XiaoMi-AI文件搜索系统
World File Search SystemECCV
可解释人工智能(XAI)
Hendricks, LA、Burns, K.、Saenko, K.、Darrell, T.、Rohrbach, A. (2018)。女性也玩单板滑雪:克服字幕模型中的偏见。收录于:Ferrari, V.、Hebert, M.、Sminchisescu, C.、Weiss, Y. (eds) 计算机视觉 – ECCV 2018。ECCV 2018。计算机科学讲义 (),第 11207 卷。Springer, Cham。https://doi.org/10.1007/978-3-030-01219-9_47

owens-cv.pdf
专业活动共同组织者Umich AI研讨会(2024)CVPR研讨会主席(2024)首席组织者,视觉和声音研讨会,网址为CVPR 2018-2024。共同组织者,AV4D:空间工作室中声音的视觉学习,ECCV 2022,ICCV2023。共同组织者,开放世界视觉研讨会,CVPR 2021-2024。共同组织者,体现的多模式学习研讨会,位于ICLR 2021。评论者:CVPR(2015-2020,2022),ICCV(2015,2017,2019,2019,2021),ECCV(2016,2018,2018,2020,2022),Siggraph(2020,2024),Siggraph Paphaph Asia(2024),(2024),ICLR(2018,2024) (2017),Neurips(2017、2019、2021、2022),CHI(2018),UIST(2019),ACL(2022),Corl(2022),ICASSP(2023)(2023)区域主席:CVPR:CVPR(2021,2023,2023,2024,2025),Neurips(Neurips(Neurips),Neurips(2023),20222222222222222222222222222222222222222222222222222222222222222222222222222222年2月22日(neurips)(neurips datev)(neurips)( (2023),ICCV(2023),ECCV(2024)NSF小组成员(2023,2024)

Sanjeev J. Koppal
UF ECE部门教学奖(2024)琳达和肯特·福克斯教职员工(2023年至今)UF任期教授职位(2021-24)ONR夏季教职员工1(2021)NSF职业奖(2020)NSF职业奖(2020年)杰出成就计算机科学奖(2003年)USC受托人奖学金(完整学费)(1999-2003)USC本科工程研究奖(1999-2003)

职位名称:研究助理(3D计算机图形,3D计算机视觉)
研究助理有望协助团队解决基本的研究和工程问题,支持顶级计算机视觉和计算机图形会议(CVPR,ECCV,ICCV,Siggraph)和期刊(TPAMI,IJCV)的出版物。其他责任包括支持研究生或本科生进行技术实施以及参与其他研究活动,例如阅读小组,研讨会组织等。

迈克尔·J·布莱克
联合组织者,视频场景 (SfV) 研讨会,VI,巴罗萨谷,澳大利亚,2024 年 12 月。联合组织者,3D 人体基础模型,ECCV 2024 研讨会,10 月。意大利米兰。联合组织者,第五届视频场景 (SfV) 研讨会,法国香槟,2023 年 10 月。多样性、公平和包容性联合主席,ICCV 2023。咨询委员会,以人为本的值得信赖的计算机视觉:从研究到应用,ICCV 2021。联合组织者,SMPL made Simple,CVPR 2021 教程。联合组织者,CV4Animals:用于动物行为跟踪和建模的计算机视觉,CVPR2021 研讨会,2021 年 6 月。联合组织者,3D Poses In the Wild Challenge,ECCV 2020 研讨会,格拉斯哥,2020 年 8 月。联合组织者,第四届视频场景 (SfV) 研讨会,西班牙杜罗河岸,2019 年 9 月。联合组织者,第三届视频场景 (SfV) 研讨会,意大利加尔达湖,10 月2017. SIGGRAPH 课程,联合组织者,“学习运动中的人体形状”,
![arxiv:2408.08610v1 [cs.cv] 2024年8月16日](/simg/6\6c88912f88709d9cf4df75a51174ac46e7d7bafc.webp)
arxiv:2408.08610v1 [cs.cv] 2024年8月16日
摘要。本文介绍了我们在ECCV 2024上首次数据集蒸馏挑战的生成轨迹的方法。由于扩散模型已成为生成模型的支柱,因为其高质量的生成效应,我们专注于基于扩散模型的蒸馏方法。考虑到该轨道只能使用Cifar-100和Tiny-Imagenet数据集的生成模型在10分钟内生成固定数量的图像,我们需要使用可以高速生成图像的生成模型。在这项研究中,我们提出了一种基于稳定扩散的新型生成数据集蒸馏方法。特定的是,我们使用SDXL-Turbo模型,该模型可以以高速和质量生成图像。与其他每类只能生成图像(IPC)= 1的扩散模型相比,我们的方法分别可以实现Tiny-Imagenet的IPC = 10和CIFAR-100的IPC = 20。此外,要生成用于CIFAR-100和Tiny-Imagenet的高质量蒸馏数据集,我们将类信息用作文本提示,并为SDXL-Turbo模型发布数据增强。实验性源显示了该方法的有效性,我们在ECCV 2024 DD挑战的生成轨迹中获得了第三名。代码可在https://github.com/guang000/banko上找到。


语义意识的对象坐标空间...
Rael,10月23日至27日,2022年,第IX部分,第19-34页。Springer,2022。3 [3] Ruoxi Shi,Zhengrong Xue,Yang You和Cewu Lu。Skeleton合并:无监督的对齐键盘检测器。在IEEE/CVF计算机视觉和模式识别会议的会议记录中,第43-52页,2021年。1,2 [4] Ruida Zhang,Yan di,Zhiqiang Lou,Fabian Manhardt,Fed- Erico Tombari和Xiangyang Ji。RBP置态:类别级姿势估计的残留框架投影。在Compoter Vision-ECCV 2022:第17届欧洲会议,特拉维夫,以色列,10月23日至27日,2022年,会议记录,第一部分,第655-672页。Springer,2022。3 [5] Ruida Zhang,Yan Di,Zhiqiang Lou,Fabian Manhardt,Fed- Erico Tombari和Xiangyang ji。RBP置态:类别级姿势估计的残留框架投影。在Compoter Vision-ECCV 2022:第17届欧洲会议,特拉维夫,以色列,10月23日至27日,2022年,会议记录,第一部分,第655-672页。Springer,2022。4
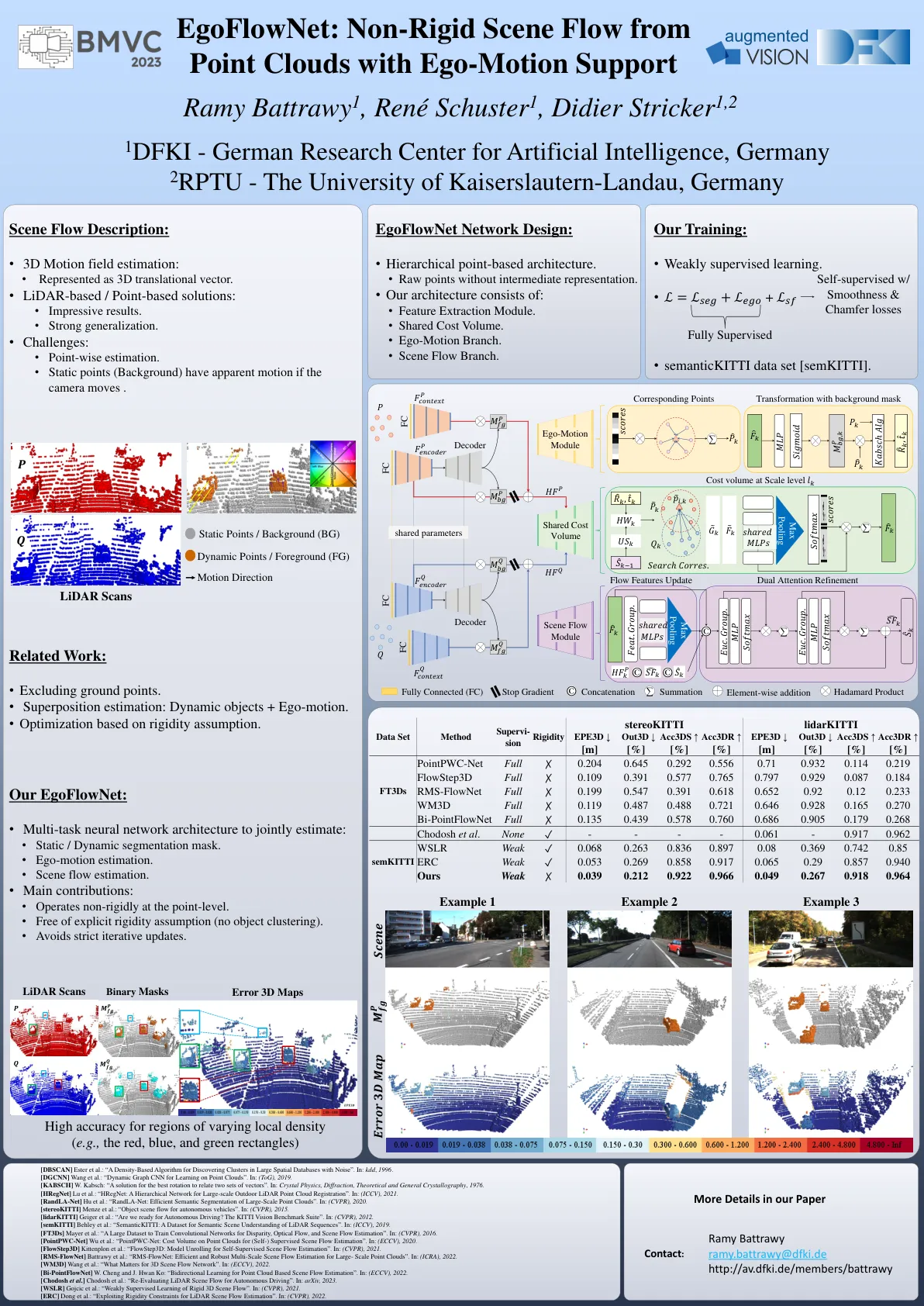
非刚性场景从点云流动,并带有自我感动...
[dbscan] Ester等。:“一种基于密度的算法,用于在具有噪声的大空间数据库中发现簇”。:KDD,1996年。[DGCNN] Wang等。:“用于在点云上学习的动态图CNN”。in :( tog),2019年。[Kabsch] W. Kabsch:“解决两组向量的最佳旋转解决方案”。in:晶体物理学,衍射,理论和一般晶体学,1976年。[Hregnet] Lu等。:“ Hregnet:用于大规模室外激光点云注册的分层网络”。in:(iccv),2021。[Randla-net] Hu等。:“ randla-net:大规模点云的有效语义分割”。in:(cvpr),2020。[Stereokitti] Menze等。:“自动驾驶汽车的对象场景流”。in:(cvpr),2015年。[Lidarkitti] Geiger等。:“我们准备好进行自动驾驶了吗?Kitti Vision基准套件”。in:(cvpr),2012年。[Semkitti] Behley等。:“ Semantickitti:用于LIDAR序列的语义场景的数据集”。in:(ICCV),2019年。[FT3DS] Mayer等。:“一个大型数据集来训练卷积网络以差异,光流和场景流量估计”。in:(cvpr),2016年。[pointpwc-net] Wu等。:“ PointPWC-NET:(自我监督场景流估计)点云上的成本量”。在:(ECCV),2020年。[FlowStep3d] Kittenplon等。:“ FlowStep3d:自我监督场景流估计的模型展开”。in:(cvpr),2021。[RMS-FLOWNET] Battrawy等。:“ RMS-FLOWNET:大规模点云的高效且稳健的多尺度场景流程估计”。in:(icra),2022。[WM3D] Wang等。:“对于3D场景流网络重要的东西”。in:(ECCV),2022。[Bi-Pointflownet] W. Cheng和J. Hwan Ko:“基于点云的场景流估计的双向学习”。in:(ECCV),2022。[Chodosh等人]Chodosh等。:“重新评估激光雷达场景以进行自动驾驶”。in:arxiv,2023。[WSLR] Gojcic等人。:“严格3D场景流的弱监督学习”。in:(cvpr),2021。[ERC] Dong等。 :“利用震子场景流量估计的刚性约束”。 in:(cvpr),2022。[ERC] Dong等。:“利用震子场景流量估计的刚性约束”。in:(cvpr),2022。

Amita Kamath
·表明,缺乏现有的VL组成性研究,因为它们仅研究了对模型输入(“硬否负”)的改变标签的影响,而不是驱动标签的扰动(“硬质”)。·策划了坚硬的积极因素的基准,并表明模型的性能很差。此外,改善硬质底片模型性能的方法加剧了硬质阳性的绩效差。·通过大规模产生并将其纳入填充性,改善了硬积极性和硬质量的模型性能。[ECCV 2024]