XiaoMi-AI文件搜索系统
World File Search SystemDemonstrator

管腔演示器 - 项目概述
dlrs太空推进研究所拥有与火箭发动机推室设计方面相关的实验研究的长期遗产。由于欧洲的传统关注欧洲的LOX/氢气推进系统,例如沟渠,HM-7B或Vinci,因此科学焦点被放在LOX和氢气的高压燃烧现象上。感兴趣的科学领域包括点火和瞬态,燃烧效率和动力学以及喷油器设计,燃烧室冷却,喷嘴流以及推力室结构和疲劳寿命。在欧洲研发测试台P8上使用各种测试标本进行了与高压燃烧相关的实验,该试验具有在代表典型火箭发动机的条件下进行测试的可能性[3]。自2014年以来,DLR也在涡轮机械领域建立能力。基于这些现有能力和测试功能,DLR于2017年启动了Lumen Bread Engine项目,其主要目标是:促进对发动机流程的理解,以系统级别展示能够预测
心理学示范博士生奖学金
2 个全额资助的 4 年期 IoPPN/MRC 博士生奖学金 示范生奖学金为期 4 年。成功申请者将获得 4 年的博士学位,国内/欧盟申请者的费用由学院全额资助。海外申请者必须自行支付差额。示范生将获得整整四年的津贴,相当于 RCUK 为研究生提供的津贴。我们正在寻找有兴趣在核心本科团队成员的监督下进行博士研究的毕业生,并担任教学发展角色,以协助国王学院的本科心理学学位课程。除了满足博士研究生的要求外,示范生每年还将花费 20% 的时间进行教学学术的个人发展(包括课堂教学、评估和行政职责)。这些职责的具体内容将与项目主任商定,并反映本科教学的需求以及示范生的专业知识和发展目标。入学要求

FLEXOP 演示飞机的地面测试
本文介绍了对 FLEXOP 演示飞机进行的地面测试活动。进行的测试分为结构、飞行系统和集成测试。除了描述测试设置和测试执行之外,还给出了主要发现和结论。结构测试包括静态、地面振动和适航性测试。静态和地面振动测试用于对制造的机翼和整个机身进行结构表征。本文还介绍了用于机翼形状和负载重建的光纤布拉格应变传感系统的评估和校准。适航性测试用于证明制造的机翼在指定极限载荷下的结构完整性。在飞行系统测试的背景下,简要介绍了机载自动驾驶仪硬件软件系统的主要组件,包括从 RC 发射器到飞机控制器的信号数据流、基线自动驾驶仪软件的功能以及与地面站的通信。所有这些组件都集成到硬件在环环境中,并简要介绍了伺服电机识别和硬件延迟测量。在设计基线和颤振控制器时考虑了测量的硬件延迟。在软件在环环境中,颤振控制器与基线控制器一起进行了测试。最后介绍系统集成测试。在此背景下,介绍了空气制动器、发动机、电子元件的兼容性、航程和滑行测试。

用于互操作性的能力概念演示器...
1.2.1 本体定义 1-2 1.2.2 互操作性级别 1-3 1.2.3 可调自动化 1-4 1.2.4 多机器人协作 1-6 1.3 现有标准化举措分析 1-8 1.4 互操作性标准 1-9 1.4.1 服务集 1-9 1.5 互操作层:库 1-12 1.5.1 JAUSRobot 1-13 1.5.2 JAUS C2I 1-13 1.5.2.1 JAUS 车队处理器 1-14 1.5.2.2 JAUS 机器人处理器 1-14 1.5.2.3 通信管理 1-14 1.6 单个平台适配 1-15 1.6.1 ROS 到机器人节点 1-15 1.6.2 其他机器人适配器 1-16 1.7 现场验证:多机器人合作示例 1-18 1.7.1 合作式多阶段空中监视 1-19 1.7.2 空中侦察以进行可穿越性分析 1-19 1.7.3 受害者搜索 1-21 1.7.4 载体 1-23 1.7.5 通信中继 1-24 1.7.5.1 2015 年欧洲马拉松赛期间的空中、海上、地面合作 1-25 1.8 结论和致谢 1-26

下一代运载火箭航空电子设备演示器
此外,跟踪通信系统从以消息为中心的模型到以数据为中心的设计的演变似乎很有趣。在以消息为中心的架构中,通信系统无法识别其携带的消息中嵌入的数据。相反,以数据为中心的设计可以表示为全局虚拟数据库,应用程序可以访问它而不必担心系统的分布式方面。“智能遥测”概念也遵循这种以数据为中心的设计。例如,传感器可以以 100Hz 的频率获取数据,但只有当变化大于预定义的限制时才更新虚拟化数据,从而避免通信系统中的瓶颈点。
城市中的自然:生态过渡的示威者
并在主要行星余额的规模上减轻他们的负面影响。接下来,研究和创新可以在增加城市中自然存在并更好地整合自然的挑战中发挥重要作用。虽然种植一棵树可能相对容易,确保其在中期和长期内的生存要复杂得多:在城市环境中,需要众多条件,这需要尤其困难,并且需要知识,技能,数据和专业工具。在试图最大化“自然”可以为“城市”提供的生态系统服务时,这些要求甚至是奇特的,并计算了每个巨大现实中每个综合的众多相互作用。因此,在城市中成功发展自然并不简单:它需要与大量科学学科有关的技能,以及来自各种利益相关者的创新能力。
负责任的道德 AI 演示者的要素......
摘要 — 为了在这个日益脆弱的世界中保护共同的文化遗产、个人自由和法治,民主国家必须能够在必要时“以机器速度”保卫自己。因此,人工智能在国防中的使用包括负责任的武器交战以及后勤、预测性维护、情报、监视或侦察等军事用例。这就提出了一个永恒的问题:如何根据公认的事实做出正确的决定?为了找到答案,负责任的可控性需要转化为系统工程的三个任务:(1)以人类在心理和情感上能够掌握每种情况的方式设计人工智能自动化。(2)确定技术设计原则,以促进人工智能在国防中的负责任使用。(3) 保证人类决策者始终拥有充分的信息、决策和行动选择优势。这里为防空提出的道德人工智能演示器 (E-AID) 正在铺平道路,让士兵尽可能真实地体验人工智能在瞄准周期中的使用以及相关的压力方面。
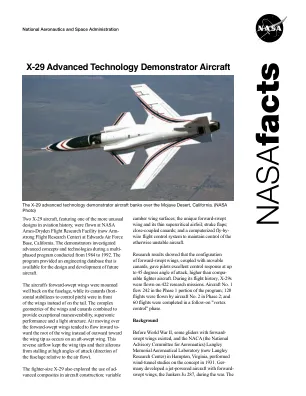
X-29高级技术演示器飞机
总体而言,VFC与前扫除的翅膀一样,对飞机设计的未来显示了希望。X-29并未证明早期研究表明的空气动力学阻力的总体减少。X-29程序确实展示了几种新技术以及已验证的技术的新用途,包括用于控制结构差异和使用相对较大的,近距离耦合的牛排进行纵向控制。此外,该计划还验证了对具有极端不稳定的飞机的控制,同时仍提供良好的处理质量;使用三表面纵向控制;以超音速速度使用双呈拖尾边缘flaperon;高攻击角度的控制有效性;涡流控制;和整体设计的军事效用。

量子机器学习与安全——演示者
在研究 [1] 中,我们研究了针对 QML 的不同类型攻击。这些攻击可以归类到 QML 管道的不同阶段——从数据收集、预处理到训练、测试再到应用(参见 [1] 第 9 节)。如今,所谓的对抗性攻击在攻击者中很流行,因为被攻击的模型保持完整,这使得攻击很难被发现。更准确地说,数据被操纵是为了故意操纵模型在应用阶段的输出,使其行为符合攻击者的利益(打开后门、进行所需的错误分类等)。在 [1] 的第 11.2 节中,我们还在量子机器学习的背景下考虑了此类攻击,并得出结论,QML 容易受到对抗性攻击,就像传统 ML 的情况一样,并确定了研究问题。QML 对数据噪声的固有鲁棒性提出了一个有趣的研究问题。将恶意操纵的数据重新解释为特定类型的噪声,人们可能想知道 QML 方法是否比传统 ML 更能抵御这种攻击类型。事实上,恶意引入的错误的传播在 QML 中的行为与在传统 ML 中的行为不同(参见 [1],第 11.2 节)。这促使我们从实际角度更深入地研究稳健性。
阿格尼班亚轨道技术演示器(SOrTeD)
它与减材制造相反,减材制造使用铣床等设备切割/挖空一块金属或塑料。3D 打印传统上用于原型设计,在制造假肢、支架、牙冠、汽车零件和消费品等方面具有广泛的应用。