XiaoMi-AI文件搜索系统
World File Search SystemEveryday

BEHAVIOR-1K:具有 1,000 个日常活动和现实模拟的具身 AI 基准
摘要:我们提出了 BEHAVIOR-1K,一个以人为本的机器人综合模拟基准。BEHAVIOR-1K 包括两个部分,分别由“您希望机器人为您做什么?”这一广泛调查的结果指导和推动。第一个部分是定义 1,000 种日常活动,基于 50 个场景(房屋、花园、餐厅、办公室等),其中有 5,000 多个对象,并标注了丰富的物理和语义属性。第二个部分是 O MNI G IBSON,这是一个新颖的模拟环境,它通过逼真的物理模拟和刚体、可变形体和液体的渲染来支持这些活动。我们的实验表明,BEHAVIOR-1K 中的活动是长期的并且依赖于复杂的操作技能,这两者对于最先进的机器人学习解决方案来说仍然是一个挑战。为了校准 BEHAVIOR-1K 的模拟与现实之间的差距,我们提供了一项初步研究,研究如何在模拟公寓中使用移动机械手学到的解决方案转移到现实世界中。我们希望 BEHAVIOR-1K 的人性化本质、多样性和现实性能够使其对具身化 AI 和机器人学习研究有价值。项目网站:https://behavior.stanford.edu。


帮助用户在日常生活中采用和委托自主代理
2 文献综述 11 2.1 与自主代理的交互 .......................11 2.1.1 专家自主代理 ......................11 2.1.2 响应基于代理的决策支持系统 .......12 2.1.3 日常情况下的自主代理 ............14 2.1.4 改善与自主代理的交互 ..........16 2.2 基于食品的实践 ..............。。。。。。。。。。。。。。18 2.2.1 食品 HCI 。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 2.2.2 蔬菜盒方案。。。。。。。。。。。。。。。。。。。。。。。.....20 2.2.3 团购 ...。。。。。。。。。。。。。。。。。。。。。。。。。。22 2.3 行为经济学。。。。。。。。。。。。。。。。。。。。。。。。。。。。。22 2.3.1 方法。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 2.3.2 最后通牒博弈。。。。。。。。。。。。。。。。。。。。。。。。。24 2.4 总结。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。25
了解老年人对使用人工智能日常技术的看法和挑战
人工智能 (AI) 支持的日常技术可以帮助解决与年龄相关的挑战,如身体障碍和认知能力下降。虽然最近的研究研究了老年人使用特定 AI 产品(例如对话代理和辅助机器人)的体验,但老年人对当前 AI 支持的日常技术的总体看法和体验仍然未知,这可能会影响他们对未来 AI 支持的产品的采用。我们对老年人进行了一项调查研究(N=41)和半结构化访谈(N=15),以了解他们对 AI 的体验和看法。我们发现老年人热衷于学习和使用 AI 支持的产品,但他们缺乏学习途径。此外,他们担心 AI 支持的产品会超出他们的预期、侵犯他们的隐私或影响他们的决策能力。因此,他们对 AI 支持的产品(如 AI、助手或对手)持有不同的看法。我们最后提出了设计建议,让老年人感到包容、安全,并能控制他们与 AI 支持产品的互动。

了解老年人在使用人工智能日常技术方面的看法和挑战
人工智能 (AI) 支持的日常技术可以帮助解决与年龄相关的挑战,如身体障碍和认知衰退。虽然最近的研究研究了老年人使用特定 AI 产品(例如对话代理和辅助机器人)的体验,但老年人如何看待和体验当前的 AI 日常技术仍然未知,这可能会影响他们对未来 AI 产品的采用。我们对老年人进行了一项调查研究(N=41)和半结构化访谈(N=15),以了解他们对 AI 的体验和看法。我们发现老年人热衷于学习和使用 AI 产品,但他们缺乏学习途径。此外,他们还担心 AI 产品会超出他们的预期、侵犯他们的隐私或影响他们的决策能力。因此,他们对人工智能产品(如人工智能、辅助或对手)持有不同的看法。我们最后提出了设计建议,让老年人感到包容、安全,并能控制他们与人工智能产品的互动。
劳工与“日常经济”:生活成本政治与竞争法如何
Jon 专注于监管政策挑战,并为企业和个人提供政治关系、公司治理、争议解决和声誉管理方面的咨询。Jon 拥有政党、法律和行业部门之间的联系,以及对竞争和反垄断事务中出现的沟通挑战的特别了解,他曾与领先的律师事务所合作处理各种交易和调查,Jon 领导 DRD 的竞争和反垄断业务。2021 年,Jon 推出了商业银行解决方案服务 (BBRS)。此前,他是 Brunswick 的合伙人兼公共事务主管。在此之前,Jon 在万博宣伟工作了 21 年,最近担任其英国公司、金融和公共事务业务以及曼彻斯特办事处的主席。接受咨询的客户包括体育商业、媒体、重工业、原材料、技术、生命科学、休闲、贸易和专业服务领域的人士。

迈向日常任务中灵活机器人操纵的知识工程方法
摘要在过去的十年中,家用机器人技术取得了巨大进步,使机器人能够自主完成家庭任务。这些机器人通常用于特定任务和/或对象。我们假设可以通过基于知识的方法来克服实现新的临时任务请求方面缺乏灵活性,从而允许机器人推断如何解决新任务或在新对象上执行已知任务。朝向这个目标,我们提出了一种基于知识的方法,该方法利用网络上已经存在的知识来构建一个本体学支持机器人在推理参数的推理中,这些参数会影响操纵动作,以执行一系列对象的任务变化1。本体论包括对象和动作信息,涵盖了处置和负担以及特定于任务的属性。作为概念验证,我们通过从相关本体论中导入和链接知识来手动构建食物切割本体,此外还可以从非结构化的网络来源提取和语义增强知识。我们演示了机器人如何查询本体,并将包含的信息转化为动作参数。我们通过模拟访问本体的机器人来评估创建的本体论的可行性,以执行切割任务变化的操作参数化。

p-rag:逐步检索增强产生,用于计划体现的日常任务
体现的日常任务是体现的AI社区中的一项流行任务,要求代理商根据自然语言说明和视觉观察做出一系列动作。传统的基于学习的方法面临两个挑战。首先,自然语言指令通常缺乏明确的任务计划。其次,需要进行高度培训才能为模型提供对任务环境的了解。以前基于大语言模型(LLM)的作品要么由于缺乏任务特定知识而遭受性能差,要么依靠地面真理作为少数样本。为了解决上述局限性,我们提出了一种称为渐进检索增强发电(P-rag)的新颖方法,该方法不仅有效地利用了LLMS的强大语言处理能力,而且还逐渐积累了特定于任务的知识而没有地面真相。与传统的抹布方法相比,该方法以单发方式从数据基础中检索相关信息以协助生成,p-rag引入了一种迭代方法来逐步更新数据库。在每次迭代中,p-rag检索最新数据库,并从上一个相互作用中获取历史信息,作为当前交互的经验参考。此外,我们还引入了一个更精细的检索计划,该计划不仅可以检索相似的任务,而且还结合了类似情况的检索,以提供更有价值的参考经验。广泛的实验表明,P-rag在不利用地面真理的情况下取得了竞争成果,甚至可以通过自我读取进一步提高绩效。

虚拟厨房协议用于测量日常备餐记忆功能
摘要:在本研究中,我们开发了虚拟厨房协议 (VKP),这是一种基于虚拟现实的日常膳食准备任务记忆功能测量方法。我们通过比较年轻人 (n = 41) 和没有神经认知诊断的老年人 (n = 52) 和有神经认知诊断的老年人 (n = 7) 的表现,以及通过检查与言语和视觉记忆标准化测量的相关性,调查了 VKP 的结构效度。结果表明,年轻人的回忆能力高于老年人,并且 VKP 对老年人的神经认知障碍很敏感。VKP 与其他记忆测试显示出中等到高度的相关性。这些结果支持 VKP 的结构效度,并表明它有望成为一种基于虚拟现实的膳食准备任务记忆测量方法。
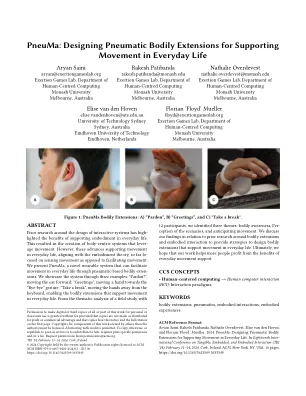
肺气:设计气动身体扩展以支持日常生活中的运动
围绕交互式系统设计的事先研究很大程度上点燃了在日常生活中支持实施例的好处。这导致创建了以身体为中心的系统来杠杆运动。然而,这些进步支持日常生活中的运动,与实施理论保持一致,到目前为止,与促进运动相反,它涉及感应运动。我们提出了一种新型的可穿戴系统,可以通过基于气动的身体延伸来促进日常生活的运动。我们通过三个示例展示了系统:“赦免?”,向前移动耳朵;“问候”,将一只手向“再见”手势;“休息一下”,将手从键盘上移开,从而实现了支持日常生活中运动的身体扩展。