XiaoMi-AI文件搜索系统
World File Search SystemECSE
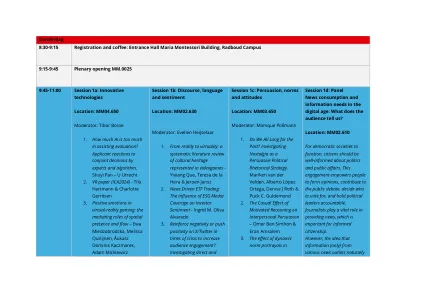
程序和摘要
情报工作。大多数AI系统都依靠人工来生成,注释和验证数据。这些任务通常是由数百万数据工作者执行的,通常是通过“微功能”平台执行大规模数据项目的片段。幽灵工作项目是Fimmmaker Lisette Olsthoorn与鹿特丹伊拉斯mus大学(EUR;由欧洲研究委员会资助)的“幽灵工人”团队之间的合作。该项目缩小了所谓的“幽灵工人”的日常生活,该术语指的是无形且不稳定的劳动力,为全球技术和AI基础设施提供动力。基于对欧洲工人的130次访谈,Olsthoorn发现,在家工作,缺乏办公室环境与大学互动的缺乏,缺乏他们为之工作的平台的认可以及被家人和朋友误解的平台,通常会使工人感到自己没有看到和孤立。因此,她邀请六名工人亲自聚在一起参加为期两天的会议。在重新创建每个参与者的家居官员中,邀请工人分享

ECSE 2022 毕业典礼招待会
2022 年春季 Ahmed、Saaif Z. Aung、Alex M. Banta、Ashley G. Bartolome、Cortez M. Berne、Patrick C. Borelli、Mark V. Choi、Justin Dai、Jane Fetterman、Alex N. Gevero、Adrian-James M. Glosner、Connor E. Hammel、Ivan B. Honaker、Michael C. Hopkins、Thomas W. Horsington、Thomas J. Jain、Suyash Jeon、Issaic Jian、Sissi Jiang、Jack Jin、Zhiqi Johnson、Zachary A. Khatiwala、Yash V. Kumar、Mitesh Langley、Erika M. Li、Cynthia Lin、Ray M. Magyar、Sandor Z.
拱门发现周ECSE
生活很少是一条直线!B.S. McGill University M.S. 伊利诺伊大学博士伦斯勒理工学院。 Fisher Control,爱荷华州,1981- 1982年喷气推进实验室,帕萨迪纳,1985- 1988年RPI教师:1988年 - 现任猫董事:2005 - 2013 - 2013年ISE部门:2013-2013-2018 ECSE DEPT主管:2018 - 2018年 - 现在现在B.S.McGill University M.S. 伊利诺伊大学博士伦斯勒理工学院。 Fisher Control,爱荷华州,1981- 1982年喷气推进实验室,帕萨迪纳,1985- 1988年RPI教师:1988年 - 现任猫董事:2005 - 2013 - 2013年ISE部门:2013-2013-2018 ECSE DEPT主管:2018 - 2018年 - 现在现在McGill University M.S.伊利诺伊大学博士伦斯勒理工学院。Fisher Control,爱荷华州,1981- 1982年喷气推进实验室,帕萨迪纳,1985- 1988年RPI教师:1988年 - 现任猫董事:2005 - 2013 - 2013年ISE部门:2013-2013-2018 ECSE DEPT主管:2018 - 2018年 - 现在

电气,计算机和系统工程(ECSE)
ECSE 275。 机器人技术的基础。 4个单位。 机器人课程的基本原理将使学生了解机器人技术的基本原则。 学生将探索从Braitenberg车辆开始的机器人技术的高级概念基础,并将这些知识应用于实验室体验和最终项目中的模拟和物理机器人硬件。 实验室经验将指导学生在面向项目的小组工作环境中应用理论练习日益复杂的任务。 该课程最终在学期结束时在机器人挑战项目中达到顶峰。 涵盖的主题是:传感器,执行器,运动学,控制,计划和编程。 将与现代机器人编程工具箱和框架一起介绍和使用编程语言和概念(例如C ++,面向对象的编程)。 这些语言的事先经验是不需要的。 本课程不需要以前的机器人技术经验。 提供为CSD 275和ECSE 275。 PREREQ :( Engr 130或Engr 131或Ecse 132)和Phys 121和Math 121。ECSE 275。机器人技术的基础。4个单位。机器人课程的基本原理将使学生了解机器人技术的基本原则。学生将探索从Braitenberg车辆开始的机器人技术的高级概念基础,并将这些知识应用于实验室体验和最终项目中的模拟和物理机器人硬件。实验室经验将指导学生在面向项目的小组工作环境中应用理论练习日益复杂的任务。该课程最终在学期结束时在机器人挑战项目中达到顶峰。涵盖的主题是:传感器,执行器,运动学,控制,计划和编程。将与现代机器人编程工具箱和框架一起介绍和使用编程语言和概念(例如C ++,面向对象的编程)。这些语言的事先经验是不需要的。本课程不需要以前的机器人技术经验。提供为CSD 275和ECSE 275。PREREQ :( Engr 130或Engr 131或Ecse 132)和Phys 121和Math 121。


CEGEP 入学资格
COMP 549 受大脑启发的人工智能 3 P - MATH 222、MATH 223 和 MATH 323;或同等学历。 COMP 551*** 应用机器学习 4 P - MATH 323 或 ECSE 205 或同等课程 COMP 559 计算机动画基础 4 P - MATH 222、MATH 223、COMP 206、COMP 250 COMP 562 机器学习理论 4 P - MATH 462 或 COMP 451 或(COMP 551、MATH 222、MATH 223 和 MATH 324)或 ECSE 551。ECSE 310 计算热力学 3 P - ECSE 200、ECSE 205、ECSE 222 ECSE 325 数字系统 3 P - ECSE 324 ECSE 405 天线 3 P - ECSE 206、ECSE 354 ECSE 412 离散时间信号处理 3 P - ECSE 206 ECSE 415介绍。计算机视觉 3 P - ECSE 205,(ECSE 206 或 ECSE 316)ECSE 420 并行计算 3 P - ECSE 427 ECSE 421 嵌入式系统 3 P - ECSE 324 ECSE 422 容错计算 3 P - ECSE 324 和(ECSE 250 或 COMP 250)ECSE 423 光子学基础 3 P - ECSE 354 ECSE 424 人机交互 3 P - (ECSE 324 和 ECSE 250)或(ECSE 324 和 COMP 250)或(COMP 251 和 COMP 273)ECSE 425 计算机架构 3 P - ECSE 324 ECSE 427 操作系统 3 P - (ECSE 324 或 COMP 273)ECSE 430光子器件与系统 3 P - ECSE 354,MIME 262 ECSE 431 VLSI CAD 简介。 3 P - ECSE 324、ECSE 331 ECSE 435 混合信号测试技术 3 P - ECSE 206、ECSE 335 ECSE 436 信号处理硬件 3 P - ECSE 206、ECSE 324、ECSE 325 ECSE 446 真实图像合成 3 P - (ECSE 205 和 ECSE 250)或(ECSE 202 和 ECSE 205 和 COMP 250)ECSE 450 电磁兼容性 3 P - ECSE 222、ECSE 331、(ECSE 353 或 ECSE 354)ECSE 451 EM 传输和辐射 3 P - ECSE 354 ECSE 460 电气设备 3 P - ECSE 464 ECSE 463 * 电力发电 3 P - (ECSE 362 或ECSE 461) ECSE 464 电力系统分析 3 P - ECSE 362 ECSE 465** 电力电子系统 3 P - ECSE 331、ECSE 362 ECSE 466 配电系统 3 P - ECSE 362 ECSE 467 电力通信 3 P - ECSE 464 ECSE 468 电力工业 3 P - ECSE 362 ECSE 469 电力保护 3 P - ECSE 464 ECSE 472 电路仿真和建模基础 3 P - ECSE 206、ECSE 331 ECSE 500 系统数学基础 3 ECSE 501 线性系统 3 C - ECSE 500 或获得讲师许可 ECSE 507 优化与最优控制 3 P - (ECSE 343 或 ECSE 543 或 ECSE 501 或 COMP 540 或获得讲师许可)ECSE 508 多智能体系统 3 P - ECSE 205 或同等学历 ECSE 509 概率与随机信号 2 3 P - (ECSE 206 或 ECSE 316),ECSE 205 ECSE 510 随机系统的过滤与预测 3 P - ECSE 500,ECSE 509 或同等学历 ECSE 516 非线性和混合控制系统 3 P - ECSE 500,ECSE 501 或同等学历 ECSE 519 半导体纳米结构与纳米光子器件 3 P - ECSE 354,(ECSE 433 或 ECSE 533) ECSE 521 数字通信 1 3 P - ECSE 408;C- ECSE 509 ECSE 526 人工智能 3 P - ECSE 324 ECSE 532 计算机图形学 4 P - ECSE 324 ECSE 543 电气工程中的数值方法 3 P - ECSE 324、ECSE 331、ECSE 251 ECSE 544 计算摄影 4 P - ECSE 205 和(ECSE 206 或 ECSE 316)ECSE 551*** 工程师机器学习 4 P - (ECSE 250 或 COMP 250)和(ECSE 205 或 MATH 323); C- ECSE 343 或 ECSE 543 或 MATH 247 ECSE 552 深度学习 4 P - (ECSE 551 或 COMP 551) ECSE 554 应用机器人 4 P - ECSE 205、COMP 206、ECSE 250 和(ECSE 343 或 MATH 247)或同等学历。 ECSE 556 网络生物学中的机器学习 4 ECSE 557 自主智能系统伦理学简介 3 P - (ECSE 202 或 ECSE 250 或 COMP 250)和(ECSE 205 或 MATH 323)或经讲师许可; C - COMP 451 或 COMP 551 或 ECSE 551 或经讲师许可
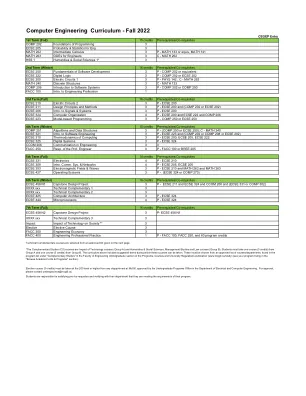
计算机工程课程 - 2022 年秋季
学分 先决条件/共同条件 ECSE 307 线性系统与控制 4 P - ECSE 206、ECSE 210 ECSE 335 微电子学 4 P - ECSE 331 ECSE 403 控制 4 P - ECSE 307 ECSE 408 通信系统 4 P - ECSE 205、ECSE 308 ECSE 412 离散时间信号处理 3 P - ECSE 206 ECSE 415 计算机视觉简介 3 P - ECSE 205、(ECSE 206 或 ECSE 316) ECSE 416 电信。网络 4 P - (ECSE 250 或 COMP 250)和 ECSE 205 和(ECSE 308 或 ECSE 316)ECSE 420 并行计算 3 P - ECSE 427 ECSE 422 容错计算 3 P - ECSE 324 和(ECSE 250 或 COMP 250)ECSE 428 软件工程实践 3 P - (ECSE 321 或 COMP 335)ECSE 435 混合信号测试技术 3 P - ECSE 206,ECSE 335 ECSE 439 软件语言工程 3 P - (ECSE 321 或 COMP 303)ECSE 508 多智能体系统 3 P - ECSE 205 或同等学历 ECSE 510 随机系统的过滤和预测 3 P - ECSE 500,ECSE 509 或同等学历ECSE 544 计算摄影 4 P - ECSE 205,ECSE 206
cegep
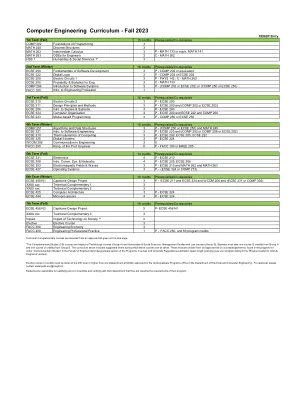
Credits Prerequisites/Co-requisites ECSE 307 Linear Systems & Control 4 P - ECSE 206, ECSE 210 ECSE 335 Microelectronics 4 P - ECSE 331 ECSE 403 Control 4 P - ECSE 307 ECSE 408 Communication Systems 4 P - ECSE 205, ECSE 308 ECSE 412 Discrete-Time Signal Processing 3 P - ECSE 206 ECSE 415 Intro.到计算机视觉3 P -ECSE 205,(ECSE 206或ECSE 316)ECSE 416 TELECOM。网络4 P-(ECSE 250或COMP 250)和ECSE 205和(ECSE 308或ECSE 316)ECSE 420平行计算3 P -ECSE 427 ECSE 427 ECSE 428软件工程实践3 P-(ECSE 321或COMP 335)(ECSE 321或COMP 335) Comp 303)ECSE 508多代理系统3 P -ECSE 205或等效的ECSE 510随机系统的过滤和预测3 P -ECSE 500,ECSE 500,或ECSE 509或等效的ECSE 544计算摄影4 P -ECSE 205和(ECSE 206或ECSE 206或ECSE 316)