XiaoMi-AI文件搜索系统
World File Search SystemFi
Baloise 集团 2021 年度回顾 - UNEP FI
Baloise 的目标不仅仅是成为一家保险公司。我们的目标是在人们的生活中发挥重要作用。凭借 150 多年的保险提供商经验,我们正在转变企业文化,以满足客户在数字时代对安全和服务不断变化的需求。我们的“简单安全”战略现已进入第二阶段(第 2 季),追求三个核心目标:我们希望成为一流的雇主、客户的首选提供商以及投资者可靠且有吸引力的投资主张。Baloise 价值创造流程(见第 26 页)也是我们可持续发展战略的基础。它提供了 Baloise 如何在六种资源(投资者、员工、客户、合作伙伴、环境和社会)中创造价值的综合视图。本报告旨在从综合角度说明 Baloise 的价值创造。本报告涵盖了业务战略和业务模式,并包含有关 Baloise 集团 2021 年活动的深入信息。它还概述了 Baloise 活动的经济、社会和环境影响。Baloise 的价值创造过程和任何相关披露均基于国际综合报告委员会 (IIRC) 的综合报告框架 ( 框架)。在 IIRC 和可持续发展会计准则委员会 (SASB) 合并成立价值报告基金会 (VRF) 之后,我们密切关注市场在披露标准尤其是 SASB 标准方面的发展。我们的重要性评估已经与 SASB 标准紧密一致。VRF 与 IFRS 基金会的合并已宣布将于 2022 年 6 月进行,这将为披露标准的进一步发展提供额外动力,我们将对此进行密切监控。我们将在未来的报告和未来报告标准的决策中考虑这些过程的结果。

ZnO 杂化薄膜的定向协同自组装
受二嵌段共聚物 (DBC) 丰富的相分离行为启发,二嵌段共聚物 (DBC) 和无机前体的协同自组装 (共组装) 可以实现具有所需尺寸的多种功能纳米结构。在采用聚苯乙烯嵌段聚氧化乙烯和 ZnO 的 DBC 辅助溶胶-凝胶化学方法中,通过狭缝模头涂层形成混合薄膜。打印纯 DBC 薄膜作为对照。进行原位掠入射小角度 X 射线散射测量,以研究薄膜形成过程中的自组装和共组装过程。结合互补的非原位表征,区分出几种不同的方式以描述从最初的溶剂分散到最终固化的薄膜的形态转变。组装途径的比较表明,建立纯 DBC 薄膜的关键步骤是球形胶束向圆柱形域的聚结。由于存在相选择性前体,溶液中圆柱形聚集体的形成对于混合膜的结构发展至关重要。墨水中预先存在的圆柱体阻碍了混合膜在随后的干燥过程中的域生长。前体降低了有序度,防止了 PEO 嵌段的结晶,并在混合膜中引入了额外的长度尺度。

₹ 3760cr 电池能源可行性缺口融资......
印度政府周三批准了 376 亿卢比可行性缺口融资 (VGF) 计划,用于开发电池储能系统 (BESS)。政府表示:“批准的计划计划到 203031 年开发 4000 兆瓦时 (MWh) 的 BESS 项目,并以 VGF 的形式提供相当于资本成本 40% 的预算支持。”政府还补充道,此举是政府采取的一系列环保措施中的分水岭,预计将降低电池储能系统的成本,提高其可行性。该计划旨在利用太阳能和风能等可再生能源 (RE) 的潜力,为公民提供清洁、可靠和负担得起的电力。
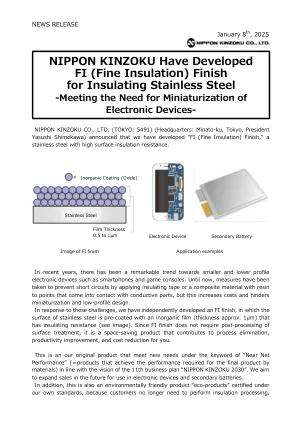
NIPPON KINZOKU 开发出了 FI(精细绝缘)...
我们在第 11 个商业计划中设定了愿景“多材料和混合材料公司,共同创造新的生态和人类友好价值 ~ 通过对各种材料进行轧制和复合成型,我们实现了最终产品所需的性能,并为人类和地球的未来做出贡献 ~”。以“多材料和混合材料”(= 利用各种材料满足各种需求)、“近净形状”(= 实现接近最终产品形状的复杂成型工艺)和“近净性能”为关键概念,我们正在利用我们的原创技术推动面向未来的产品开发,并致力于转变我们的业务结构,重点关注满足新需求的新技术和新产品。

MonDéfiCarbone-伙伴关系提案OCT
Impact Hub是社会创新的催化剂。Impact Hub网络通过全球100多个Impact Hubs在协作生态系统中连接16,000多名企业家,创意和技术人员。在瑞士,Impact Hub有8个地点,并且存在于6个城市:巴塞尔,伯尔尼,日内瓦,洛桑,卢加诺和苏黎世。瑞士的Impact Hub进行了三项全国运动:Vertus Virus,Climathon Suisse 2020和循环经济孵化器。
公开通话:牙买加互动“ Fi Wi Science”壁画
打开通话)。背景文学,表演和烹饪艺术在想到牙买加文化时占主导地位。许多人不知道牙买加拥有丰富的科学遗产。尽管STEM(科学,技术,工程和数学)是牙买加发展不可或缺的一部分,但牙买加STEM学生(或潜在的学生)必须搜索以找到牙买加科学文化的证据,他们可以识别出可以启发他们的牙买加科学文化。没有一个公共场所或实体始终捕获牙买加的科学遗产和文化,包括科学家,机构,突破和创新。没有专门用于牙买加的科学文化和遗产的国家纪念碑……如果我们没有榜样,我们的青年将如何激励和启发研究STEM主题并帮助解决我们的国家和地区的问题?为了促进和普及牙买加的科学遗产,UWI-FST,MONA(生产了许多加勒比海科学家)已经着手:
播客:黄热病疫苗接种 - DIFAEM
黄热病是由一种名为埃及伊蚊的受感染蚊子传播的。它们只能感染猴子和人类。少数感染病毒的患者从未出现任何症状。更常见的是,症状在蚊子叮咬后 3 至 6 天出现。其表现为发烧、肌肉疼痛、头痛、背痛、恶心和呕吐。大多数情况下,症状会在 3 至 4 天后消失。约15%的患者进入疾病的第二阶段,已消失的症状再次出现。患者随后会出现严重症状,主要影响肾脏和肝脏并引起黄疸。黄疸是这种发烧名称的由来:黄热病。口腔、鼻子、眼睛或胃部可能会出现出血。目前仅可支持治疗,无法治愈。大约一半的重症病例在 7 至 10 天内死亡6。
liIIfl 111 ES L-TR-92-40 - ;1 fi i I;11t -'! - DTIC
钢筋防护混凝土结构。空军防护结构设计手册 (PCDM) 中的分析和设计方法提供了用于执行概率响应分析和可靠性评估的名义(确定性)方法。这项工作的主要目标之一是开发简化的基于可靠性的设计方法,以基于可靠性的设计因子 (RBDF) 的形式,可供不熟悉概率方法的设计人员使用。RBDF 考虑了关键的设计不确定性,并与 PCDM 方法结合使用。RBDF 以负载和阻力乘数的形式列出,作为设计可靠性水平的函数。通常,随着对可靠性的要求越来越高,负载乘数(通常小于 1.0 的因子)会降低。使用基于可靠性的设计程序,设计人员可以评估设计中的安全裕度并进行成本-生存能力权衡。
liIIfl 111 ES L-TR-92-40 - ;1 fi i I;11t -'! - DTIC
本研究的目的是开发基于可靠性的钢筋防护混凝土结构设计方法。空军防护结构设计手册 (PCDM) 中的分析和设计方法提供了用于执行概率响应分析和可靠性评估的名义(确定性)方法。这项工作的主要目标之一是开发简化的基于可靠性的设计方法,以基于可靠性的设计因子 (RBDF) 的形式,可供不熟悉概率方法的设计师使用。RBDF 考虑了关键的设计不确定性,并与 PCDM 方法结合使用。RBDF 以负载和阻力乘数的形式列出,作为设计可靠性水平的函数。通常,随着可靠性要求的提高,负载乘数(通常小于 1.0 的因子)会降低。使用可靠性