中有效水分扩散的影响
环氧树脂模塑料 (EMC) 用于保护集成电路 (IC) 免受环境影响,其中之一就是水分侵入,从而导致腐蚀。为了获得所需的热性能和机械性能,EMC 需要大量 (二氧化硅) 填料,从而引入大量界面。虽然硅烷偶联剂可以促进良好的粘合,但它们已证明会引入界面体积,从而在玻璃纤维填充的环氧树脂中表现出环氧树脂和 SiO 2 之间更快的水分传输。在这项工作中,我们研究了 EMC 中的填料颗粒是否也引入了这种界面体积,以及它是否会影响复合材料的水分扩散系数。我们将动态蒸汽吸附 (DVS) 进行的水分吸收测量与有效介质理论的预测进行比较,以及基于我们的样品的微 CT 扫描的数值模拟,用于包含不同填料水平的模型环氧树脂系统和具有两种不同填料水平的商业 EMC 样品。从测量的 DVS 数据中,我们观察到有效扩散系数高于 EMC 和模型系统不存在任何界面时的预测值。这表明应该存在一个界面层。

机器人绘画的神经形态电子艺术家
摘要 - 计算机视觉和深度学习方面的进步导致人们对Ai-Art的领域的兴趣激增,包括数字图像创建和机器人辅助绘画。传统的绘画机依靠静态图像和offl ine处理来将视觉反馈纳入其绘画过程中。但是,这种方法并未考虑绘画的动态性质,并且无法将复杂的重叠模式分解为单个笔触。作为基于框架的RGB摄像机的替代方法,神经形态摄像机通过异步事件流捕获场景中光强度的变化,有望克服传统计算机视觉技术的某些固有局限性。在此项目中,提出了一种用于物理绘画的机器人系统,该系统利用了动态视觉传感器(DVS)摄像机的基于事件的视觉输入。为了利用摄像机的超低潜伏期和稀疏编码,该建议的系统还采用了基于事件的信息处理,并在神经形态Dynapse-1处理器上使用尖峰神经网络实现。机器人系统接收DVS感官数据,它代表了笔触的轨迹,并计算了所需的关节速度,以闭环方式用6多F的机器人臂重新创建中风。控制器还将触觉反馈从力量扭转传感器集成在一起,以动态调整末端exector的距离,这取决于刷子的变形。在项目范围内,进一步证明了如何从DVS数据中提取有关感知的笔触中风的速度信息。该系统在现实世界中进行了测试,并成功生成了物理笔触的集合。提出的网络是迈向完全尖峰的机器人控制器的第一步,能够无缝融合基于事件的感觉反馈,从而提供超低潜伏期响应能力。除了在机器人辅助绘画中的实用性之外,开发的网络还适用于需要实时自适应控制的任何机器人任务。