XiaoMi-AI文件搜索系统
World File Search SystemFloat

浮动计划
浮动计划说明:如果在线计划不起作用,请填写此浮动计划。请至少在船舶运营前两小时提交。将填妥的表格通过电子邮件发送给船舶安全官 Anne Sevon (asevon@fiu.edu)、您的 PI/主管、您的船长紧急联系人、船长 Bill Chamberlain (wchambe@fiu.edu) 和 Rafael Gonzalez-Collazo (gonzalra@fiu.edu)。如果此表格上的问题与您的请求不符,请输入“N/A”。船只代码:注册号:船只大小和品牌:卡车编号:卡车和拖车停放地点:出发地:出发日期:出发时间:返回日期:返回时间:目的地(区域的通用名称):纬度:经度:最可能路径的描述:旅行目的:资金(PantherSoft 资金来源 ID):PI/主管姓名和电子邮件:船长紧急联系人(FIU 附属机构):船长紧急联系人电子邮件:
float计划
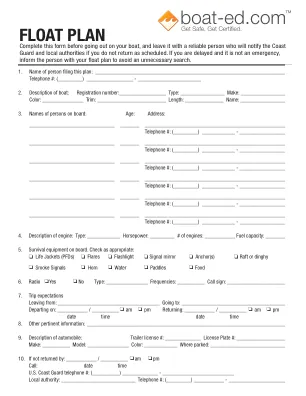
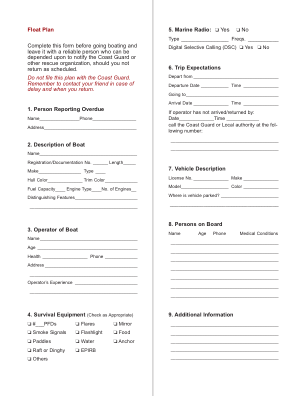
7。旅行期望从:_____________________________________________________________________________________ / ____________________________________________ / ______________ / __________ AM PM PM日期时间时间8. < / div> < / div> < / div> < / div> < / div> < / div> < / div>Other pertinent information: _________________________________________________________________________

划船安全浮动计划
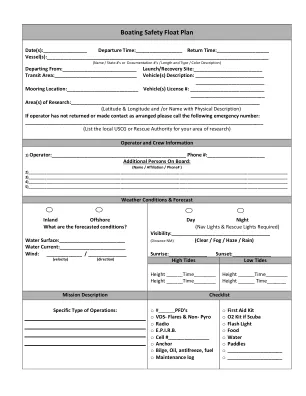
(名称/州号或文件号/长度和类型/颜色描述) 出发地:___________________________ 发射/回收地点:_________________________ 过境地区:______________________________ 车辆描述:_________________________ _________________________ 停泊地点:________________________________________ 车辆执照号:___________________________ ___________________________ 研究领域:_____________________________________________________________________ (经纬度和经度和/或名称及物理描述) 如果操作员未按安排返回或取得联系,请拨打以下紧急电话:_______________________________________________________________________________________

Abraj 宣布有意上市......
不得在美国、加拿大、澳大利亚、南非、日本或任何认为发布、出版或分发为非法的司法管辖区内直接或间接发布、出版或分发。本公告并非招股说明书,也不构成任何司法管辖区内(包括美国、加拿大、澳大利亚、南非或日本)出售或认购证券的要约。本公告或其所载内容均不构成任何司法管辖区内任何要约或承诺的基础或依据。根据潜在发行,任何购买股票的要约都将根据招股说明书(“招股说明书”)进行,任何投资者应仅根据招股说明书中包含的信息做出投资决策,该招股说明书可能会由 Abraj Energy Services SAOG(正在转型)(“Abraj”或“公司”)适时发布,以配合其普通股在马斯喀特证券交易所(“MSX”)交易。任何发布的招股说明书均须经阿曼苏丹国资本市场管理局(“CMA”)批准。
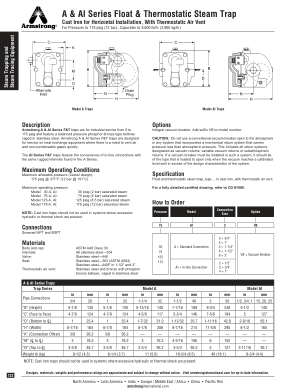
A & AI 系列浮子和恒温蒸汽疏水阀
注意:不要在任何包含机械回流系统(其压力低于大气压)的系统中使用向大气开放的传统真空断路器。这包括所有指定为真空回流、可变真空回流或亚大气压回流的回流系统。如果必须在这样的系统中安装真空断路器,则应为仅在真空达到远超系统设计特性的校准水平时加载以打开的类型。

A & AI 系列浮球式和热静力式蒸汽疏水阀
警告:不要在任何包含机械回流系统(其压力低于大气压)的系统中使用向大气开放的传统真空断路器。这包括所有指定为真空回流、可变真空回流或亚大气压回流的回流系统。如果必须在这样的系统中安装真空断路器,则应为仅在真空达到远超过系统设计特性的校准水平时加载以打开的类型。规格浮子和恒温蒸汽疏水阀,类型...铸铁,带恒温排气口。最大允许背压为入口压力的 99%。如何订购