XiaoMi-AI文件搜索系统
World File Search SystemFast
快速事实
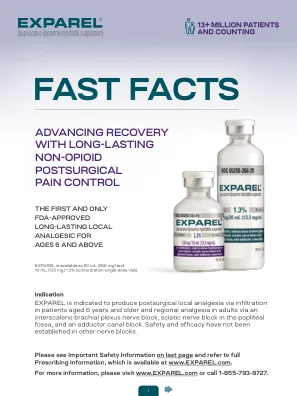
• The 133 mg (10 mL) and 266 mg (20 mL) doses of EXPAREL are available in cartons of 4 and 10 vials • EXPAREL vials should be stored and refrigerated between 2°C to 8°C (36°F to 46°F) • Sealed, intact (unopened) EXPAREL vials may be held at a controlled room temperature of 20°C to 25°C (68°F至77°F)最多30天。小瓶不应重新填充•不应冷冻膨胀•长期不应长时间暴露于高温(> 40°C或104°F)•长期内•如果不怀疑被冻结或暴露于高温下,则不应在视觉上进行视觉检查。如果塞子凸起,请勿使用小瓶•应在4小时内使用exparel的开放小瓶•exparel的小瓶多次将小瓶重悬于从小瓶中撤回之前的颗粒,然后再恢复颗粒。

快速事实_NA_修订_V6
Li-Cycle 正在支持全球向电气化转变。通过我们获得专利且经过验证的 Spoke & Hub Technologies™,我们可以回收锂离子电池和电池制造废料中发现的宝贵关键矿物,并将其返回供应链。Li-Cycle 对可持续发展的承诺是我们业务模式的核心,并通过产生最少固体废物流、废水排放和低空气排放的工艺来证明这一点。