XiaoMi-AI文件搜索系统
World File Search SystemFOV

高光谱成像用于硅纳米柱阵列的高通量、空间分辨光谱散射测量
摘要:现代高通量纳米图案化技术(如纳米压印光刻技术)使得在大面积基底(cm 2 至 m 2 规模)上制造纳米结构阵列(尺寸为 10 至 100 纳米的特征)成为可能,例如硅晶片、玻璃片和柔性卷对卷网。制造这种大面积纳米结构阵列 (LNA) 的能力创造了广阔的设计空间,实现了广泛的应用,包括光学设备(例如线栅偏振器、透明导体、彩色滤光片和抗反射表面)以及电子元件的构建块(例如超级电容器、传感器和存储器架构)。然而,现有的计量方法将难以与制造方法一起扩展。例如,扫描电子显微镜 (SEM) 和原子力显微镜 (AFM) 具有微米级视场 (FOV),这妨碍了对以每分钟平方米的速度制造的 LNA 进行全面特性分析。散射测量方法具有更大的 FOV(通常为几百微米到几毫米),但传统散射测量系统一次只测量一个点的样品,这也使得它们对于大规模 LNA 制造来说太慢。在这项工作中,我们展示了使用高光谱成像对传统光谱散射测量方法进行并行化,将该技术的吞吐量提高了 106-107 倍。我们通过使用高光谱成像和反射光谱的逆向建模来展示这种方法,以微米级空间分辨率获得毫米和厘米级 Si 纳米柱阵列结构的三维几何数据。这项工作表明,可以对各种 LNA 进行几何测量,并有可能在大面积上实现高速测量,这对于未来的 LNA 制造至关重要。

发育性静脉异常静脉静脉冠军AVM和动脉自旋标记的MR成像的差异诊断
图像采集多相ASL协议是我们机构中最常用的序列,具有最佳的图像质量。因此,我们将系列限制在接受该方案的人中,以确保研究人群的可能性。我们应用了以下参数:TR/TE¼5871/11.0 ms;平均数¼1;截面厚度¼6毫米;切片数¼26 - 28;读数¼4螺旋臂640个样品; FOV¼240240毫米3;矩阵¼128128;和体素分辨率¼3.83.8 6.0毫米。在上一个报告中描述了用于获取多相ASL图像的技术的详细信息。12与ASL一起使用T2 Star - 加权血管造影(天鹅)检查所有患者。天鹅参数为TE¼21.5ms; Tr¼37.3ms;翻盖角¼300°;厚度¼1.2毫米;矩阵¼416256; FOV¼220220;切片数¼120。DSA是在Innova IGS 630(GE Healthcare)系统或Alluraclarity(Philips Healthcare)上进行的。进行了股动脉的穿刺和5F动脉鞘的插入后,进行了主要的椎动脉的选择性导管插入和双侧颈内动脉。通过对比度输送系统以5-6 mL/s的注射速率注入7 - 9 mL的对比介质。图像获得的频率分为3个阶段:前3秒钟每秒4帧,然后在接下来的3秒内每秒2帧,然后每秒1帧(随后的alluraclarity中为0.5帧)。

FH系列ID | Bi3FH系列ID | Bi3
Thermal Sensor & Optics Array Format (NTSC) 640 × 512 Detector Type Long-life, uncooled VOx microbolometer Pixel Pitch 17 μm Thermal Frame Rate NTSC: 30 Hz or PAL: 25 Hz / 8.3 Hz Optical Characteristics Model FOV Focal Length F/# 669 69° × 56° 9 mm F1.4 644 44° × 36° 13毫米F1.0 625 25°×18°25毫米F1.1 617 17°×14°×35 mm F1.1 612 12°×10°×10°50 mm F1.2 610 10°×8.2°×8.2°60 mm F1.2 608 8.6°×6.6°×6.6°75 mm for1.17.5 rangertry for 1.5 complars for1um for1um for1.17.5 comprild consextral formral formral formral formral formral for1um formands Spectrral formral formral formral formran (NEDT)<30 MK @ 25°C(77°F)F#1.0可见光照明摄像机传感器类型4K 2160P(3840×2160)光学特性模型默认FOV FOV焦距F/#669 98°×55°×55°×55°3.6-10 mm 1.5°1.5 -2.5-2.8 644 63°×35555555555-1.8 62-16-1.8 63°×33°MM MM MMMMMM MMMMMM ×20°9-22毫米1.4-1.7 617 24°×14°13-55毫米1.6-2.2 612 17°×10°×13-55毫米1.6-2.2 610 14°×8°×8°×8°13-55 mm 1.6-2.2 608 11°×6°×6°13-2.2 luntivity and IDETITION and IDETITY 0.2 lixt and IDETITY 0.2 lindiv tivide and lintivity and Iteide 0.2 lunt lunt tide Iteide and Iteide 0.2 lund Iteide and Iteide 0.2 lund lunt lunt (@(f1.6 agc on,30 fps)b/w:0.10 lux(@(f1.6 agc on,30 fps)可见帧速率30 Hz hz 264/h.265或m-jpeg的独立渠道或M-jpeg(除外4K),可见和热流分辨率分辨率和热流分辨率:热流:热:vga(640×51)(640×51), 4K(3840×2160),1080p(1920×1080),720p(1280×720)&VGA(640×480)次级流:热:Thermal:VGA(640×512),QVGA(320×256),可见(320×256) (640×480)热图像设置

Neuroxplorer的性能特征,下一代人脑PET/CT成像器
耶鲁大学,加利福尼亚大学,戴维斯大学和联合成像医疗保健的合作成功地开发了神经脱落者,这是一家专门的人脑宠物成像仪,具有高空间分辨率,高灵敏度和内置的3维相机,用于无标记的无效运动跟踪。它具有较高的相互作用和交流时间的分辨率,以及52.4厘米的横向视野(FOV)和扩展的轴向FOV(49.5厘米),以增强灵敏度。在这里,我们介绍了神经解释器的身体表征,性能评估和第一个人类图像。方法:对空间分辨率,灵敏度,计数率性能,能量和时序的测量以及图像质量进行了遵守国家电子制造商协会(NEMA)NU 2-2018标准。通过对Hoffman 3维脑幻影和迷你Derenzo phanmom的成像研究来证明该系统的性能。提出了来自健康志愿者的最初18个F-FDG图像。结果:通过过滤后的反射重建,径向和tan量的空间分辨率(最大宽度为一半)平均为1.64、2.06和2.51mm,轴向分辨率为2.73、2.89,2.89和2.93 mm的径向偏移量为1、10和20cm,相应的距离。平均交流分辨率为236 PS,能量分辨率为10.5%。NEMA敏感性分别为46.0和47.6 kCPS/MBQ,分别为10 cm偏移。在FOV中心达到了11.8%的敏感性。在58.0 kBQ/mL时,峰值噪声等效率为1.31 mcps,在5.3 kbq/mL时的散射分数为36.5%。峰值噪声当量计数率在峰值等效率下的最大计数率少于5%。在3次迭代时,NEMA图像质量对比度恢复系数从74.5%(10毫米球)到92.6%(37毫米球)不等,背景可变性在4.0:1的对比度为3.1%至1.4%。一个例子人脑18 F-FDG图像表现出很高的分辨率,在皮质和皮层结构中捕获了复杂的细节。结论:神经塑料提供了高灵敏度和高空间分辨率。具有长的轴向长度,它还可以实现高质量的脊髓成像和颈动脉的图像衍生的输入功能。这些绩效增强能力将大大扩大人脑宠物范式,方案的范围,从而扩大临床研究应用。
光通信终端(OCT)标准版本3.0
对于运动中的系统,例如航天器和飞机上使用的 OCT,系统必须各自跟踪其远程对应方以保持对准。此运动包括主机平台的一般飞行路径以及平台带来的抖动。OCT 的接收器通常具有相对较小的视场 (FOV),必须补偿这种低速率运动和高速率抖动。这可以通过使用远程信号作为测量参考的闭环跟踪系统来实现。通常将校正馈送到航向跟踪设备(例如万向节)以校正低速率运动,并馈送到快速跟踪设备(例如快速转向镜 (FSM))以校正高速率抖动。
2020 年小型卫星会议,论文 SSC20-III-09 BOWIE-M 的演讲:用于下一代气象业务的微波探测器
参数 ATMS Bowie 覆盖范围 (km) 30 25 HPBW 2.2 1.7 总扫描时间 (s) 2.67 2.52 RPM 22.47 23.97 恒定扫描速率 (°/秒) 134.83 143.88 角度测量范围 (°) 106.56 103.75 地球视场 沿轨道样本/IFOV 1.6 1-1.5 跨轨道样本/IFOV 1.98 1-1.5 样本 96 122 测量时间 (s) 0.79 0.72 积分时间 (ms) 8.23 5.91 注意:以上假设 ATMS 具有恒定扫描速率。可变扫描速率将 ATMS 积分时间增加到 18 ms。
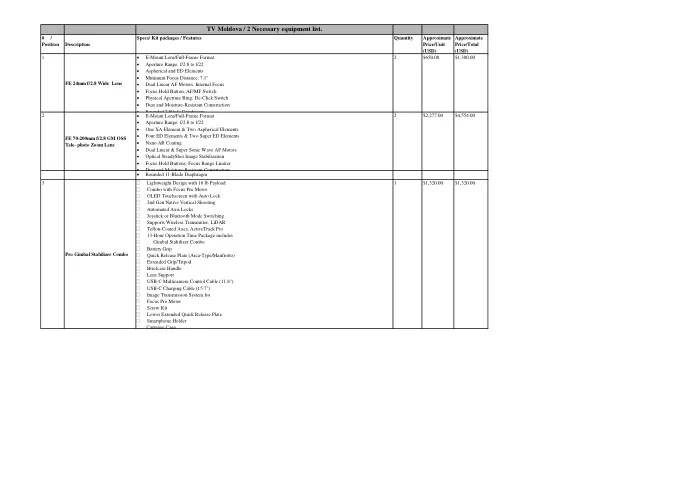
电视摩尔多瓦 / 2所必需的设备清单。
Maximum Horizontal Speed 47 mph / 75.6 km/h Maximum Flight Time 46 Minutes Number of Cameras 1 Camera System 20 MP, 4/3"-Type CMOS Sensor 24mm-Equivalent, f/2.8 Lens (84° FoV) Maximum Video Resolution Up to 5.1K at 50 fps / 1080p at 200 fps Sensing System Omnidirectional Control Method Included Transmitter with Smartphone/Mobile Device Maximum Operating Distance 6.2 Miles / 10 km Mobile Device Compatibility Devices up to 3.4" / 86 mm Wide Mobile App Compatible Yes: Android & iOS App Name: DJI Fly Weight 31.6 oz / 895 g (Takeoff) Rotor Configuration Quadcopter Propeller Size 9.4x5.3" Remote ID Yes Built-In Video Light No Aircraft I/O 1x USB-C (Data, Power, Service) Operating Temperature 14 to 104°F / -10到40°C,相机的成像数量1相机系统20 MP,4/3“ -Type CMOS传感器24mm-等效,f/2.8镜头(84°FOV)数字变焦3x最小重点距离3.3'/1 m ISO敏感性范围/1 M ISO敏感性范围/视频:100至6400到6400:800到6400(800至12,800 sups Speed 1/8000 fodus 1/8000 fodus 1/8000 fodus 1/8000 fodus 1/8000 voths speed 1/8000) 5.1K在50 fps/1080p时为200 fps时静止图像支撑高达20 MP(DNG/JPEG)照片模式自动曝光支架(AEB),突发射击,间隔,间隔,飞机MicroSD/MicroSDHC/MicroSDXC(UHS-I)的单射击媒体/存储卡插槽[U3/v30
光通信终端(OCT)标准 3.0 版
对于运动中的系统,例如航天器和飞机上使用的 OCT,系统必须各自跟踪其远程对应方以保持对准。此运动包括主机平台的一般飞行路径以及平台带来的抖动。OCT 的接收器通常具有相对较小的视场 (FOV),必须补偿这种低速率运动和高速率抖动。这可以通过使用远程信号作为测量参考的闭环跟踪系统来实现。校正通常馈送到航向跟踪设备(例如万向架)以校正低速率运动和快速跟踪设备(例如快速转向镜 (FSM))以校正高速率抖动。
星跟踪器电子设备的开发和实施
CCD - 电荷耦合器件 CCTV - 闭路电视 CMOS - 互补金属氧化物半导体 EMC - 电磁兼容性 FIFO - 先进先出 FOV - 视场 FPGA - 现场可编程门阵列 FPS - 每秒帧数 GUI - 图形用户界面 I 2 C - 集成电路间 iLCC - 无引线芯片载体 IO - 输入输出 KTH - 皇家技术大学 LASER - 受激发射光放大 LED - 发光二极管 LISA - 迷失空间算法 LVTTL - 低压晶体管-晶体管逻辑 MP - 百万像素 PCB - 印刷电路板 SEU - 单粒子翻转 SOC - 片上系统 SPI - 串行外设接口 SPP - 空间与等离子体物理学 UART - 通用异步接收器/发射器 USB - 通用串行总线 VHDL -(超高速集成电路)硬件描述语言
SIP智能移动平台的概述
项目概述本研究和开发介绍了配备PCSEL的3D PCSEL*-Lidar系统的开发。考虑基础设施传感器和测量在车辆附近潜在盲点的视野中,研发将首先开发出广泛的FOV机械3D PCSEL-LIDAR系统的原型。此外,非机械3D PCSEL-LIDAR系统将是原型和开发的,预计该系统将较小,成本较低,而将来的功率较低,并且该项目旨在获得比将来相同或更好的性能的可行性。还将开发使用3D PCSEL-LIDAR系统识别技术,并且将通过使用它们作为基础架构和板载传感器的试验测试来证明PCSEL-LIDAR系统的有效性。*PCSEL(光子晶体表面发射激光)