XiaoMi-AI文件搜索系统
World File Search SystemGNSS

改变游戏规则 - GNSS 内部
Jules McNeff 是美国弗吉尼亚州维也纳 Overlook Systems Technologies, Inc. 的战略与项目副总裁。他曾于 1986 年至 1989 年担任五角大楼空军总部的全球定位系统 (GPS) 项目要素监控员;1989 年至 1996 年担任国防部长办公室 (OSD) 指挥、控制、通信和情报 (C3I) 及采购与技术 (A&T) 的 GPS 联络员;1996 年至 2002 年在行业内为国家安全空间架构师提供支持;2002 年至 2003 年担任 NASA 局长的特别助理;2003 年至今负责支持 OSD 网络和信息集成 (NII)。McNeff 于 1996 年至 2003 年期间担任美国 GPS 工业委员会军事事务主任,并从 1996 年至今担任公共 X-Y 测绘项目主任。他是 Inside GNSS 编辑顾问委员会成员。他毕业于美国空军学院,获得电气工程学士学位,并从哈佛商学院获得工商管理硕士学位。

2020 年 GNSS 用户技术报告
2020 年,尽管被疫情所标记,但就 GNSS 世界而言,仍然在全球系统和新的基础服务层面上发生了重要事件。 GSA 报告首先概述了最新发展和未来趋势。目前,全球四大系统格局已经巩固:GPS、格洛纳斯、伽利略和北斗(图1)。伽利略和北斗系统均已全面投入运行,目前中地球轨道 (MEO) 轨道上共有超过 100 颗 GNSS 卫星,世界各地的每个用户都可以看到大量卫星。但这种情况并不是一成不变的:虽然两个历史悠久的 GNSS,GPS 和 GLONASS,继续进行现代化升级(GPS 发射了第三代 GPS-III 卫星,GLONASS 部署了 GLONASS-K 卫星,也以卫星模式运行),
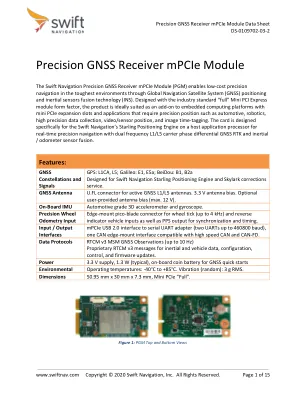
精密 GNSS 接收器 mPCIe 模块
Swift Navigation 精密 GNSS 接收器 mPCIe 模块 (PGM) 通过全球导航卫星系统 (GNSS) 定位和惯性传感器融合技术 (INS),在最恶劣的环境中实现低成本精密导航。该产品采用行业标准的“全”Mini PCI Express 模块外形设计,非常适合作为带有 mini PCIe 扩展槽的嵌入式计算平台的附加组件,以及需要精密定位的应用,例如汽车、机器人、高精度数据收集、视频/传感器位置和图像时间标记。该卡专为主机应用处理器上的 Swift Navigation Starling 定位引擎而设计,用于实时精密导航,具有双频 L1/L5 载波相位差分 GNSS RTK 和惯性/里程表传感器融合。
路线图完全开发GNSS ...
GNSS极化无线电掩星(Pro)在2009年(发表在Cardellach等人,2015年)中,并通过在两个正交线性(水平和垂直或H/V)中接收GNSS信号来扩展标准RO技术,而不是圆形极化。沿信号的轨迹的非球形水透水物的存在会导致水平成分中的延迟比垂直延迟,鉴于沿局部水平方向倾向于以其最大的尺寸定向。这是一个很小的效果,但是它沿着射线轨迹积累到电磁载体波长的一部分。可观察到的称为极化相位移位(𝛥𝜙)可以通过专用的GNSS Pro接收器来测量,并代表集成的特定

标准文件 – RNAV(GNSS)进近
一般斐济国家航空法由三层或三重系统监管体系组成,包括法案、法规和标准文件;其目的是确保在适当情况下遵守和符合国际民航组织的标准和建议措施 (SARPS)。“三层”或“三重系统”监管体系代表斐济的主要立法体系和具体操作规章,以满足国际民航组织安全监督系统八个关键要素中的关键要素 CE1 和 CE2 标准文件 (SD) 由斐济民航局根据 1979 年民航局法 (CAP 174A) 第 14 (3) (b) 条的规定发布 在适当情况下,SD 还包含有关当局可接受的标准、做法和程序的技术指导(关键要素 CE5)。尽管有上述规定,并且如果本标准文件中明确指出有此类规定,则可以考虑向管理局提交其他合规方法,前提是这些方法具有补偿因素,可以证明其安全水平相当于或优于本文规定的安全水平。因此,管理局将根据每个申请人的实际情况和替代方法的相关性,全面考虑每个案例。当确定新标准、做法或程序可以接受时,它们将被添加到本文件中。目的 本标准文件 RNAV GNSS APPROACHES 由斐济民航局根据《1981 年航空航行条例》(经修订)第 118 条 – (1) 款发布。本文件适用于打算执行 RNAV(GNSS)进近的运营商和飞行员。本文件是根据运营商遵守管理局通知的标准的义务而制定的,也是发出此类通知的方式。变更通知 本标准文件是根据管理局监督认证运营商及其人员的义务而制定的,也是运营商遵守管理局通知的标准的义务而制定的,也是发出此类通知的方式。本文件为原始版本,自 2007 年 5 月 14 日起生效。

国际全球导航卫星系统委员会最新发展
为了与多 GNSS 接收机制造商开展对话,需要对多 GNSS 接收机的时间偏移精度要求进行调查。然而,由于物流和时间表复杂以及成本高昂,很难让全球许多制造商参加授时互操作性研讨会。因此,建议 GNSS 提供商在国内大规模开展调查,并根据调查结果向 ICG 提交报告,以推动 GNSS 时间互操作性的改进。

GNSS 中断对英国的经济影响
应急服务在其运营的多个阶段都使用 GNSS。定位紧急电话、跟踪地面资源并指挥响应者,这些都以 GNSS 作为关键输入。GNSS 服务中断意味着这些应急服务(包括警察、救护车、消防队和海岸警卫队)将无法正确处理需求,紧急相关呼叫将更长,拥堵将严重,服务车队的导航系统将无法运行。这种效率损失的成本在于需要额外的人员来弥补赤字,以及响应时间的增加。应急服务的内部通信方法也由 GNSS 时间同步功能支持。最后,安全和监控机器人市场正在不断增长,它们高度依赖精确的位置信息。
改变游戏规则 - GNSS 内部
Jules McNeff 是美国弗吉尼亚州维也纳 Overlook Systems Technologies, Inc. 的战略与项目副总裁。他曾于 1986 年至 1989 年担任五角大楼空军总部的全球定位系统 (GPS) 项目要素监控员;1989 年至 1996 年担任国防部长办公室 (OSD) 指挥、控制、通信和情报 (C3I) 及采购与技术 (A&T) 的 GPS 联络员;1996 年至 2002 年在行业内为国家安全空间架构师提供支持;2002 年至 2003 年担任 NASA 局长的特别助理;2003 年至今负责支持 OSD 网络和信息集成 (NII)。McNeff 于 1996 年至 2003 年期间担任美国 GPS 工业委员会军事事务主任,并从 1996 年至今担任公共 X-Y 测绘项目主任。他是 Inside GNSS 编辑顾问委员会成员。他毕业于美国空军学院,获得电气工程学士学位,并从哈佛商学院获得工商管理硕士学位。

融合低地球轨道 GNSS - 无线电导航实验室
摘要 — 传统全球导航卫星系统 (GNSS) 的抗干扰能力可能正在接近实际性能上限。在传统 GNSS 轨道和频谱之外有可能获得更大的增益。低地球轨道 (LEO) 的 GNSS 长期以来被视为有前途但成本高昂,需要大型星座来实现快速导航解决方案。最近出现的商用宽带 LEO 巨型星座引发了人们对这些星座双重用途的研究,既可用于通信(其主要任务),又可用于次要的定位、导航和授时 (PNT) 服务。这些星座的运行波长比传统 GNSS 更短,可实现高度定向、相对紧凑的接收天线。不需要特定于 PNT 的在轨资源:托管宽带网络的发射器、天线、时钟和频谱足以满足 PNT 的需求。非合作使用 LEO 信号进行 PNT 是一种选择,但与星座运营商的合作(与其通信任务“融合”)减轻了从地面跟踪密集低空星座的负担,并使接收器能够产生单历元独立 PNT 解决方案。本文提出了这样一种合作概念,称为融合 LEO GNSS。可行性取决于机会成本,或次要 PNT 任务对通信星座运营商造成的负担。这是根据时间-空间-带宽乘积和能量预算来评估的。结果表明,近距离