XiaoMi-AI文件搜索系统
World File Search SystemDiff
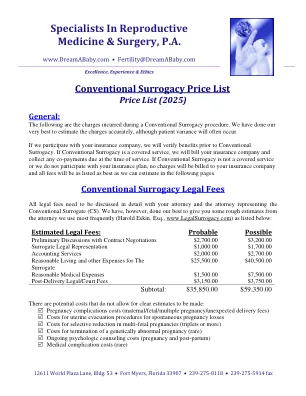
常规代孕价格清单
Surrogate Screening Tests: Probable Possible HIV (Human Immunodeficiency Virus)* $105.00 HBsAg (Hepatitis B) * $99.00 HCsAb (Hepatitis C) * $59.00 RPR (Syphilis) * $49.00 DNA Gene Probe (Gonorrhea & Chlamydia) * $139.00 CMV Total (Cytomegalovirus) $104.00 ABO RH(血型)$ 39.00抗体屏幕$ 55.00 Rubella ab IgG $ 129.00 Rubella疫苗接种(如果不能免疫)(注射套件)$ 142.00 VARICELLA(Chicken Pox)Varicella疫苗接种(Injection X2 incection x2 incl。)$ 377.00孕酮$ 140.00 cbc w/diff $ 48.00电解质$ 42.00 FSH(卵泡刺激激素)$ 140.00 counsyl遗传测试†$ 550.00尿液药物筛查$ 83.00 Venipuncture(x3)上面的“*”测试每六个月重复一次,以确保
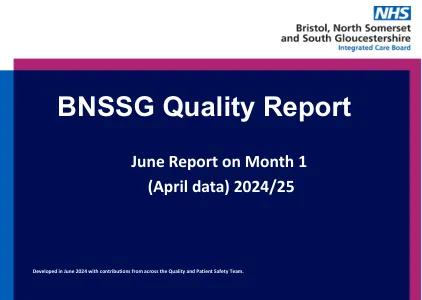
BNSSG质量报告
BSW BNSSG Devon Dorset Glos Kernow Somerset SW England BNSSG C. diff 29.88 29.12 32.04 33.69 31.62 42.04 31.00 32.25 27.43 1 E. coli 58.44 54.83 84.50 87.16 37.08 79.93 83.61 69.49 68.66 2 MRSA 1.73 3.21 1.26 1.95 0.44 1.16 1.17 1.66 1.48 7 MSSA 20.60 20.42 29.68 26.68 26.73 14.04 29.25 29.25 29.32 29.32 24.32 24.32 21.91 2 PSEUD A 7.95 5.58 5.58 5.58 5.50 5.50 5.91 3.69 5.91 3.69 5.82 7.04 6.36 6.36 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 7.26 3.26 7.26 3 k le 25.88 16.55 23.76 25.13 20.46 21.27 2

评估气候变化的空气温度变化和降水对植物生理和土壤微生物过程的影响Wi
使用DNDC(denitrifi阳离子分解)模型(版本9.5)来预测多年生草的蒸腾和光合作用速率(红三叶草和提摩太教)的差异,以及一种砂质苏普固醇的自亲呼吸。在模型实验中使用了两个生长季节的输入参数(从2010年5月1日至2015年8月31日至2015年8月31日)。在2010年,该周期的平均空气温度为14.1±3.3°C,总降水量为0.1796 m,而在2015年,平均空气温度为16.8±5.5°C,总降水量为0.538 m。这些气象参数对2010年的植物不利,2015年有利。结果表明,DNDC模型充分预测了多年生草的总和平均蒸腾率的天气引起的差异:0.12204 m。和0.00099±0.00040 M.Day -1分别在2015年有利的气象条件下和0.05969 m。和0.00049±0.00035 m.day -1,在2010年不利的气象条件下。植物的每日蒸腾率的动力学显着(r = 0.34 p <0.001)与土壤水含量仅在不利的气象条件下相关。模拟光合作用速率的平均值等于2015年的84.4±27.9 kg.c.c.hha -1。天-1,2010年52.3±23.4 kg.c.hha -1 .day -1 .day -1 -1在2010年。在两种天气情况之间的光合作用速率的平均值中存在显着的差异(p <0.001)。单向方差分析(ANOVA)的结果表明,在有利的(8.14±2.25 kg.c.h -1 .day -1)下,自养呼吸的速率比不利(8.14±2.25 kg.c.ha -1 .day -1)高于不利(5.17±2.17±2.19±2.19±2.19 kg.c.c.ha -1 .day -1 .day -1 .day -1)。
伊曼纽尔·米勒在线会议2025
多样性与平等声明英国心理治疗委员会(UKCP)促进了与差异的积极参与,因此试图为心理治疗和心理治疗咨询专业提供框架,从而使竞争,多样化的思想和观点与人性化,尊重,尊重和价值的含义。UKCP致力于解决与精神福祉,政治信仰,性别和性别认同,性偏爱或倾向,残疾,婚姻或伙伴关系,种族,国籍,民族,种族,宗教身份,宗教认同或精神认同,年龄或社会经济阶级和个人和团体的阶级,婚姻或伙伴关系状况,种族,种族,种族,种族,种族,种族,种族,种族或伙伴关系状况,种族,民族或族裔,种族或伙伴关系状况,种族,种族或伙伴关系状况,种族,种族或伙伴关系状况,种族或伙伴关系状况,种族或伙伴关系状况,种族或伙伴关系的状态,婚姻或伙伴关系状况,种族,婚姻或伙伴关系状况。UKCP保留其政策和程序正在审查中,以确保歧视,排斥,压迫和疏远的现实可能构成其成员以及客户经验的一部分,并得到适当解决。UKCP试图确保使用心理治疗的实践来庆祝人类的差异和多样性,并且从来没有将心理治疗用作对任何群体或个人的强迫或压迫的手段。
法国国务秘书帕特里夏·米拉莱斯 (Patricia Miralles) 拜访了法国武装部队部长,负责罗讷河口省退伍军人和纪念事务 (13)
CDHA 成立于 1974 年,旨在响应各类人士(其中大部分是从阿尔及利亚归国)的愿望,确保他们所持有的有关阿尔及利亚 1962 年前历史的文件得到保存。
BC癌症疗法的姑息治疗摘要用于转移性乳腺癌,每周阿霉素
资格:患者必须具有:转移性乳腺癌患者应具有:ECOG表现状态0-2预期的生存率大于3个月,不包括:•不得患有:•临床上意义的心脏疾病(症状性心室心律不齐的病史(症状性心律失常的病史),在过去的12个月内或心肌梗死在前12个月内:中性粒细胞减少症和/或血小板减少症的功能障碍超过累积的阿霉素剂量的患者360 mg/m 2。添加右旋唑烷可能被认为在选定的患者中继续超出这种剂量(请参阅预防措施)。在患者中,风险:进一步的蒽环类的益处比率是一个降低的考虑因素,这是由于缺乏其他可用的治疗选项测试:•基线:CBC和DIFF,总胆红素,GGT,GGT,ALT,LDH,LDH,LDH,碱性磷酸酶磷酸酶,肌酐,回声或MUGA扫描预示:•抗敏化化学疗法的抗过敏方案(请参阅方案SCNAUSEA)
20302.pdf - 清洁
该项目的目的是使用中介平台和技术解决方案来监控和保护集装箱运输。我们的愿望是协调计划运输计划的制定(从开始到结束),确保其物理和管理监控;并根据提供的可追溯性信息确保实时合规性(并采取可能的干预措施来防止故障和任何失败风险)。我们的平台将由各种现有信息系统(港口系统、运输和港口牵引软件解决方案等)提供支持,并将受益于现场信息反馈(GPS/GPRS信标、车载IT、RFID……)并将是安全的。该平台的安全和互联社区维度将允许链中不同参与者之间更好的同步,并承担公认的责任。链条中的不同环节(例如,RFID 将促进港口码头的交换)以及整个运输链(多式联运的完整可追溯性)都将获得生产力收益。

2022 年高等教育研究人员日 - SynHERA
总体而言,相对于对称背带,背带相对于不对称背带对妈妈姿势的影响更大。我们可以肯定的是,当使用腹侧婴儿背带携带婴儿时,无论是使用预制婴儿背带还是吊带,与参考位置相比,肩膀的倾斜程度显着增加(p<0.001)。此外,50%的参与者保持左肩低于右肩,50%的参与者采取相反的策略。在携带条件下,肩部和髋部旋转角度也显着增加 (p<0.001)。大多数参与者的策略是水平向前移动右肩和右髋。请注意,显着差异与测量角度的绝对值有关,即与变化方向无关的量。两种携带方式相互比较时,没有观察到显着差异。此外,母乳喂养因素似乎也对姿势产生了影响。事实上,母乳喂养的母亲在使用吊带时身体前倾明显更加明显 (p = 0.047)。这可以用雌激素水平来解释,母乳喂养的母亲的雌激素水平不同(Lawrence & Lawrence,2011)。对称携带没有发现母乳喂养的显着影响。通过根据婴儿的中位体重(6.35 公斤)将样本分为两组来测试婴儿体重对结果的影响。没有观察到与此因素相关的显着差异。

Xiao liuXiao liu
六月研究助理。2020年 - 2024年8月•大型语言模型(LLMS)内的长期杂项机器人学习的发展状态空间建模,LLMS在维护州跟踪的同时执行计划和推理。•体现的AI:提出的diff -Control,一种将控制网络从图像生成到机器人动作的范围的动作扩散策略。[C7]•使用注意机制和可区分的过滤创建了一个多模式学习框架(𝛼 -MDF),该滤波器在潜在空间中进行多种模式的状态估计。[C5]•开发了可区分的集合Kalman过滤器(DENKF)框架,其中包含用于机器人学习的算法先验,即从观察值中学习系统dy -namics,以及从高维空间中的学习表示形式。[C4]•用智能手表部署了无处不在的机器人控制任务的智能滤波框架,即,电视,无人机驾驶。[C6]