XiaoMi-AI文件搜索系统
World File Search SystemFoots

了解通信延迟对... 的影响
- Patty Burcham,感谢她协助参与者进行视力筛查,并帮助收听无数音频文件和转录大量数据。 - Ashley Foots 和 Rachel Weatherless,感谢她们协助参与者进行听力筛查。 - Jennifer Swoboda 和 Kathy Kehring,感谢她们帮助收听数小时的音频文件,并不断支持和鼓励我继续前进。 - Kristin Schaeffer 和 Tony Baker,感谢她们在写作过程中的热情支持,并给予我如此出色和有用的反馈。由于您的意见,这份手稿变得更好。我也感谢您坚持不懈地提醒我,完成是触手可及的,即使事情似乎没有任何进展,也要继续前进。

上升
2024年的晚会还包括对Allene and Foots Parnell的特别致敬,他们被公认为2024年董事圈子的荣誉奖,因为他们对O'Neal综合癌症中心的承诺。像麦当劳一样,帕内尔(Parnells)也与癌症有个人联系,他们失去了22岁的女儿卡尔顿(Carleton)与疾病。“ Parnells是顾问委员会中心的重要代表,”麦当劳说。“他们花了很大一部分人的生活,以在癌症相关的原因上有所作为。” UAB O'Neal综合癌症中心被认为是该国领先的癌症研究机构之一,是美国国家癌症研究所(NCI)获得综合癌症中心名称的最初八个设施之一。它仍然是阿拉巴马州唯一这样的中心。O'Neal综合癌症中心主任Barry Sleckman,医学博士,博士学位,他说ArtBlink筹集的资金专用于该中心的O'Neal Invests Grant计划。在他的
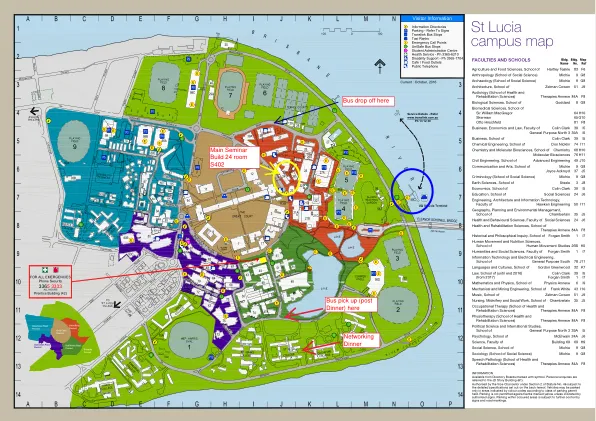
昆士兰大学圣卢西亚校区地图手册
栋栋地图 名称 编号 参考原住民和托雷斯海峡岛民研究单位书店 4 J8 原住民环境研究中心 Zelman Cowen 51 J9 行政服务(中央行政) JD Story 行政管理 61 G9 Brian Wilson 校长办公室 61A G9 高级成像中心,高级成像中心 57 G11 高级材料加工与制造,高级工程中心 49 J10 人文学科高级研究,Forgan Smith 研究所 1 I7 高级水资源管理中心 Gehrmann 实验室 60 G10 进步服务 JD Story 行政管理 61 G9 校友和社区关系 JD Story 行政管理 61 G9 昆士兰大学校友之友校友中心 91C D7 建筑、理论、批评和历史,Zelman Cowen 中心 51 J9 视听 - 教学技术服务 Prentice 42 I9 澳大利亚马遗传学研究中心化学 68 H10 澳大利亚基因组研究中心 Gehrmann 实验室60 G10 澳大利亚生物工程与纳米技术研究所 (AIBN) AIBN 75 H11 澳大利亚商业与经济研究所 通用 北 3 39A I5 银行 澳新银行大厦 41 41 J9 澳大利亚银行大厦 41 41 J9 BOQ ATM Burger Urge 生物科学图书馆 94 G7 BOQ ATM 主食堂 主食堂 21B K8 BOQ ATM Physiol 餐厅 生理学食堂 63 G9 BOQ ATM 红厅 昂山素季会议中心 21C K8 联邦银行联盟 21A J8 联邦银行 ATM JD Story 管理部门 61 G9 国家银行 (NAB) ATM 联盟 21A J8 Suncorp ATM 联盟 21A J8 西太平洋银行 ATM 联盟 21A J8 宝钢-澳大利亚联合研发中心 Hawken 工程 50 I11 巴士 Chancellors Place 巴士站候车亭 77A F9昆士兰大学湖区巴士站候车亭 58A M8 中央玻璃屋服务中心 中央玻璃屋 89E E5 儿童保育设施 校园幼儿园 校园幼儿园 73 H12 玛格丽特·克里布儿童保育中心 玛格丽特·克里布儿童保育中心 93B B6 剧场 家长和儿童保育中心 学生支持服务 21D K7 芒罗中心 芒罗儿童保育中心 93C E9 克莱姆·琼斯老年痴呆症研究中心 昆士兰脑研究所 79 G10 煤层气,詹姆斯·福茨爵士中心 47A I11 交流与社会变革,乔伊斯·阿克罗伊德中心 37 J5 交流障碍中心治疗中心 84A F8 孔子学院 Forgan Smith 1 I7 继续教育和 TESOL 教育,Llew Edwards 爵士学院 14 I6 澳大利亚联邦科学与工业研究组织昆士兰生物科学区 80 E8 昆士兰大学文化遗产部门 Michie 9 G8 数字奖学金,杜希格中心 2 号塔 J7 陶氏可持续工程创新中心 霍肯工程 50 I11 早期认知发展中心 McElwain 24A J6 效率和生产力分析,柯林克拉克中心 39 I5 科学和工程领域的电子学习创新和伙伴关系,