XiaoMi-AI文件搜索系统
World File Search SystemEncoders

旋转编码器 线性编码器 - Wimesure
光电旋转编码器 A28 8 A36 10 AK36 新品 12 A42M 14 A75M 16 AK50 18 A58 20 AK58 24 AP58 新品 28 A58H 30 A58H1 32 A58HE 34 A58HM 36 A90H 38 A110 40 A170 42 A170H 44

真空环境下的线性编码器
低释气性为防止真空室内压力急剧升高,真空兼容编码器不得释放大量气体。在超高真空中,每个部件都至关重要。例如,某些塑料会释出溶剂。这类塑料通常包含在电路板、粘合剂或涂层中,但在超高真空环境中部署的设备中应完全避免使用。这就是海德汉公司采用真空兼容电路板、粘合剂和涂层的原因。在超高真空环境中,必须将部件数量减至最少。例如,信号转换器应放在真空室外,这就是海德汉公司提供带有外部信号转换器的真空兼容编码器的原因。在仅需要高真空的应用中,这些设备也可放置在真空室内。

绝对式编码器 ENA36IL-R***-SSI
SSI 输出格式 标准 • 空闲状态下,信号线“Data +”和“Clock +”处于高电平 (5 V)。 • 时钟信号首次从高电平切换到低电平时,开始传输数据,其中当前信息(位置数据 (D n ) 和特殊位 (S))存储在编码器中。 ± • 最高位 (MSB) 通过第一个脉冲上升沿应用于编码器的串行数据输出。 • 下一个连续的低位通过每个后续的脉冲上升沿传输。 • 传输最低位 (LSB) 后,数据线切换到低电平,直到单稳态触发器时间 T m 到期。 • 直到数据线再次切换到高电平或时钟暂停时间 T p 到期,才能开始后续数据传输。 • 时钟序列完成后,单稳态触发器时间 T m 通过最后一个脉冲下降沿触发。 • 单稳态触发器时间 T m 决定最低传输频率。

绝对式编码器 ENA58IL-S***-CANopen
抗干扰措施 使用高度复杂的微电子器件需要始终实施抗干扰和布线概念。现代机器的结构越紧凑,对性能的要求越高,这一点就变得越重要。以下安装说明和建议适用于“正常工业环境”。没有一种解决方案适合所有干扰环境。当采用以下措施时,编码器应处于完美的工作状态: • 在串行线的开始和结束处(例如,控制和最后一个编码器)用 120 电阻器(接收/发送和接收/发送之间)终止串行线。 • 编码器的接线应远离可能造成干扰的电源线。 • 屏蔽电缆横截面积至少为 4 mm²。 • 电缆横截面积至少为 0.14 mm²。 • 屏蔽和 0 V 的接线应尽可能呈放射状排列。 • 不要扭结或卡住电缆。

绝对式编码器 ENA36IL-R***-CANopen
抗干扰措施 使用高度复杂的微电子器件需要始终实施抗干扰和布线概念。现代机器的结构越紧凑,对性能的要求越高,这一点就变得越重要。以下安装说明和建议适用于“正常工业环境”。没有一种解决方案适合所有干扰环境。当采用以下措施时,编码器应处于完美的工作状态: • 在串行线的开始和结束处(例如,控制和最后一个编码器)用 120 电阻器(接收/发送和接收/发送之间)终止串行线。 • 编码器的接线应远离可能造成干扰的电源线。 • 屏蔽电缆横截面积至少为 4 mm²。 • 电缆横截面积至少为 0.14 mm²。 • 屏蔽和 0 V 的接线应尽可能呈放射状排列。 • 不要扭结或卡住电缆。 • 遵守数据表中给出的最小弯曲半径,并避免拉伸和剪切载荷。操作说明
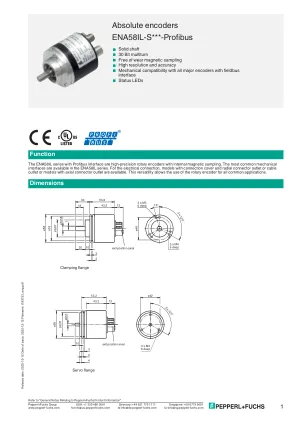
绝对编码器ENA58IL-S *** - PROFIBUS
反干扰测量高度复杂的微电子的使用需要一贯实施的反干扰和布线概念。这变得越重要,建筑物的紧凑程度就越大,对现代机器性能的需求就越高。以下安装说明和建议适用于“普通工业环境”。对于所有干扰环境,没有理想的解决方案。应用以下措施时,编码器应处于完美的工作状态:•在串行线的开始和结束时,串行线终止了串行线(在接收/传输和接收/传输之间)(例如,控件和最后一个编码器)。•编码器的接线应与能量线的距离很大,这可能会引起干扰。•屏幕的电缆横截面至少4mm²。•电缆横截面至少0,14mm²。•屏幕的接线和0 V的接线应在可能的情况下径向排列。•请勿扭结或堵塞电缆。•遵守数据表中给出的最小弯曲半径,并避免拉伸和剪切负荷。操作说明
绝对旋转编码器 - Netzer Precision
Netzer的DS Electric Encoders™家族符合在各种应用中使用的要求,从高级手术机器人技术到复杂的防御应用。及其浮动转子的无接触式芯非常耐用,并且可以抵抗振动和冲击。低调,空心轴结构,适合紧凑,高密度设计,并为小至16mm至130mm的编码器提供无与伦比的精度和分辨率。

OPS™ 系列编码器 - Celera Motion
1.验证传感器安装表面高度 请参阅 OPS 接口图了解最新尺寸。验证传感器安装表面基准“A”与刻度尺顶部之间的 Z 高度距离如下: 胶带刻度尺:撕掉蓝色保护膜后,胶带刻度尺顶部到传感器基准“A”的 Z 轴距离:3.09 毫米 ±0.15 Z 高度计(型号 ZG-PP1)可用于验证 PurePrecision Marker Tape II 和 Laser Tape II 刻度尺的正确 Z 高度 玻璃刻度尺:玻璃刻度尺顶部到传感器基准“A”的 Z 轴距离:2.93 毫米 ±0.15 Z 高度计(型号 ZG-GS1)可用于验证 PurePrecision Performance and Value 线性玻璃刻度尺的正确 Z 高度
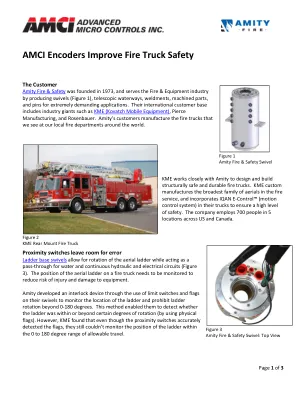
AMCI 编码器提高消防车安全性
AMCI 编码器提高消防车安全性 客户 Amity Fire & Safety 成立于 1973 年,为消防和设备行业生产转环(图 1)、伸缩水道、焊接件、机加工零件和销钉,以满足极其苛刻的应用要求。他们的国际客户群包括 KME(Kovatch 移动设备)、Pierce Manufacturing 和 Rosenbauer 等行业巨头。Amity 的客户制造我们在世界各地当地消防部门看到的消防车。KME 与 Amity 密切合作,设计和制造结构安全且耐用的消防车。KME 定制生产消防服务中最广泛的高空作业车系列,并在其卡车中采用 IQAN E-Control™(运动控制系统)以确保高水平的安全性。该公司在美国和加拿大的 5 个地点拥有 700 名员工。接近开关留有误差空间 梯子底座旋转装置允许云梯旋转,同时充当水和连续液压和电路的通道(图 3)。需要监控消防车上云梯的位置,以降低受伤和设备损坏的风险。Amity 通过在旋转装置上使用限位开关和标志开发了一种联锁装置,以监控梯子的位置并禁止梯子旋转超过 0-180 度。这种方法使他们能够检测梯子是否在一定旋转度数内或之外(通过使用物理标志)。但是,

运动皮层的深度学习神经编码器
摘要 - 心脏内脑机界面(BMIS)将神经活动转化为控制信号,以驱动假体或通信设备,例如机器人臂或计算机光标。在临床上可行,BMI解码器必须达到高准确性和鲁棒性。优化这些解码器是昂贵的,传统上需要动物或人类的实验跨越数年。这是因为BMI是闭环系统,用户在其中更新其电动机命令是为了响应不完美的解码输出。使用先前收集的“频线”数据的解码器优化将不会对此闭环响应进行计算。明显加速的解码器优化的另一种方法是使用闭环实验模拟器。该模拟器的关键组成部分是神经编码器,该神经编码器合成从运动学产生神经种群活动。先前的神经编码器并未模拟神经种群活动的重要特征。为了克服这些局限性,我们使用了深度学习的神经编码器。我们发现了这些模型在再现刺激性时间直方图(PSTHS)和神经popula posula todyics中的先验神经编码器上的表现非常优于先前的神经编码器。我们还发现,深度学习神经启动器可以更好地匹配神经解码,从而在频道数据和闭环实验数据中结果匹配。我们预计这些深度学习的神经编码器将大大改善BMI的模拟器,从而更快地评估,优化和BMI解码器算法的表征。