XiaoMi-AI文件搜索系统
World File Search SystemFOV

mvcinn:使用深层交叉交流神经网络
糖尿病性视网膜病(DR)是造成运动年龄成人不可逆失明的主要原因。先前的DR检测模型在临床应用中遇到困难。主要原因是大多数以前的方法仅使用单视数据,而单个视野(FOV)仅占视网膜FOV的13%,从而导致大多数病变特征的丢失。为了减轻此问题,我们提出了一个用于DR检测的多视图模型,该模型可以充分利用涵盖几乎所有视网膜场的多视图图像。是特定的,我们设计了一个基于交互的自我注意模块(CISAM),该模块(CISAM)融合了从卷积块中提取的局部特征,该特征具有从变压器块中学到的远距离全局特征。此外,考虑到不同观点的病理关联,我们使用特征拼图来组装和学习多种视图的特征。具有34,452张图像的最新公共多视图MFIDDR数据集进行了广泛的实验,证明了我们方法的优越性,该方法对最新模型的表现有利。据我们所知,这项工作是公共大型多视图底面图像数据集的首次研究,用于DR检测。据我们所知,这项工作是公共大型多视图底面图像数据集的首次研究,用于DR检测。

主动 3D 成像激光雷达相机
1 激光雷达技术 相位检测 2 波长 860 nm 3 深度范围 可达 12 米 4 深度精度 < 10 cm,范围可达 5 米 5 更新率(摄像头) 5 Fps 6 FOV 90ºx60º 7 每帧 3D 点数 每帧 76800 个点 8 尺寸 370 x 275 x 246 mm 9 重量 8 Kg
为您的Zeiss X射线显微镜启用基于AI的重建
深索特恢复的图像的全范围。Zeiss DeepScout在大型FOV量中可以在各地提供高分辨率。在低分辨率下捕获一个较大的视野,并针对一个小区域。高分辨率扫描目标。 使用DeepScout以高分辨率恢复全卷。 现在,您可以以所需的分辨率检查整个样本,以识别,量化甚至分割样本多个区域的缺陷。高分辨率扫描目标。使用DeepScout以高分辨率恢复全卷。现在,您可以以所需的分辨率检查整个样本,以识别,量化甚至分割样本多个区域的缺陷。
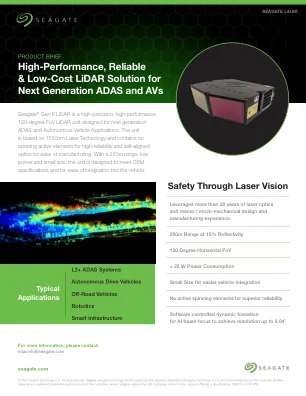
产品简短的高性能,可靠和低成本激光雷德解决下一代ADA和AVS
Seagate®Gen 6 LiDAR是一种高精度,高性能的120度FOV LIDAR单元,旨在下一代ADA和自动驾驶汽车应用。该设备基于1550nm激光技术,并且不包含用于高可靠性和自我对准光学元件的旋转活动元素,以易于制造。具有250m范围,低功率和小尺寸的设备旨在满足OEM规范,并易于集成到车辆中。
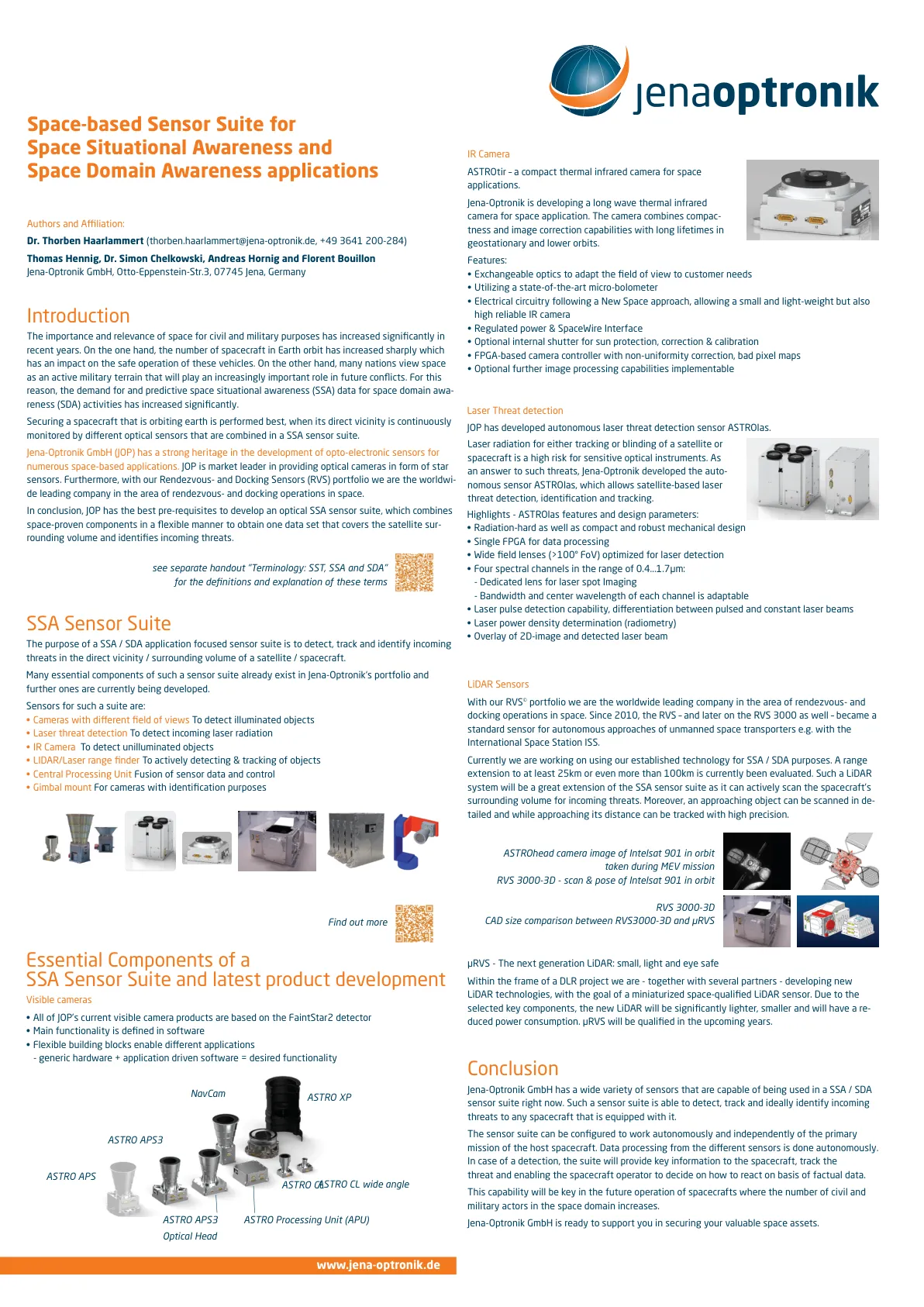
用于空间态势感知和空间领域感知应用的空间传感器套件
亮点 - ASTROlas 特点和设计参数:• 抗辐射以及紧凑坚固的机械设计• 用于数据处理的单个 FPGA• 针对激光检测优化的广角镜头(>100° FoV)• 四个光谱通道,范围为 0.4...1.7µm:- 用于激光点成像的专用镜头- 每个通道的带宽和中心波长均可调整• 激光脉冲检测能力,区分脉冲和恒定激光束• 激光功率密度测定(辐射测量)• 2D 图像和检测到的激光束的叠加

尼尔·格雷尔斯·斯威夫特天文台技术手册 17.0 版
1 Swift 仪器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 19 6 BAT 频谱。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 23 7 XRT PSF。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 26 8 Cas A 的 XRT 谱。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 . ... 34 13 快速数据中心数据流 . ...
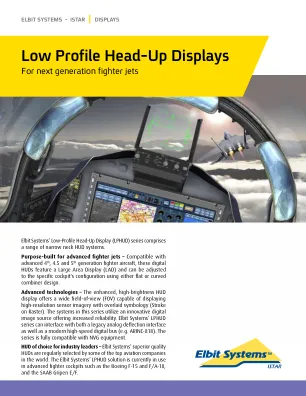
低调平视显示器 - Elbit Systems UK
先进技术 – 增强型高亮度 HUD 显示器提供宽视野 (FOV),能够显示带有叠加符号(光栅上的笔划)的高分辨率传感器图像。该系列中的系统采用创新的数字图像源,可提高可靠性。Elbit Systems 的 LPHUD 系列既可以与传统的模拟偏转接口连接,也可以与现代高速数字总线(例如 ARINC-818)连接。该系列与 NVG 设备完全兼容。

室内定位和4D MMWave成像雷达
状态估计是成功实施机器人系统的关键组成部分,依赖于相机,LIDAR和IMU等传感器。然而,在现实情况下,这些传感器的性能是通过具有挑战性的环境来划分的,例如不利的天气条件和弱光场景。新兴的4D成像雷达技术能够在不利条件下提供强大的感知。尽管有潜力,但对于嘈杂的雷达数据没有明确的几何特征而言,室内环境仍然存在挑战。此外,雷达数据分解和视野(FOV)的差异可能导致不准确的测量结果。虽然先前的研究探索了基于多普勒速度信息的雷达惯性探测仪,但由于FOV和雷达传感器的分辨率差异,估计3D运动的挑战仍然存在。在本文中,我们解决了多普勒速度测量不确定性。我们提出了一种在管理多普勒速度不确定性的同时优化车身速度的方法。基于我们的观察结果,我们提出了双成像雷达配置,以减轻雷达数据中差异的挑战。为了获得高精度3D状态估计,我们引入了一种策略,该策略将雷达数据与消费级IMU传感器无缝整合,并使用固定lag平滑光滑优化。最后,我们使用现实世界3D运动数据评估了我们的方法,并演示了本地化和映射的流任务。
ROS 介导的 EGFR 靶向纳米二氧化铈的抗癌作用
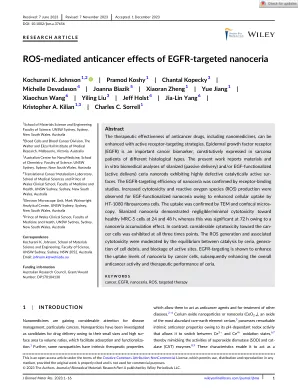
图 7 FITC 标记的 EGF-纳米粒子(绿色)的共聚焦成像,显示 HT-1080 细胞的细胞摄取(蓝色:Hoechst)(每个时间点:顶行 = 20 X,底行 = 63 X;比例尺:20 μ m [20 X] 和 10 μ m [63 X];20 X 和 63 X 图像是在不同的视野 (FoV) 下拍摄的,因此每个细胞中的纳米粒子密度不能直接比较)。EGF,表皮生长因子;FITC,荧光素-5-异硫氰酸酯。

厨房:用于6D物体姿势估算厨房环境中的现实世界基准和数据集
摘要 - 尽管最近在6D对象构成了机器人抓握的方法方面取得了进展,但在现有数据集中这些甲基多种多样的能力与现实世界中的握把和移动操作任务之间的功能之间存在很大的表现差距,尤其是当机器人完全依靠其单声学egocentric领域(Fov)。现有的现实世界数据集主要关注桌面抓地力方案,其中机器人臂放在固定位置,并且对象集中在固定外部相机的FOV中。评估此类数据集上的性能可能无法准确反映厨房环境中日常抓握和移动操作任务所面临的挑战,例如从较高的架子,水槽,洗碗机,烤箱,冰箱,冰箱或微波炉中检索物体。为了解决这一差距,我们提出了厨房,这是一种专门估算厨房环境中各个位置的物体的6D姿势的新颖基准测试。为此,我们录制了一个全面的数据集,该数据集包含约205K现实世界的RGBD图像,用于在两个不同的厨房中捕获的111个厨房对象,利用具有以自我为中心的人的人形机器人。随后,我们开发了一个半自动的注释管道,以简化此类数据集的标签过程,从而产生2D对象标签,2D对象分割掩码和6D对象,并以最少的人为努力构成。基准,数据集和注释管道可在https://kitchen-dataset.github.io/kitchen上公开获得。