XiaoMi-AI文件搜索系统
World File Search SystemDept
能源部活动手册
人人都需要能源。但是,我们生产和使用能源的某些方式会对环境产生巨大影响。这本《能源意识活动手册》提供了许多线索和提示,教您如何做出明智的能源选择、节省资金并减少对环境的影响。在开始之前,请牢记以下几个概念。能源素养:能源素养是指了解能源在我们生活中的性质和作用,以及运用这种了解来回答问题和解决问题的能力。这本活动手册可帮助您回答问题和了解能源。能源效率:我们使用的 90% 以上的能源来自不可再生且会造成污染的化石燃料。我们手头上最宝贵的能源资源之一就是能源效率,即本来会被浪费的能源。选择最节能的设备。寻找 ENERGY STAR ® 标签。可再生能源:可再生能源不会污染环境,并且可以不断补充。以下是当今正在使用的一些主要可再生资源:

门要求 - 7502 号楼消防局
(各 1 个) 13'-11" x 19' Haas CHT-2016A 隔热分段门;R 值 18;杏仁色 V 型槽面板;(4) 25" x 12" 3/4" 隔热钢化透明窗户,位于第 2、3、4 和 5 部分,带黑色窗框;3" 正常净空倾斜间距匹配轨道 (4/12);聚酯耐磨带;橡胶头密封件和引擎盖挡板;乙烯基导向密封件
高级通信实验室ECE ...
part-B:使用Scilab/Matlab/simulink或LabView1。模拟NRZ,RZ,半鼻涕和凸起的余弦脉冲,并生成二进制极性信号传导的眼图。2。模拟脉冲代码调制和解调系统,并显示波形。3。模拟QPSK发射器和接收器。绘制信号及其星座图。4。通过模拟二进制DPSK的非连锁检测来测试二进制差分相移键系统的性能。
评估清单 - 部门联系人06052024(7).xlsx
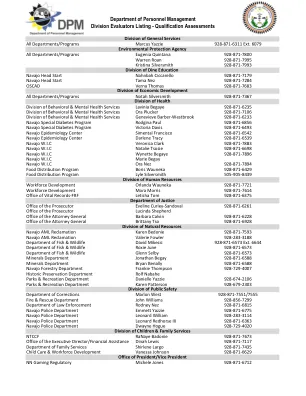
Division of Behavioral & Mental Health Services Lavinia Begaye 928-871-6235 Division of Behavioral & Mental Health Services Ora Plucker 928-871-7106 Division of Behavioral & Mental Health Services Genevieve Barber-Westbrook 928-871-6233 Navajo Special Diabetes Program Rodgina Paul 928-871-6856 Navajo Special Diabetes Program维多利亚·戴维斯(Victoria Davis)928-871-6493纳瓦霍(Navajo)流行病学中心模拟弗朗西斯科(Francisco)928-871-6542纳瓦霍(Navajo 928-871-6698 Navajo W.I.C Wynette Begaye 928-871-7896 Navajo W.I.C Marie Begay Navajo W.I.C Ora Nez 928-871-7894食品分配计划Boris Wauneka 928-871-6429食品分配559-95
实验室部:化学测试名称:雌二醇
测试适应症:●女性中的性腺功能不全和寡核酸的评估。●评估辅助生殖方案(例如体外受精)的卵巢状态,包括卵泡发育。●结合黄体生成激素测量,监测性降压前妇女的雌激素替代疗法。●男性对女性化的评估,包括妇科疗法●诊断男性和女性的雌激素产生肿瘤的肿瘤●●作为性类固醇类固醇代谢的可疑疾病的诊断和检查的一部分绝经后妇女断裂风险评估的密度测量●监测抗雌激素治疗(例如芳香酶抑制剂治疗)


OEC 754 医疗电子 CIT 1 ECE 系...
内窥镜是一种管状光学仪器,用于检查或观察通常肉眼无法看到的体腔。内窥镜的设计便于消毒。在内窥镜中,物体端有物镜和棱镜组件,观察端有目镜。内窥镜图像可以用彩色胶片和录像机记录下来。10. 远程医疗的基本参数是什么?
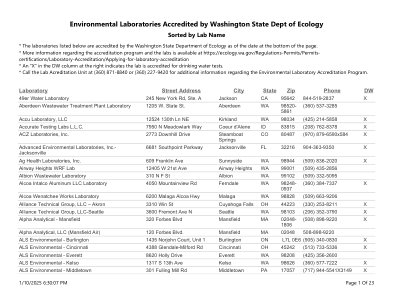
华盛顿州生态部门认可的环境实验室
* 截至本页底部的日期,下列实验室已获得华盛顿州生态部认证。 * 有关认证计划和实验室的更多信息,请访问 https://ecology.wa.gov/Regulations-Permits/Permits- certifications/Laboratory-Accreditation/Applying-for-laboratory-accreditation * 右侧 DW 列中的“X”表示实验室已获得饮用水测试认证。 * 请致电实验室认证部门 (360) 871-8840 或 (360) 227-9420,了解有关环境实验室认证计划的更多信息。
2020年11月20日,BSE公司有限公司...
印度国家证券交易所有限公司上市部交易所班德拉·库拉(Bandra Kurla Complex),孟买400 051 SUB:根据SEBI第30条的披露(上市义务和披露要求)条例,2015年(“法规”)(“法规”)(“法规”),根据规定的适用规定,在下面的规定中,