XiaoMi-AI文件搜索系统
World File Search SystemEdges

绘制人类表现的边界
摘要。在 Horizon 2020 资助的未来天空安全计划中,人类表现包络线项目通过增加压力和工作量并降低情境意识,将航空公司飞行员推向实时驾驶舱模拟中表现的极限。目的是找出这些因素如何相互作用,并检测人类表现的极限,在这些极限处应采用某种形式的自动化支持以确保安全持续飞行。采用了一系列措施,从行为到生理(例如心率、眼动追踪和瞳孔扩张),以实时监测飞行员的表现。心率、心率变异性、眼动追踪、认知演练和人机界面 (HMI) 可用性分析等几种措施被证明是有用且相对可靠的,可以检测性能下降,并确定在哪些地方需要改变信息呈现以更好地支持飞行员在具有挑战性的情况下的表现。这些结果导致了对未来驾驶舱人机界面原型的拟议更改,随后在最终模拟中进行了验证。研究结果还为“智能背心”的开发提供了参考,飞行员可以穿着它来监测与性能相关的一系列信号。
绘制人类表现的边界
摘要。在 Horizon 2020 资助的未来天空安全计划中,人类表现包络线项目通过增加压力和工作量并降低情境意识,将航空公司飞行员推向实时驾驶舱模拟中表现的极限。目的是找出这些因素如何相互作用,并检测人类表现的极限,在这些极限处应采用某种形式的自动化支持以确保安全持续飞行。使用了一系列措施,从行为到生理(例如心率、眼动追踪和瞳孔扩张),以实时监测飞行员的表现。几种措施 - 例如心率、心率变异性、眼动追踪、认知演练和人机界面 (HMI) 可用性分析 - 被证明在检测性能下降以及确定信息呈现需要改变的地方以更好地支持飞行员在具有挑战性的情况下的表现方面是有用且相对可靠的。这些结果促成了未来驾驶舱人机界面原型的拟议变更,随后在最终模拟中进行了验证。这些结果还为飞行员可以穿戴“智能背心”的开发提供了参考,它可以监测与性能相关的一系列信号。
东南亚的边缘:第二版
许多这些边缘来自新加坡 - 小民族国家继续超越其重量,以领导深度技术,数字创新和公共部门的转型,并得到了强大的政府支持和高级技术基础设施的支持。更重要的是,它是通往东南亚的门户,这就是为什么我们很高兴能再次与新加坡经济发展委员会和美国东亚商业委员会合作,以此。创新远非独自与新加坡共同解决;来自印度尼西亚,马来西亚,菲律宾,泰国和越南的例子增加了该地区的潜在和可能性的多样性。
使用边缘进行视觉定位、映射和重建
视觉导航是机器人技术中的基本问题之一。在过去十年中,这一领域取得了许多重要贡献。截至目前,基于特征点的方法最为流行。虽然这些方法在许多应用中都取得了成功,但无纹理环境对于这些方法来说可能存在很大问题,因为在这些场景中可靠的特征点数量通常很少。尽管如此,边缘可能仍然大量可用,但却未被使用。在本论文中,我们提出了互补的基于边缘的方法,用于视觉定位、映射和密集重建,这些方法在理论上最小的场景配置中仍可运行。从稀疏立体边缘匹配开始,我们提出了两种具有不同性能/效率权衡的技术,它们都针对实时操作。除了与流行的密集立体技术进行比较之外,我们还将这些算法与我们对基于线段的立体方法的有效改编进行了比较。谈到立体视觉里程计,我们提出了一种基于线段的重新投影优化方法,该方法能够在无纹理环境中发挥作用,而经过验证的最先进的基于特征点的方法则无法发挥作用。我们认为,我们的方法甚至可以应对理论上最小的情况,即仅由两个非平行线段组成。然后,我们将这种方法扩展为基于完整线段的同时定位和映射解决方案。使用捆绑调整,我们能够
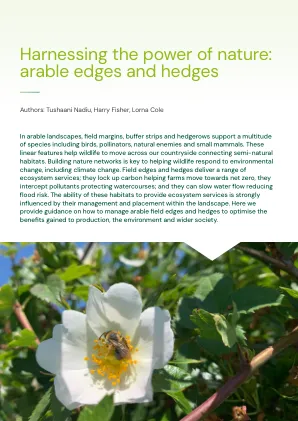
利用自然力量:可耕地和树篱
在可耕种的景观,田间边缘,缓冲带和树篱中支持许多物种,包括鸟类,传粉媒介,天然敌人和小型哺乳动物。这些线性特征有助于野生动植物在我们的乡村中移动,连接半自然栖息地。建立自然网络是帮助野生动植物应对环境变化的关键,包括气候变化。现场边缘和树篱提供一系列生态系统服务;他们锁定碳帮助农场向净净净的碳移动,拦截了保护水彩的污染物。它们可以减慢水流来降低洪水风险。这些栖息地提供生态系统服务的能力受到其在景观中的管理和位置的强烈影响。在这里,我们提供了有关如何管理可耕地边缘和树篱的指导,以优化生产,环境和更广泛的社会的收益。

通过对人皮层的图案微刺激的触觉边缘和运动
11 Shirley Ryan能力实验室,伊利诺伊州芝加哥。¥对应:vallegiacomo@gmail.com†体感皮质的同等贡献的心理内微刺激(ICMS)会唤起触觉感觉,可以通过改变电极和刺激参数1-3来系统地操纵其位置和特性。这种现象可用于从脑控制的仿生手传达有关对象相互作用的反馈。但是,ICMS当前提供了艰巨的触摸感,限制了灵巧的对象操纵和对神经假体系统的有意识体验。利用我们对S1 4,5中这些感官特征如何编码的理解,我们试图扩展基于ICMS的人工触摸的曲目,以提供有关瘫痪者中对象的局部几何形状和运动的信息。首先,我们通过多个空间图案的电极同时传递了ICM,采用了对齐投影场(PFS)的特定布置。未提及的参与者报告了边缘的感觉。接下来,我们创建了更复杂的PFS,发现参与者可以直观地感知任意触觉形状和皮肤压痕模式。通过依次通过具有空间不连续的PF的电极传递图案化的ICM,我们甚至可以唤起整个皮肤的运动感觉,即我们能够系统地操纵的方向和速度。我们得出的结论是,受我们对S1中触觉编码的理解启发的ICM的适当时空图案可以引起复杂的感觉。我们的发现有助于推动人造触摸的界限,从而丰富了参与者的有意识的感觉体验,从简单的人造知觉到模仿自然触摸的高度信息的感觉。

癌症中耐药的持久细胞:前沿和未来方向
摘要 耐药持久性 (DTP) 细胞群最初是在抗生素耐药性细菌生物膜中发现的。此后,在癌细胞中发现了具有类似特征的类似细胞群,并且与缺乏潜在基因组改变的治疗耐药性有关。虽然过去十年的进展提高了我们对 DTP 细胞在癌症中的生物学作用的理解,但对这些细胞在治疗耐药性中的作用的临床知识仍然有限。尽管如此,针对这一群体有望提供新的治疗机会。在本期观点中,我们旨在提供 DTP 表型的明确定义,讨论这些细胞的潜在特征、它们的生物标志物和脆弱性,并鼓励对 DTP 细胞进行进一步研究,这可能会提高我们的理解并促进开发更有效的抗癌疗法。

prosip:用于学习边缘机器人清洁的概率表面相互作用
摘要 - 从演示中学习(LFD)已成为一种有希望的方法,使机器人可以直接从人类示范中获取复杂的任务。但是,涉及自由形式3D表面上表面相互作用的任务在建模和执行中带来了独特的挑战,尤其是在演示和机器人执行之间存在几何变化时。本文提出了一个称为概率表面相互作用原始原始原始词(Prosip)的新型框架,该框架从系统地结合了表面路径和局部表面效果。仪器工具允许无缝记录和执行人类示范。通过设计,prosips独立于时间,不变到刚体的位移,并使用带有笛卡尔控制器的任何机器人平台。该框架用于浴室水槽的边缘清洁任务。证明了对各种对象几何形状和显着扭曲对象的概括能力。模拟和具有9度自由机器人平台的实验设置证实了绩效。

su(4)对称性断裂和诱导的石墨烯量子大厅边缘的超导性
在石墨烯中,与量子大厅(QH)方向上的自旋和山谷自由度相关的近似SU(4)对称性在石墨烯Landau水平(LLS)的四重脱胶中反映了。相互作用和Zeeman效应打破了这种近似对称性并提高LLS的相应堕落性。我们研究了近似SU(4)对称的破裂如何影响位于超导体附近的石墨烯QH边缘模式的性质。我们展示了四倍变性的提升是如何定性地修改QH-螺旋导体异质结的运输特性。对于零LL,通过将边缘模式放置在靠近超导体的位置,从原则上讲,在存在较小的Zeeman Field的情况下,可以实现支撑Majoranas的一维拓扑超导体。我们估计了这种拓扑超导体的拓扑间隙,并将其与QH-Superconductor界面的性质相关联。

通过高谐波一代中的Quasiperiodic Aubry-André-Harper链中的多纹理和移动性边缘
我们表明,高谐波光谱学为探测线性响应范围以外的准晶体的电子特性提供了高级途径。着眼于Aubry-André-Harper(AAH)链,我们从谐波发射强度中提取了多重型光谱,这是电子态在准晶体中电子状态空间分布的重要指标。此外,我们解决了迁移率边缘的检测,划定广义AAH模型中局部和扩展的特征状态的重要能量阈值。这些迁移率边缘的精确识别阐明了金属 - 绝缘体的跃迁以及这些边界附近的电子状态的行为。将高谐波光谱与AAH模型合并,为理解排序晶体中的本地化与扩展状态之间的相互作用提供了一个有力的框架,以在线性响应研究中未捕获的极宽的能量范围,从而为指导未来的实验研究提供了宝贵的见解。