XiaoMi-AI文件搜索系统
World File Search SystemEIN

cysiam宣布与CrowdStrike合作,以增强英国国防供应链的网络弹性
EIN PressWire的优先级是源透明度。 我们不允许不透明的客户,我们的编辑试图谨慎除清除虚假和误导性内容。 作为用户,如果您看到了我们错过的东西,请引起我们的注意。 欢迎您的帮助。 EIN Presswire,每个人的互联网新闻PressWire™,试图定义一些在当今世界上合理的界限。 请参阅我们的编辑准则以获取更多信息。 ©1995-2025 Newsmatics Inc.保留所有权利。EIN PressWire的优先级是源透明度。我们不允许不透明的客户,我们的编辑试图谨慎除清除虚假和误导性内容。作为用户,如果您看到了我们错过的东西,请引起我们的注意。欢迎您的帮助。EIN Presswire,每个人的互联网新闻PressWire™,试图定义一些在当今世界上合理的界限。请参阅我们的编辑准则以获取更多信息。©1995-2025 Newsmatics Inc.保留所有权利。
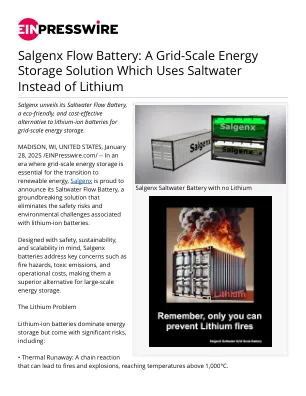
Salgenx流量电池:使用盐水代替锂>的网格尺度储能解决方案
EIN PressWire的优先级是源透明度。 我们不允许不透明的客户,我们的编辑试图谨慎除清除虚假和误导性内容。 作为用户,如果您看到了我们错过的东西,请引起我们的注意。 欢迎您的帮助。 EIN Presswire,每个人的互联网新闻PressWire™,试图定义一些在当今世界上合理的界限。 请参阅我们的编辑准则以获取更多信息。 ©1995-2025 Newsmatics Inc.保留所有权利。EIN PressWire的优先级是源透明度。我们不允许不透明的客户,我们的编辑试图谨慎除清除虚假和误导性内容。作为用户,如果您看到了我们错过的东西,请引起我们的注意。欢迎您的帮助。EIN Presswire,每个人的互联网新闻PressWire™,试图定义一些在当今世界上合理的界限。请参阅我们的编辑准则以获取更多信息。©1995-2025 Newsmatics Inc.保留所有权利。

俄亥俄州医疗保健计划
雇主/公司/计划管理员/计划赞助商联系信息:俄亥俄州医疗保健计划2080 City Drive哥伦布,俄亥俄州哥伦布,43219电话:(614)445-3750雇主/公司识别号(EIN)(EIN)(EIN)(EIN)(EIN),由内部税务局指定,由内部税务部门分配:45-4109527 PLAN COLLANS PLAN COLLATE INCERTION:45-4109527 HEALTYCERY INCERTION:45-4109527俄亥俄州哥伦布市Citygate Drive 43219电话:(614)445-3750计划编号:501停止损失覆盖范围:该公司已购买了特定和总体停止损失再保险覆盖范围。组编号:A18103福利书生效日期:2024年1月1日计划年:计划的财务记录以计划年度为基础。计划年度每年12月31日结束。计划的类型:医疗和处方药物名称,索赔处理器的地址和电话号码:Allied Benefit Systems,LLC P.O.框211651 Eagan,MN 55121电话:(312)906-8080或(800)288-2078(IL)

国际机械师协会汽车城退休基金 EIN/计划编号:38-6237143/001 清单项目 #18 – 5.01 过去和当前采取的措施
董事会为避免养老金计划破产而采取的主要措施是增加雇主缴费和减少福利。在过去十年 (10) 年间,董事会一直与谈判各方合作,制定可持续的雇主缴费和合理养老金福利水平组合。同时,董事会和谈判各方受到集体谈判程序以及雇主愿意和能够向基金缴费的数额的限制。截至 2006 年 7 月 1 日开始的计划年度,养老金计划的市场资金为 74%,其资产的投资回报率为 5.36%。当时,有 606 名退休人员、遗属和替代受款人处于领薪状态;324 名非活跃既得参与者和延期受益人;392 名活跃参与者,平均每年工作 49 周。累计既得福利的现值为 111,834,540 美元,资产的市场价值为 82,315,121 美元。另外,自 2006 年 7 月 1 日起,福利应计率从雇主缴费的 2.0% 降至 0.5%,2006 年 7 月 1 日或之后的所有缴费率增加均被归类为未记入。

可持续和社会名单是为了可持续,社会友好,多样的学生的合并,包括Barr
每个人的多样性都是一个人,并且希望得到这样的对待,其中包括无论是特质的歧视而言。因此,我们是任何形式的种族主义,性别歧视和其他形式的对个人发展压迫的形式的“可持续和社会名单”,并对权利表现出清晰的优势。我们代表文化和性多样性以及多元民主的观点交流。由于歧视从我们自己的单词选择开始,因此我们致力于整个斯图加特大学的性别敏感语言,还将支持Stuvus演讲平等,多样性和社会问题。此外,学生代表的目的也应在人员绘制社会多样性并参与更多女性和各种学生的方面。应该寻求他们的均等。此外,我们坚信女性*应该在科学领域得到更多促进。
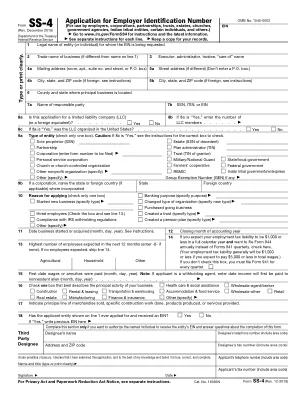
SS-4 表格(2019 年 12 月修订版)- IRS
2 但是,如果现有实体仅 (a) 更改了其企业名称,(b) 在 8832 表格上选择更改征税方式(或受默认规则约束),或 (c) 终止其合伙企业身份,因为合伙企业资本和利润中的至少 50% 的总权益在 12 个月内被出售或交换,则不要申请新的 EIN。终止合伙企业的 EIN 应继续使用。请参阅法规第 301.6109-1(d)(2)(iii) 节。
自然资源状况报告:临时报告2024
Sonarr已被公共服务委员会(PSB)使用,以告知他们的健康计划。PSB在威尔士每个地方当局地区的所有公共服务中工作。例如,格拉摩根PSB的第二个健康计划的谷认为“应对气候和自然紧急情况”是关键优先领域。他们根据需要描述的更改包括考虑运输,能源,食物,生物多样性以及如何使用建筑物和土地。(ein兄弟 - 我们的谷,2023年)。他们使用了Sonarr2020及其在环境和运输报告的分析中的发现部分(EIN Bro -esur -Vale,2022年)。
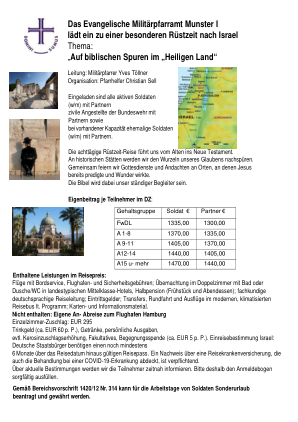
芒斯特一号福音派军事教区邀请您参加以色列特别静修会。主题:“在‘圣地’追寻圣经的踪迹”
旅行价格包含的服务:航班及机上服务、机场和安保费;在典型的中产阶级酒店中配有浴缸或淋浴/卫生间的双人间过夜,半膳(早餐和晚餐);专业德语导游;入场费;根据计划乘坐现代化空调大巴进行接送、游览和短途旅行;地图和信息材料。不包括:自行抵达和离开汉堡机场、单人间附加费:295 欧元、小费(约每人 60 欧元)、饮料、个人开支、可能增加的煤油附加费、可选项目、会议捐赠(约每人 5 欧元)。以色列入境要求:德国公民需要持有有效期自旅行日期起至少 6 个月的护照。必须提供涵盖 COVID-19 疾病治疗的旅行健康保险证明。我们将及时向参与者告知当前的规定。请仔细填写注册表。
芒斯特一号福音派军事教区邀请您参加以色列特别静修会。主题:“在‘圣地’追寻圣经的踪迹”
旅行价格包含的服务:航班及机上服务、机场和安保费;在典型的中产阶级酒店中配有浴缸或淋浴/卫生间的双人间过夜,半膳(早餐和晚餐);专业德语导游;入场费;根据计划乘坐现代化空调大巴进行接送、游览和短途旅行;地图和信息材料。不包括:自行抵达和离开汉堡机场、单人间附加费:295 欧元、小费(约每人 60 欧元)、饮料、个人开支、可能增加的煤油附加费、可选项目、会议捐赠(约每人 5 欧元)。以色列入境要求:德国公民需要持有有效期自旅行日期起至少 6 个月的护照。必须提供涵盖 COVID-19 疾病治疗的旅行健康保险证明。我们将及时向参与者告知当前的规定。请仔细填写注册表。
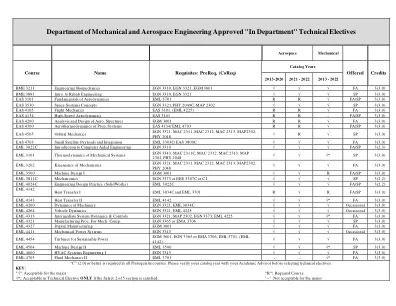
经批准的“系内”技术选修课
BME 5267 生物流体力学 MAP 2302, EML 3701, EML 4703 √ FA 3(3,0) EAS 5123 中级空气动力学 EAS 4143, (EML 5060) √ 偶尔 3(3,0) EAS 5211 气动弹性学 EAS 3101/EML 3701, EAS 4210/EML 4220 √ 偶尔 3(3,0) EAS 5315 火箭推进 EAS 4134/ EML 4703 √ 偶尔 3(3,0) EEE 5332C 薄膜技术 EEE 3350/ 同等学历 √ 偶尔 3(2,1) EEE 5352C 半导体材料与器件特性 EEE 3350/ CI √奇数 FA 3(2,3) EEE 5356C 固态器件制造 EEE 3350 √ FA/ SP 4(3,3) EEE 5378 CMOS 模拟和数字电路设计 EEE 4309C √ FA 3(3,0) EEE 5513 数字信号处理应用 EEL 4750 √ SP 3(3,0) EEE 5542 随机过程 I EEL 3552C, STA 3032 √ FA/ SP 3(3,0) EEE 5557 雷达系统简介 EEL 3552C √ SP 3(3,0) EEL 5173 线性系统理论 EEL 3657 √ SP 3(3,0) EEL 5245C 电力电子学 EEE 4309C √ FA 3(3,0) EEL 5437C 微波工程EEL 3470/ CI √ FA 4(3,3) EEL 5462C 天线分析与设计 EEL 3470/ 等效 √ 奇数 FA 3(3,1) EEL 5630 数字控制系统 EEL 3657 √ FA 3(3,0) EEL 5669 自主机器人系统 EEL 5173/ CI √ 奇数 FA 3(3,0) EEL 5722C 现场可编程门阵列 (FPGA) 设计 EEE 3342C √ 偶数 FA 3(3,3) EIN 5108 技术组织环境 研究生身份/ CI √ FA 3(3,0) EIN 5117 管理信息系统 I CI √ SP 3(3,0) EIN 5140 项目工程 研究生身份/ CI √ FA/SP 3(3,0) EIN 5248C人体工程学 CI √ FA 3(2,2) EIN 5251 可用性工程 STA 3032/ 同等 √ SP 3(3,0) EIN 5346 工程物流 ESI 5306/ ESI 4312 √ 偶尔 3(3,0) EMA 5060 高分子科学与工程 EGN 3365 √ 偶尔 3(3,0) EMA 5104 中间结构与材料属性 EGN 3365 √ FA 3(3,0) EMA 5106 冶金热力学 EGN 3365 √ 偶尔 3(3,0) EMA 5140 陶瓷材料概论 EGN 3365 √ 偶尔 3(3,0) EMA 5317 材料动力学 CI √ 偶尔3(3,0) 指数移动平均线5584 生物材料 EGN 3365 √ 偶数 SP 3(3,0) EMA 5610 激光材料加工 EGN 3343/ EMA 5106 / CI √ 偶尔 3(3,0) EML 5060 MAE 中的数学方法 MAP 2302 √ FA 3(3,0) EML 5152 中级传热 EML 4142, EML 5060 √ 偶尔 3(3,0) EML5228C 模态分析 EML 3303C, EML 5060 √ 偶尔 3(3,0) EML 5237 中级材料力学 EML 3500/ EAS 4200, EML 5060 √ FA 3(3,0) EML 5271 中级动力学 EGN 3321/ EML 3217 √ 偶尔 3(3,0) EML 5290 MEMS 与微机械加工简介 研究生身份/CI √ 零星 FA 3(3,0) EML 5311 系统控制 EML 4225C,(EML 5060) √ 偶尔 3(3,0) EML 5402 涡轮机械 EML3101,EML 4703/EAS 4134 √ 偶尔 3(3,0) EML 5456 可持续电力涡轮机 EML 5237 √ FA 3(3,0) EML 5546 复合材料工程设计 EML 5237 √ 偶尔 3(3,0) EML 5713 中级流体力学 EML 4703,(EML 5060) √ 偶尔 3(3,0)需缴纳研究生学费和费用(GPA ≥ 3。0 必修)本科生需要 Override 才能注册这些课程。未在此列表中列出的课程必须获得系副主任的批准。于 2022 年 8 月 22 日更新