XiaoMi-AI文件搜索系统
World File Search SystemFOV
心脏磁共振晚期钆增强在心肌病中的作用
心脏 MR 检查 对所有参与者进行了标准 MR 检查,如下所示: 侦察图像:在正交平面中捕获以进行心脏长轴和短轴规划。 功能电影图像:在短轴平面、轴向平面以及 4 个腔平面中,使用 ECG 门控、稳态自由进动序列捕获。 通过重复屏气获取切片,应用以下参数:TR/TE:4.4/2.5。 FOV:根据患者的年龄在 250-350 毫米之间。 阶段:25。 NSA:1-2。 切片厚度:6-8 毫米,切片间隙:0 毫米。 矩阵:128x128。 利用观察锁定技术进行标准延迟钆增强成像以确定最佳延迟时间。 这是通过采用反转恢复平衡涡轮场回波 (IR-b-TFE) 实现的

生物医学光学中的深度学习 - Muyinatu Bell
生物医学光学是研究生物光与物质相互作用的学科,其总体目标是开发可用于诊断、治疗和外科手术的传感平台 [1]。在这个庞大而活跃的研究领域中,新系统不断被开发出来,以利用独特的光与物质相互作用来提供临床有用的特征。这些系统在信噪比 (SNR)、采集速度、空间分辨率、视场 (FOV) 和景深 (DOF) 方面面临固有的权衡。这些权衡会影响临床系统的成本、性能、可行性和整体影响。生物医学光学开发人员的作用是设计优化或理想地克服这些权衡的系统,以适当地满足临床需求。在过去的几十年里,生物医学光学系统设计、图像形成和图像分析主要由经典的物理建模和信号处理方法指导。然而,最近,深度

Signa™PET/MR技术数据
Signa Pet/MR是为希望宠物成像的无限潜力的医师和物理学家设计的。它基于基于lutetium的闪光灯(LBS)一种创新的MR兼容硅光电塑料(SIPM)技术。SIPMS解决了其他技术的局限性,提供了出色的TOF时正时分辨率,下一代光电倍增器的高增益和低噪声。磅晶体具有高光输出,快速的时机和停止功率以实现TOF PET。sipms由主动和被动(水冷却)热补偿仔细支撑。探测器位于3.0T磁铁的同中心,并提供25厘米的FOV。首次,LBS和SIPM的组合使Signa Pet/MR能够与3.0T MR成像同时执行TOF PET。

空间碎片激光测距
夜间可视化需要使用孔径为 20 至 30 厘米的望远镜。由于直径为 20 厘米的空间碎片激光组件的出口孔径符合与孔径相关的规格,因此可以使用安装在空间碎片激光组件中的卫星摄像机进行夜间引导。对于具有比卫星摄像机的 FOV(视场)更大的角度偏移的目标的可视化,可以使用 Stare & Chase 望远镜。即使是夜间可以使用空间碎片激光系统测距的最小物体,也可以在两个摄像机中可视化。假设反射率为 20%,距离 600 公里的直径为 10 厘米的球形物体的亮度将为 11 mag。距离 1400 公里的直径为 50 厘米的球形物体将具有类似的亮度。对于最暗的物体,积分时间必须增加到几十分之一秒。
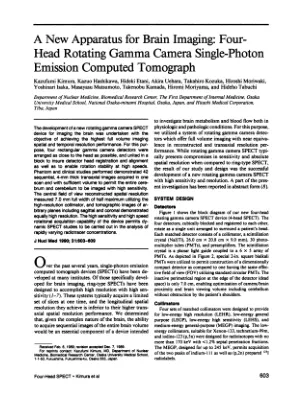
四头旋转伽马摄像头单光子
图1显示了我们新的四头旋转山果聚接受仪的框图(4个字母)。四轨分隔器(立方体封闭)并在彼此注册的情况下,旋转为单个固定,以包围患者的头部。每个匹配仪表仪,闪烁晶体(NAI(TL),26.0 cm x 20.8 cm x 9.0毫米),30张照片乘数管(PMTS)和前置仪。闪烁晶体是一个平面光导向,耦合到6 x 5阵列的PMT。如描绘的素图2,Special2-In。平方bialkali pmtswereutilized允许尺寸紧缩的尺寸紧凑型to虫,使用标准圆形PMT的一个具有相同效率的效果场(FOV)。探测器的边缘(死空间)的边缘仅为7.0厘米,摄像机/脑接近和大脑观察体积的启示剂,包括小脑,而没有患者的肩膀。
操作概念描述更新 - RETINA
ADS-B 自动相关监视 – 广播式 AH 抽象层次结构 AOIS 航空运行信息系统 AR 增强现实 A-SMGCS 先进地面运动引导和控制系统 ATC 空中交通管制 ATCO 空中交通管制操作员 ATCR 空中交通管制雷达 ATM 空中交通管理 COO 协调员 CTOT 计算的起飞时间 CWP 管制员工作位置 DEL 交付 DTD 接地距离 EID 生态界面设计 EOBT 预计起飞时间 ER 探索性研究 ETOT 预计起飞时间 FDP 飞行数据处理 FOV 视场 GGV 注视、手势、语音 GND 地面 HDE 低头设备 HMD 头戴式显示器 ICAO 国际民用航空组织 IFR 仪表飞行规则 IHP 中间等待点 ILS 仪表着陆系统 IMC 仪表气象条件 JU 联合承诺 LOC 航向道 LVP 低能见度程序 OOT 离开塔台 PP 伪飞行员 PSR 主监视雷达雷达无线电探测和测距
作战概念描述更新 - RETINA
ADS-B 广播式自动相关监视 AH 抽象层次 AOIS 航空运行信息系统 AR 增强现实 A-SMGCS 先进地面移动引导和控制系统 ATC 空中交通管制 ATCO 空中交通管制操作员 ATCR 空中交通管制雷达 ATM 空中交通管理 COO 协调员 CTOT 计算的起飞时间 CWP 管制员工作位置 DEL 交付 DTD 接地距离 EID 生态界面设计 EOBT 预计起飞时间 ER 探索性研究 ETOT 预计起飞时间 FDP 飞行数据处理 FOV 视场 GGV 注视、手势、语音 GND 地面 HDE 低头设备 HMD 头戴式显示器 ICAO 国际民用航空组织 IFR 仪表飞行规则 IHP 中间等待点 ILS 仪表着陆系统 IMC 仪表气象条件 JU 联合承诺 LOC 航向道 LVP 低能见度程序 OOT 离开塔台 PP 伪飞行员 PSR 主监视 RADAR 雷达无线电探测与测距
X射线ptychography带有多个光束
X射线Ptychography的未来(一种连贯的衍射成像方法)有望实现的分辨率和实验效率,同时探测了越来越复杂的样品的特征。这是通过复杂的成像方法启用的,结合了高度优化的硬件,软件和过程。在本文中,解决了X射线ptychography实验的几个方面,强调了通过使用多个光束实现的增强的多功能性和有效性。从对纳米化的全面理解开始,讨论了聚焦X射线光学的生产。具体而言,开发了直接作品的岩性过程,并描述了其细节,特别强调了在50 kV加速度电压下在化学上半弹性抗性的情况下进行电子束光刻。此过程既多功能又精确,最终促进了菲涅尔区板(FZP)的制造。因此,论文报告了几个并联的几个FZP的应用,用于生成多个X射线梁以执行Ptychography。特别是研究了对标准Ptychographic方法的新型扩展。对多光束X射线PTYChography的研究始于紧密间隔的FZP,以线性阵列排列在同一芯片上,模拟和推进了先前关于该主题的研究,并证明了自制硬件的准备就绪,以实现更复杂的实现。最值得注意的是,FZP彼此之间的接近48 µm,并且最多可以使用三个梁,从而将视场(FOV)扩展了三倍。接下来,引入了一种新颖的设置,在多光束X射线ptychography的背景下促进了适应性的概念,这要归功于堆叠和机动的FZP。在测量之间将焦点光学元件移动的可能性赋予上述设置前所未有的多功能性。对于实验,样本更改或检测条件的每个新迭代,光学元件不必重新设计。足以使用各自的电机并将设置适应新的测量值。金纳米晶簇用各种梁的间距成像,从而在样品上同样间隔区域进行成像,并将FOV扩展到两个倍。这种设置的成功导致其在更复杂的测量中实现,最终导致表现出同时的多光束和多块Ptychography,这两个从未被放在一起。两层样品,与单光束Ptychographichographic测量值相比,层到层的分离范围从1400 µm降至100 µm,分辨率没有损害。最后,FZP的聚焦作用与策划

SPIE的会议录
增强现实(AR)展示是多年来一直是一个热门话题,因为它们为高投资回报提供了潜力。在AR显示器和智能眼镜在市场上更加接受之前,有许多技术挑战将出现许多技术挑战。技术挑战之一是紧凑而轻巧的光学器件的光学设计,能够将增强图像投影到视力线上,并舒适。在波导技术中正在取得重大进步,以生产大型FOV和眼箱。同样,轻型发动机也被开发为较不笨重,更高效。在本文中,我们介绍了有关如何通过Trilite Technologies开发的下一代激光束扫描仪(LBS)的见解,可以与不同的组合器集成并为不同的AR显示器和智能眼镜架构实施。LBS的独特设计借出了自身,以不同的配置为不同的配置,如波导和组合器的不同设计和布局所决定的。此外,下一代磅的极低剖面使眼镜从字面上看聪明。关键字:激光束扫描,LBS,AR,XR,VR,HMD,Microdisplays

USV跟踪器
本文介绍了USV-Tracker,这是一种针对用于实用应用(例如地表调查和目标跟踪)的无人层面车辆(USV)的新型跟踪系统。该系统应对三个关键挑战:感知鲁棒性,跟踪隐藏和计划效率。这项工作的贡献是多方面的:(1)使用扩展的卡尔曼滤波器(EKF)的多传感器融合框架来增强目标检测和定位准确性,集成了来自相机,激光镜头,GPS和IMU传感器的数据。(2)一种两阶段的路径计划算法,该算法生成遮挡避免轨迹并采用虚拟弹性力约束来保持适当的相对定位。在密集的障碍环境中,该算法倾向于靠近目标,并结合了FOV取向约束以确保稳定的感知。(3)一种可见性感知的控制策略,可通过基于EKF的轨迹预测来确保持续的目标可观察性。凉亭中的模拟和相应的物理实验验证了系统的有效性和鲁棒性,证明了其在现实世界中的适用性。计算工作负载是在受约束的车载计算机上管理的,强调了系统的实用性。