XiaoMi-AI文件搜索系统
World File Search SystemEnvironments

教育技术和学习环境总监
教育技术与学习环境主任是伯明翰大学新设立的职位,将在开发教学和学习物理和数字基础设施方面提供关键的领导力和服务交付专业知识。为了实现大学到 2030 年跻身全球前 50 名机构的宏伟目标,教育技术与学习环境主任将负责以创新和有凝聚力的方式开发、维护和优化利用支持教育交付的技术。这将包括帮助塑造技术在教育交付中的使用方式,并负责定义我们如何在整个大学开发和使用教学和学习空间。
材料在太空环境中的行为-DTIC
讨论了在空间各个区域遇到的环境对几种工程材料的定量效应。在空间真空中,镁的升华在升高的温度下;锌和镉在普通温度下。大多数其他工程师将不受真空影响,除了略微的表面粗糙。在有机物,多硫化物,纤维素,丙烯酸酯,聚氯乙烯,新prene以及一些尼龙,多酯,环氧脂蛋白,聚氨酸酯和醇酸酯中,在真空中的温度相当低的温度下分解。聚乙烯,聚丙烯,大多数氟化合物和硅树脂在250'C以下的真空中不会显着分解。除了增塑材料外,没有明显的升华或分解,在真空中的工程临时损失显着损失。同样,在1个大气处的气密墙的墙壁逃脱也不会引起人们的关注。
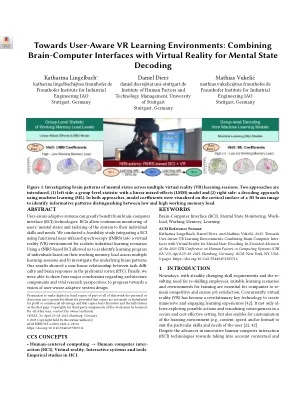
迈向用户意识的VR学习环境
用户意识的自适应系统可以大大受益于脑部计算机界面(BCI)技术。bcis允许对用户的心理状态进行持续监控,并根据其个人技能和需求量身定制系统。我们进行了一项可行性研究,该研究使用功能性近红外光谱(FNIRS)整合了BCI,以纳入虚拟现实(VR)环境,以实现现实的工业学习方案。使用基于FNIRS的BCI允许我们a)基于个人在多个学习课程中的工作记忆负荷确定学习进度,b)研究基本的大脑模式。我们的结果表明,在额叶皮层(PFC)中,任务困难与大脑反应之间存在非线性关系。最后,我们能够就建筑组件和重要的研究观点得出四个主要结论,以朝着用户意识的自适应系统设计的愿景迈进。

在人类环境中建造智能机器人
安德鲁·米勒(Andrew Miller)和彼得·K·艾伦(Peter K. Allen)。“ graspit!:用于机器人抓握的多功能模拟器”。IEEE机器人技术和自动化杂志,第11期,第4号,2004年12月,第4页,第4页,110-122。110-122。
VERA:虚拟环境记录注意力
摘要 — 患有注意力缺陷多动障碍 (ADHD) 的儿童在日常生活中表现出不同的症状,例如难以集中注意力、冲动、难以调节运动功能等。最常用的治疗方法是药物治疗,但会产生副作用。另一种解决方案是行为治疗,但似乎并不比药物治疗效果更好,而且成本更高。一种越来越受关注的新方法是使用神经反馈 (NF) 来教患者自己调节症状,通过以可理解的形式可视化大脑活动。此外,虚拟现实 (VR) 是 ADHD 背景下 NF 的支持环境。然而,在进行 NF 之前,确定与症状表现相对应的生理信号特征非常重要。我们在此提出了一个新框架,该框架基于可嵌入 VR 耳机的设备对脑电图 (EEG) 和视线方向的联合测量,目标是估计注意力状态。在信号采集的同时,执行注意力任务来标记生理信号。从信号中提取特征,并应用机器学习 (ML) 模型来检索注意力状态。这项初步研究提供了令人鼓舞的结果,能够在多种情况下做出正确的分类。此外,带有标记生理信号的数据集正在开发中。这将有助于更好地理解 ADHD 症状背后的机制。关键词 —虚拟现实、眼动追踪、脑机接口、机器学习

从实时环境到森林未来主义
摘要森林是多重时间性的区域。它们记录时间,并通过计时实践构成。环境监测和管理的数字技术越来越多地组织森林的时间性。本文探讨了新兴的技术时间性如何测量、调整和改变森林世界,同时再现和重新配置殖民和资本主义技术的更长持续时间。我们汇集了关于政治森林、数字媒体时间性以及反殖民和土著思想的学术研究,以分析通过数字技术实现的时间政治,并塑造森林的过去、现在和未来是可感知和可能的。特别是,我们追踪“实时”的社会技术生产,将其作为体验、了解和治理森林环境的时间记录。通过分析亚马逊地区的实时森林砍伐警报系统,我们思考了这些时间性如何使即时、连续的森林数据变得有价值,这些数据可用于了解和保护森林,同时又掩盖了依赖于剥夺、开采和圈地的长期殖民主义和资本主义森林框架。本文的后半部分转向土著未来主义以及重新塑造森林时间性的数字平台的艺术和社会政治用途。通过分析这些多重且有时相互矛盾的时间性,我们认为这些实践和干预措施可以通过时间性、土地和数据主权的多元化和再分配配置来挑战主流时间线及其不平等。

在 GPS 拒绝环境中提供时间
作者注:学员 Bridgham、Lambert、Moe 和 Morin 是美国军事学院四年级学生,分别来自系统工程系和数学科学系。系统工程系教授 Timothy Elkins 博士是该小组的顾问。摘要:可靠定位、导航和授时 (APNT) 是利用全球定位系统 (GPS) 进行作战使用的系统的高级储备。如果 GPS 性能下降或不准确,APNT 可提供备份以维持作战和准备状态。有关 APNT 的准确信息(重点是分配时间)是掌控战场和取得战术和作战成功的关键,因为如果时间不同步,通信、智能武器和安全系统可能会无法运行。研究小组着手寻找一种替代技术或系统,为军用旋翼飞机提供 APNT(重点是时间)。通过我们的分析,团队确定了具体的高级功能和目标,筛选了可能的解决方案,并权衡了最终的系统以确定最佳匹配。总体而言,铱星卫星得分最高,是最佳考虑的解决方案。关键词:GPS、APNT、计时、IMU、航空、系统决策过程
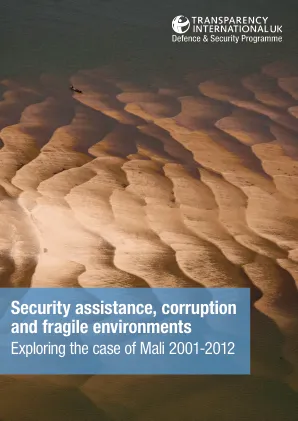
安全援助、腐败和脆弱环境
2002 年至 2012 年军事政变期间,马里从多个捐助国和多个资金渠道获得了国际援助,其中最重要的一揽子计划来自美国和法国。为了应对撒哈拉以南非洲地区恐怖主义网络的崛起,美国开始通过泛萨赫勒倡议 (PSI) 和跨撒哈拉反恐伙伴关系 (TSCTP) 等计划加强萨赫勒国家(包括马里)的能力,并最终于 2008 年成立了非洲地区军事司令部 (AFRICOM)。4 作为该地区的前殖民国家,法国也参与了萨赫勒地区的能力建设,主要是通过地区维和培训中心。 5 但在 2012 年,接受美国和法国军事援助计划的马里军队未能阻止撒哈拉图阿雷格叛军的入侵,这些叛军因卡扎菲时代结束后利比亚战士的涌入而壮大,最初还得到伊斯兰马格里布基地组织 (AQIM) 成员的支持。随后,部分军队部队发动政变,推翻了马里的民选政府。国家机构能力和韧性的缺乏,再加上腐败,再加上外部因素和内部挑战,使得马里政府无法应对该国面临的挑战。

对抗环境下的物流战争创新
机器人和无人系统教育与研究联盟 (CRUSER) 主办的战争创新连续体 (WIC) 研讨会于 2019 年 9 月 23 日至 26 日在加利福尼亚州蒙特雷的海军研究生院 (NPS) 校园举行。为期三天半的体验让 NPS 学生与教职员工、舰队军官以及来自海军实验室和工业界的来访工程师进行了有针对性的互动。研讨会在上午的最终概念简报和富有成效的讨论中结束,讨论无人系统在未来海军部队中的作用。本次研讨会还直接支持了海军部长 (SECNAV) 的指示,即 CRUSER 促进在海战领域开发机器人和自主系统的可操作作战概念,并与我们的行业合作伙伴合作。

复杂动态环境中的微状态 - BORIS
图 4 EEG 和伪影:(a) 参考点的变化降低了频谱中的飞机结构振动模式,如飞行前和飞行时 Cz 电极中的原始信号所示。(b) 和 (c) 中显示了 ICA 表征的一些说明性伪影。我们选择了相应 IC 活动的 1 分钟特征段。数据被分段以方便可视化。发动机故障发生在第 30 段左右。(b) 显示与发动机相关的组件,其活动呈现周期性模式,当发动机关闭时停止。(c) 说明与参与者运动相关的组件,其特征是短暂的峰值