XiaoMi-AI文件搜索系统
World File Search SystemFusion

Optem® FUSION
放大倍数................................................................ 0.16X NA................................................................... 0.005 分辨率.............................................................. 15.0 lp/mm 景深................................................................... 23 mm 视野*.............................................................. 41 x 55 mm 工作距离.............................................................. 490 mm

2012 年第 15 届国际信息融合会议 (FUSION... 会议
走向硬+软数据融合:硬智能数据和软智能数据联合融合与分析的处理架构与实现 Geoff GROSS、Rakesh NAGI、Kedar SAMBHOOS、Daniel SCHLEGEL、Stuart SHAPIRO、Gregory TAUER

聚变大师课程 - 卡勒姆聚变能源中心
• 总计 300 个 CAT(其中 90 个为 L6)英格兰、威尔士、北爱尔兰 o 3000 小时名义学习时间,其中 900 小时为 L6 • 总计 480 个 SCQF(其中 60 个为 L9 – 苏格兰级别)苏格兰 • 定义融合本科课程并不是必需的,因为不直接为此进行合作投资,但是,如果作为合作案例的额外好处的一部分呈现,定义本科课程中融合相关/特定内容的名义学习小时数将很有用。

传感器和数据融合
由 In-Teh 出版 In-Teh 是 I-Tech Education and Publishing KG(位于奥地利维也纳)的克罗地亚分公司。允许摘录和非营利性使用材料,但需注明来源。章节中表达的声明和观点均为个人贡献者的观点,不一定代表编辑或出版商的观点。我们不承担已发表文章中信息的准确性的责任。出版商对因使用其中包含的任何材料、说明、方法或想法而造成的任何人身或财产损害或伤害不承担任何责任。在 In-Teh 出版本作品后,作者有权在其作为作者或编辑的任何出版物中全部或部分重新出版本作品,并将其用于其他个人用途。© 2009 In-teh www.in-teh.org 可从以下地址获取更多副本:publication@ars-journal.com 首次出版于 2009 年 2 月 克罗地亚印刷 p. cm。ISBN 978-3-902613-52-3 1。传感器和数据融合,Dr. ir。Nada Milisavljević
GAO-23-105813,聚变能源
然而,要实现商业化核聚变,必须克服若干挑战,利益相关方对这一时间表的预测从 10 年到几十年不等。一个关键的科学挑战是等离子体的物理学,即核聚变所需的物质状态。研究人员并不完全了解燃烧等离子体的行为,那些主要热源是核聚变反应本身而不是外部来源的等离子体。研究人员在这个领域取得了进展,但缺乏足够的实验数据来验证他们的模拟。一个关键的工程挑战是开发出能够承受核聚变条件数十年的材料,如极热和中子损伤,而目前还没有可以对材料进行全面测试的设施。更一般地说,从核聚变中提取能量以提供经济的电力来源的任务提出了几个复杂的系统工程问题,尚未解决。
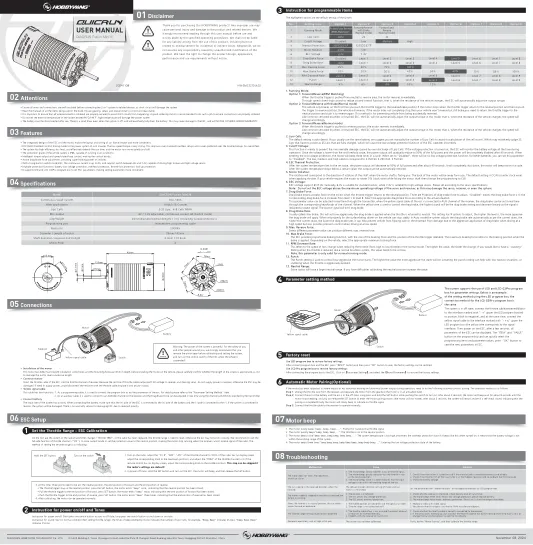
QUICRUN Fusion Mini16
• 电调与电机一体化设计,车架布局布线更加简洁便捷。 • 攀岩车动力系统采用FOC(磁场定向控制)驱动方式,低速扭力强劲,优于标准无刷驱动,整体手感优于有刷驱动。 • 系统效率高,发热量小,有效延长运行时间,电机运转更安静柔和。 • 整机防护等级达到IP66,全工况运行无忧。 • 智能扭矩输出与速度闭环控制,操控得心应手。 • 主动拖拽制动力调节,上坡时提供超强抓地力。 • 内置强效开关模式BEC,持续电流高达4A,支持6V/7.4V切换,可驱动大扭矩高压舵机。 • 多重保护功能:电池低压保护、过热保护、油门丢失保护、锁死保护。 • 支持LED、LCD两种G2/Pro编程盒设置电调参数,设置参数更加便捷。

EEG-fMRI 融合研究
看到社交触摸会触发强烈的社交情感反应,涉及多个大脑网络,包括视觉、社交感知和躯体感觉系统。先前的研究已经确定了每个系统的具体功能作用,但对信息流的速度和方向性知之甚少。这些信息是通过社交感知系统提取的,还是通过躯体感觉皮层的模拟提取的?为了解决这个问题,我们检查了观察到的触摸的时空神经处理。21 名人类参与者(7 名男性)在脑电图 (EEG) 记录期间观看了显示社交和非社交触摸的 500 毫秒视频片段。视觉和社会情感特征在大脑中迅速提取,分别在视频开始后 90 毫秒和 150 毫秒开始。将 EEG 数据与我们之前研究中使用相同刺激的功能性磁共振成像 (fMRI) 数据相结合,发现神经信息首先出现在早期视觉皮层 (EVC) 中,然后出现在颞顶交界处和后颞上沟 (TPJ/pSTS) 中,最后出现在躯体感觉皮层中。EVC 和 TPJ/pSTS 独特地解释了 EEG 神经模式,而躯体感觉皮层本身并不能解释 EEG 模式,这表明社会情感信息可能从 TPJ/pSTS 流向躯体感觉皮层。总之,这些发现表明,社交触觉在前馈视觉过程的时间范围内被快速处理,并且触觉的社会情感意义首先由社交感知通路提取。如此快速地处理社交触觉可能对于其在社交互动过程中的有效使用至关重要。