XiaoMi-AI文件搜索系统
World File Search SystemDrilling
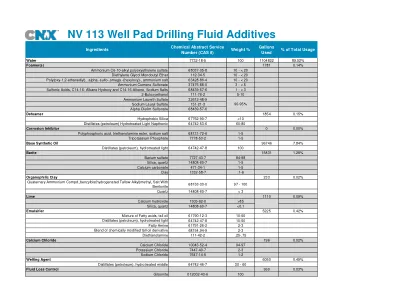
NV 113井垫钻孔液添加剂
Water 7732-18-5 100 1104822 89.52% Foamer(s) 1781 0.14% Ammonium C6-10-alkyl polyoxyethylene sulfate 68037-05-8 10 - < 20 Diethylene Glycol Monobutyl Ether 112-34-5 10 - < 20 Poly(oxy-1,2-ethanediyl), 。 2-二氧乙醇111-76-2 5-10硫酸铵32612-48-99午睡64742-53-6 60-80腐蚀抑制剂0 0.00%多磷酸,三氨基酯酯,钠盐68131-72-6 1-5磷酸三)磷酸盐7778-53-2 1-5 1-5碱基合成油96746 7.845%; 64742-47-8 100 Barite 1.28%硫酸钡7727-43-7 84-98硅,石英14808-60-7 1-5碳酸钙471-34-1 1-5 Compd。,苄基苯基(氢化牛脂烷基)甲基,盐盐68153-30-0 97-100
Golden Beach-2海上钻井环境计划摘要
项目区域包括钻井现场和钻头周围的500 m缓冲液(图2.1),因为这反映了在钻孔过程中将建立的临时石油安全区(PSZ)的范围,并且是MODU将对支撑容器进行操作控制的区域。表2.1概述了钻头位点的坐标。钻头的水深为20 m,指的是平均海平面(MSL)。
空气钻探CTA箱关闭。 10399 Associates PTE。有限公司 div>
DOE TONGONAN的认可证书,Le y Te Gresc-2009-10-认可证书001年10月注册号日期为2020年6月23日,2009年23月23日 - 2012年2月24日,由我的莱恩(Lene)2012年2月6日发行。 Capongcol,官员,可再生能源管理局(2020年6月23日的背书信),Negros Gresc-2009-1 2009-1 0-认可信证东方002的证书,日期为OBER注册号。dated June 23 , 2020 23, 2009 2014-027 dated February 12, 2014 Bacon-Manito GRESC-2009-10 - None Letter of Endorsement Sorsogon/ Alba y 003 da te d October dated June 23, 2020 23, 2009 Kidapawan City, GRESC-2 009-1 0- None Letter of Endorsement North Cotabato 004 dated October dated June 23 , 2020 23, 2009 Northern Negros,GRESC-2009-1 0-无无NEGROS西方005日期为2009年10月23日
外蒙皮飞机门手动钻孔夹具设计...
由于复杂性、工艺能力和对技术工人健康状况的影响,专用飞机部件的夹具设计如今非常具有挑战性。建议的用于钻外蒙皮飞机门的夹具设计将适应夹具设计原则和技术工人的人体工程学方面。建议的设计将包括舒适的钻孔姿势和结构有限元分析 (FEA)。讨论了钻孔过程所需的步骤,从加载、定位、夹紧、框架旋转到钻孔。FEA 分析表明,在框架和垂直支架之间的凸缘处记录的 von Mises 应力最大值为 6.373 × 105 N/m 2,并且外蒙皮飞机门的负载重量导致应力分布可接受。开发了一个功能齐全的原型,其比例缩小到四分之一以验证设计。开发的原型成功展示了夹具设计在钻飞机门外蒙皮时提供人体工程学考虑机制的能力。

工业机器人钻井过程的数字孪生框架的开发
航空航天部件(包括发动机部件或机体结构)的严格要求需要可靠的制造工艺。因此,对设备性能、产品开发和制造的持续监测、控制和优化至关重要。机械加工是航空航天部件制造中的重要制造工艺,包含不同的物理现象,如断裂、变形、散热、摩擦学和振动[1]。在机械加工工艺中,钻孔主要用于飞机结构(如机身、机翼等)的最终生产阶段,使用机械臂进行精确且经济高效的钻孔作业[2]。随着制造业通过数字化转型迅速发展,数字孪生是一项新技术,它有潜力提高机械加工效率并减少与机器人钻孔相关的缺陷。数字孪生是工业 4.0 中的一个概念,它通过从物理世界收集的数据流提供制造元素的数字化表示。这些数据用于更新数字实体,控制命令被发送回制造元素进行操作。因此,物理和数字孪生之间可以进行无缝、连续的信息交换,从而可以预测和优化制造过程 [ 3 ]。在制造环境中,数字孪生的实现方式多种多样,具体取决于所需的对象
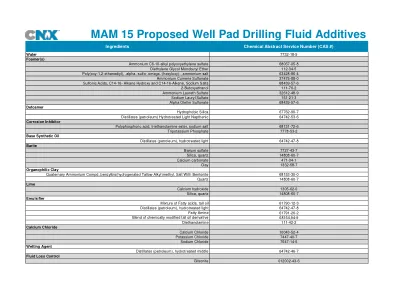
MAM 15提出的井垫钻孔液添加剂MAM 15提出的井垫钻孔液添加剂
水7732-18-5泡沫(S)C6-10-烷基聚氧硫酸盐硫酸盐68037-05-8二乙二醇单丁基单丁基112-34-5聚(Oxy-1,2-乙基) 63428-86-4碳硫酸铵37475-88-0磺酸,C14-16-烷烃羟基和C14-16-烷烯,钠盐68439-57-6 151-21-3α烯丙基磺酸盐68439-57-6 DEDOAMER疏水二氧化硅67762-90-7蒸馏(石油)氢化光核糖64742-53-53-53-5磷酸盐7778-53-2碱基合成油馏出(石油),氢化光64742-47-8硫酸盐硫酸盐7727-43-7硅,石英14808-60-7

研究双臂合作机器人在石油钻井场中的应用
1安全,环境保护以及质量监督与检查研究所,CNPC Chuanqing钻探工程有限公司,Ltd。拆卸德里克斯(钻孔)。首先,引入了双臂协作机器人的基本概念和技术背景,然后讨论了其在Derricks的组装和拆卸中的特定应用程序及其面临的挑战。最后,总结了当前研究的进展,并提出了未来的发展方向。关键字:双臂协作机器人,德里克,组装和拆卸,拆卸,工业自动化I.随着工业自动化的快速发展,各个领域的机器人技术的应用范围和深度正在不断扩大。无论是制造业,医疗保健,农业还是服务行业,机器人技术都在逐渐改变传统的工作方式和提高效率和质量。在这种情况下,双臂协作机器人是一种可以模拟人手协调运动的高级设备,已经显示出前所未有的潜力。这种类型的机器人不仅可以执行复杂的操作任务,而且还可以通过精确的同步控制和强制反馈机制实现与环境和对象的高度相互作用。但是,传统的手动操作方法在效率和安全性方面存在明显的缺点。在石油钻井行业,Derrick(钻机)拆卸Dissemembly是一项至关重要且具有挑战性的任务。DerrickofDisassemblyThe Installation and Nipysembly Process涉及大量的重型零件和高精度操作,这需要工人具有丰富的经验和高度的协调。效率低下不仅会导致更长的运行时间和增加的成本,而且可能会对整体钻井进度产生负面影响。在高风险的工作环境中,很难完全保证工人的安全,

用于水平和多边井的下一代钻孔流体:一种概念方法
下一代钻孔流体的发展对于水平和多边井的成功至关重要,这在扭矩和阻力,孔清洁困难以及井眼不稳定等方面带来了独特的挑战。本评论探讨了钻孔液的不断发展的作用,重点关注应对这些挑战所需的所需特性,包括增强的切割运输,减少扭矩和阻力以及提高了井眼稳定性。此外,本文讨论了创新的添加剂,例如纳米颗粒,高性能聚合物和可生物降解的润滑剂,这是优化流体性能的关键。环境考虑以及流体成分之间的化学和机械相互作用。最后,本文研究了钻井技术的未来趋势,强调了下一代流体的预期益处,并确定了未来研究和开发的潜在挑战。这些高级液体可以彻底改变钻井效率,同时在日益复杂的钻井环境中保持可持续性。

INPEX和JERA签名协议,共同研究日本澳大利亚CCS价值链的可行性日本GIFU县地热能开发的探索性钻探日本GIFU县地热能开发的探索性钻探
公共关系集团,企业通信部门Akasaka Biz Tower,5-3-1 Akasaka,Minato-Ku,东京107-6332日本
ENG FORM 1836A 钻井日志续表 1967 年 6 月
__ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __ __ __ ____ __