XiaoMi-AI文件搜索系统
World File Search SystemDist
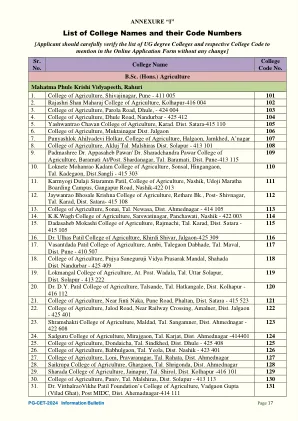
大学名称及其代码编号
58。农业学院,Amkheda Tal。 Melagus,Dist。 Washim 224 59。 P.R. pote(patil)农业学院,凯索拉,阿姆拉瓦蒂225 60。 SMT。 Wardha 226 402 301 62。 农业学院,区。 jalna-431 202 303 64。 农业学院,大使,区。 BEED-431 517 304 65。 农业学院,奥斯马纳伯·基尼(Osmanaber Kini),奥斯马纳伯(Osmanaber),区。 Osmanabad 305 66。 农业学院,塔尔·戈尔加恩。 aundha(nagnath)dist。 hingoli。 306 67。 狂热。 农业餐厅,达赫卫,塔尔。 农业学院,Naigaon Bazar Tal。 naigaon(kh。) 拉吉夫晚期 BEED 431 122农业学院,Amkheda Tal。Melagus,Dist。Washim 224 59。P.R.pote(patil)农业学院,凯索拉,阿姆拉瓦蒂225 60。SMT。Wardha 226 402 301 62。 农业学院,区。 jalna-431 202 303 64。 农业学院,大使,区。 BEED-431 517 304 65。 农业学院,奥斯马纳伯·基尼(Osmanaber Kini),奥斯马纳伯(Osmanaber),区。 Osmanabad 305 66。 农业学院,塔尔·戈尔加恩。 aundha(nagnath)dist。 hingoli。 306 67。 狂热。 农业餐厅,达赫卫,塔尔。 农业学院,Naigaon Bazar Tal。 naigaon(kh。) 拉吉夫晚期 BEED 431 122Wardha 226402 301 62。农业学院,区。jalna-431 202 303 64。农业学院,大使,区。BEED-431 517 304 65。农业学院,奥斯马纳伯·基尼(Osmanaber Kini),奥斯马纳伯(Osmanaber),区。Osmanabad 305 66。农业学院,塔尔·戈尔加恩。aundha(nagnath)dist。hingoli。306 67。狂热。农业餐厅,达赫卫,塔尔。农业学院,Naigaon Bazar Tal。 naigaon(kh。) 拉吉夫晚期 BEED 431 122农业学院,Naigaon Bazar Tal。naigaon(kh。)拉吉夫晚期BEED 431 122
比利时的第一个公共量子通信测试床
▪4种各种和成熟度级别的系统(DV/CV/MDI)▪用例演示(政府和行业)▪技术重点:自定义IP加密器,可信赖的节点设置,端到端风险和威胁评估,与PQC(auth / long Dist。)集成< / div。
ye - a-4 – 手动重新分类应收账款
应收账款项目处理器将在序列 2 的待定项目 1 选项卡中建立重新分类的应收账款项目。要创建序列 2:1 – 单击 + 添加新序列 2 – 项目 ID:[来自原始应收账款]3 – 行:输入 1 作为行,以将此项目与原始项目区分开来。注意:如果行 1 用于原始项目,则输入 2 作为重新分类的应收账款 4 – 客户 ID:[来自原始应收账款]5 – 金额:输入项目余额 6 – 输入类型:DR(用于正应收账款)7 – 原因:[使用与序列 1 相同的原因]8 – 应收账款分配默认为基于原因字段的帐户。通过单击放大镜图标,选择与序列 1 相同的应收账款分配。这应该与原始应收账款项目相匹配。9 – 单击保存。系统将分配一个组 ID。请记下源文档/内部日志中的组 ID 以供参考。


Telangana可再生能源开发公司有限公司(tgredco)===================================================================================
12 Sri G. Mahender Reddy地区经理,Warangal(Urban)Warangal(农村),Janagam,Mahaboobabad和Jayasankar Bhoopalpally教授2578613/6304903927
常识测试 – fuvest 2025
(A)连接摩尔曼斯克港至丘吉尔港的路线具有交通便利、不干扰专属经济区、避免领土冲突的优势。 (B)源自西北和东北路线的路线为该地区的国家提供了更大的地缘政治战略,这些国家将所有旅游区用作军事基地。 (C)连接鹿特丹至上海的东北航线增加了海上船队的航行距离,但未来仍可能受到冰盖扩大的威胁。 (D) 连接亚洲和美洲的西北航线是一条以其密集的海上交通、较短的距离以及经过许多商业港口和军事基地而闻名的航线。 (E)西北和东北航线带来的商业流通往往集中在白令海峡,从而减少了经由巴拿马运河和苏伊士运河的航线所要覆盖的距离。 #####
8_supply Chain Management.pdf -MFMA-国家财政部
- 从年度采购计划中征用 - 基于项目的 - 供应商旋转管理 - 参数驱动和CSD集成所需的 - 供应链偏差管理机构,就立法 - 确保市政当局的权威代表团(DOA) - 针对NTT DACABASE的divabase,divabase dival divabase divabase,divabase divabase divabase divabase ntt Divabase,/dist
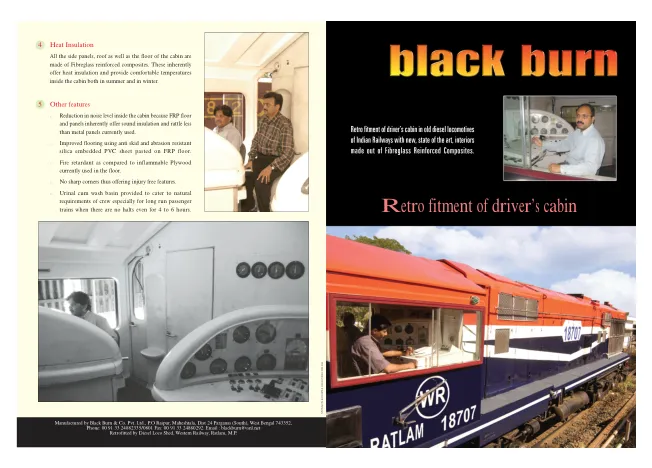
驾驶室改装 - Black Burn
制造商为 Black Burn & Co. Pvt. Ltd.,地址为 PO Raipur, Maheshtala, Dist 24 Parganas (South), West Bengal 743352,电话:00 91 33 24882335/0801 传真:00 91 33 24880292。电子邮箱:blackburn@vsnl.net 由 Diesel Loco Shed, Western Railway, Ratlam, MP 改装
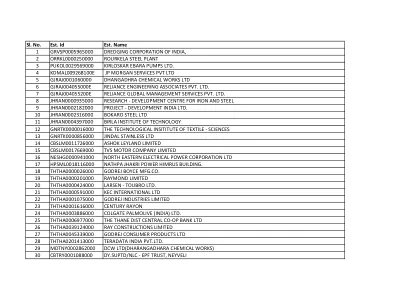
SL。SL。
SL。 编号 est。 est。 名称1 GRVSP0005965000印度疏ed公司,2 Orrkl0000250000 Rourkela Steel Plant 3 Pukol0029569000 Kirloskar Ebara ebara Pumps Ltd。 4 KDMAL009268100E JP MORGAN Services Pvt Ltd 5 GJRAJ0001060000 Dhangadhra Chemical Works Ltd 6 GJRAJ004055000E Reliance Engineering Associates Pvt。 ltd。 7 GJRAJ004055200E Reliance Global Management Services Pvt。 ltd。 8 JHRAN000000935000研究 - 铁与钢的开发中心9 JHRAN0002182000项目 - 开发印度有限公司。 10 Jhran0002316000 Bokaro Steel Ltd 11 Jhran0004397000 Birla技术研究所12 Gnrtk0000016000 NESHG000000941000 North Eastern Electrical Power Corporation Ltd 17 HPSML0018116000 NATHPA JHAKRI POWER HISRUS大楼。 18 Tha0000026000 Godrej Boyce Mfg.co。 19 THA0000201000 Raymond Limited 20 Tha0000424000 Larsen -Toubro Ltd。 21 THA000000591000 KEC International Ltd 22 Ththa000101075000 Godrej Industries Limited 23 Ththa0001616100s Century Rayon 24 THATHA0003886000 COLGATE PALMOLIVE(印度)有限公司。 25 Ththa0006977000 Thane Dist Dist Central Co-Op Bank Ltd 26 Tha0039124000 Ray构造有限公司27 Ththa0045339000 Godrej Consumper Products Ltd 28 THA02020201413000 Teradata India India India India Pvt.ltd。 29 MDTNY0002862000 DCW Ltd(Dharangadhara Chemical Works)30 CBTRY000101088000 DY.SUPTD/NLC -EPF TRUST,NEYEVELISL。编号est。est。名称1 GRVSP0005965000印度疏ed公司,2 Orrkl0000250000 Rourkela Steel Plant 3 Pukol0029569000 Kirloskar Ebara ebara Pumps Ltd。 4 KDMAL009268100E JP MORGAN Services Pvt Ltd 5 GJRAJ0001060000 Dhangadhra Chemical Works Ltd 6 GJRAJ004055000E Reliance Engineering Associates Pvt。ltd。 7 GJRAJ004055200E Reliance Global Management Services Pvt。ltd。 8 JHRAN000000935000研究 - 铁与钢的开发中心9 JHRAN0002182000项目 - 开发印度有限公司。 10 Jhran0002316000 Bokaro Steel Ltd 11 Jhran0004397000 Birla技术研究所12 Gnrtk0000016000 NESHG000000941000 North Eastern Electrical Power Corporation Ltd 17 HPSML0018116000 NATHPA JHAKRI POWER HISRUS大楼。18 Tha0000026000 Godrej Boyce Mfg.co。19 THA0000201000 Raymond Limited 20 Tha0000424000 Larsen -Toubro Ltd。 21 THA000000591000 KEC International Ltd 22 Ththa000101075000 Godrej Industries Limited 23 Ththa0001616100s Century Rayon 24 THATHA0003886000 COLGATE PALMOLIVE(印度)有限公司。 25 Ththa0006977000 Thane Dist Dist Central Co-Op Bank Ltd 26 Tha0039124000 Ray构造有限公司27 Ththa0045339000 Godrej Consumper Products Ltd 28 THA02020201413000 Teradata India India India India Pvt.ltd。29 MDTNY0002862000 DCW Ltd(Dharangadhara Chemical Works)30 CBTRY000101088000 DY.SUPTD/NLC -EPF TRUST,NEYEVELI