XiaoMi-AI文件搜索系统
World File Search SystemGNSS
导航战:GNSS 拒绝 - 威胁与缓解
导航战 (NAVWAR) 威胁 蓄意、故意干扰的发生频率越来越高,现在应该被视为破坏和欺骗行动的常规方面。与电子战 (EW) 的其他方面一样,对 PNT 能力的攻击通常在任何“动能”战斗之前进行。有效干扰的例子包括最近在韩国和乌克兰发生的事件。2010 年 8 月至 2013 年 5 月期间,韩国经历了据称来自朝鲜的反复 GPS 干扰,当时许多船只和飞机报告接收到的 GPS 信号中断。最近,欧洲安全与合作组织 (OSCE) 报告了针对其在乌克兰的特别监测团 (SMM) 的无人机 (UAV) 的“军用级”GPS 干扰。

美国对 GPS/GNSS 设备的出口管制
(i) 专门为军事应用而设计的 GNSS 接收设备(如果设计或修改为机载应用,并能够在速度超过 600 米/秒时提供导航信息,则为 MT); (ii) 专门为 GPS 精确定位服务 (PPS) 信号的加密或解密(例如 Y 码、M 码)而设计的全球定位系统 (GPS) 接收设备(如果设计或修改为机载应用,则为 MT);

通过...
摘要 - 我们考虑在太空中检测GNSS接收器的SPOOFIF攻击的问题,绕地球绕着地球绕。由于空间中的接收器无法利用所谓的机会信号的存在,因此必须依靠检测信号本身中的异常并检查其测量值与计算的轨道位置的一致性。我们考虑三个不同的一致性检查:在前端的总收到的GNSS信号功率上;从每个卫星发出的信号的估计载体与噪声比(C/N 0)上;在最终计算的位置在接收器输出处。此外,我们设计了一种融合方法,该方法结合了三个检查中的软输出,以提供更可靠,更强大的检测。在现实的模拟环境中测试了所提出的技术,表明尽管位置一致性检查是迄今为止最可靠的,但来自所有这三个的软信息的正确融合允许在不同条件下进一步提高检测率。

用于空间天气的低成本 GNSS 接收系统
% =================================================== % TEC 数据处理软件 % 顾问:Prof.Dr. Pornchai Supnithi % CSSRG 实验室,% 电信工程学院 % 工程学院 % 拉卡邦先皇理工学院 % 泰国曼谷 % ======================================================= % 输出数据:每天 % TEC.vertical = 垂直总电子含量 (VTEC) % TEC.slant = 倾斜总电子含量 (STEC) % TEC.withrcvbias = 带接收器 DCB 的 STEC % TEC.withbias = 带卫星和接收器 DCB 的 STEC % TEC.STECp = 根据代码范围计算的 STEC % TEC.STECl = 根据载波相位计算的 STEC % DCB.sat = 卫星 DCB % DCB.rcv = 接收器 DCB % prm.elevation = 仰角 % ROTI = 速率更改 TEC 指数

GNSS服务支持英国的民航
概念,ICAO正在修改SARP,以通过开发双频,多星座(DFMC)体系结构来提供更大的弹性。明显的英国国内覆盖范围申请是使用GPS和GALILIEO,其频率为L1/E1或L5/E5A,提供ABA,SBA和GBAS服务,包括ABAS Evolutions作为Araim Integrity Support Messails。从英国的角度来看,很难看到独立的英国空间行业将如何实现此类概念。●2023年10月18日,基于空间的技术概念已经暗示了英国SBAS的挑战:wription the Pratform Platform的相对简单性和

为期 2 周的 GNSS/NavIC 应用高级 FDP ...
Ivan G Petrovski 博士,iP Solutions,日本 Ivan G. Petrovski 博士在 GNSS 领域工作了 35 年多。他在学术领域和行业都拥有丰富的经验和专业知识。他的学术经历包括担任莫斯科航空学院 - 技术大学副教授、日本东京海洋科学技术大学客座教授以及美国 Embry Riddle 航空学院客座讲师。他曾担任日本国家航空实验室 (现为 JAXA) 的日本科学技术振兴机构研究员,并领导 DX Antenna Inc. 和 GNSS Technologies Inc. 的 GNSS 研发。他是多篇论文 (ION 最佳论文奖)、GPS World 和 Inside GNSS 杂志文章以及多项专利的作者。他是 GPS World 杂志顾问委员会成员。他是剑桥大学出版社出版的两本书的作者。目前,他领导 iP-Solutions Inc. 的 GNSS 产品开发,造福学术界和研究界。

GNSS 软件定义无线电 飞向月球及更远的未来
软件定义无线电 (SDR) 技术在导航领域的应用使几乎每个工程师或研究人员都能对新发明的算法进行原型设计,并用真实的导航信号对其进行测试。这包括用于学习 GNSS 信号基本采集和跟踪的教程,以及构建复杂的接收器,例如,使用惯性辅助的多天线接收器或使用盲方法的机会信号接收器。如果没有 SDR,这种广泛的信号处理研究根本无法进行,因为只有极少数大型公司有能力设计和制造硬件接收器。在 20 世纪 80 年代和 90 年代对 SDR 用于发送和接收通信信号进行概念化和测试之后,SDR 在 GNSS 接收器中的应用始于 90 年代中期,首先在数字信号处理器上实施选定的算法。俄亥俄大学和吕勒奥理工大学的研究人员进行了一项关键实验,以在 1999 年实现能够实时处理信号的完整 GPS 接收器。这项工作涉及设计
改进 GNSS 并实现太空用户的互操作性
组织 • 根据总统授权成立并按照联邦咨询委员会法案 (FACA) 规定运作 • 为 PNT EXCOM 提供独立的技术和政策咨询 • 成员由 PNT EXCOM 部门/机构提名、PNT EXCOM 联合主席批准并由 NASA 管理员任命 • 章程允许建立特设工作组和小组委员会 近期活动 • 2021-2023 年章程于 2021 年 4 月 30 日签署。它将成员上限从 25 人扩大到 30 人,以支持根据 SPD-7 扩大 PNT EXCOM 代表权 • 2021 年 12 月 7 日,NASA 局长 Bill Nelson 签署了 9 名新成员的任命 • 第 25 届会议于 2021 年 12 月 9 日至 10 日在弗吉尼亚州阿灵顿举行 • 第 26 届会议计划于 2022 年 5 月在马里兰州安纳波利斯举行
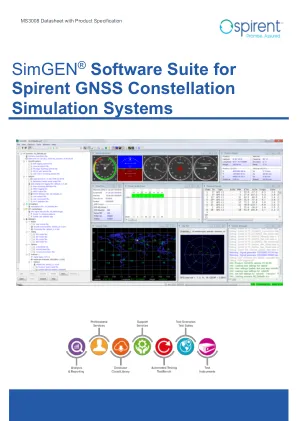
适用于 Spirent GNSS Constellation 的 SimGEN® 软件套件...
图 1 基于 SimGEN 的 GSS9000 GNSS 仿真系统示例 .............................................................................. 8 图 2 GSS7000 GNSS 仿真系统示例 .............................................................................................. 8 图 3 SimGEN 图形用户界面示例 ...................................................................................................... 9 图 4 场景树 ...................................................................................................................................... 10 图 5 车辆(天线)位置、运动和接收信号显示 ............................................................................. 11 图 6 卫星地面轨迹和天空图 ............................................................................................................. 11 图 7 典型的源编辑器 ................................................................................................................ 12 图 8 典型的星座编辑器 – 显示 GPS ............................................................................................. 13 图 9 卫星地面轨迹 ............................................................................................................................. 14 图 10 信号内容定义 – 显示 GPS ............................................................................................. 15 图 11 大气模型系数 ................................................................................................................ 16 图 12 定义车辆性能范围的个性编辑器 ................................................................................. 18 图13 赛道编辑器 ................................................................................................................................ 19 图 14 圆周运动编辑器 ...................................................................................................................... 20 图 15 飞机运动命令编辑器 ................................................................................................................ 21 图 16 航天器位置编辑器 ................................................................................................................ 24 图 17 地形遮挡编辑器 ...................................................................................................................... 26 图 18 天线模式编辑器 ...................................................................................................................... 27 图 19 天线杠杆臂 ............................................................................................................................. 27 图 20 Sim3D™ 环境表示 ................................................................................................................ 28 图 21 统计多径类别掩模编辑器 ............................................................................................................. 29 图 22 GTx 的功率与距离建模 ..................................................................................................... 31 图 23 快速查看选择和记录 ............................................................................................................. 32 图 24 数据流 ............................................................................................................................. 33 图 25 信号类型选择 ............................................................................................................................. 34 图 26 GBAS 消息类型 1 和 2 编辑器示例 ...................................................................................... 38

国际民航组织 GNSS 射频干扰缓解计划 - 联合国外空事务办公室
建议 6/8 — 规划缓解全球导航卫星系统的脆弱性 各国:a) 评估其空域内全球导航卫星系统脆弱性的可能性和影响,并在必要时采用公认和可用的缓解方法;b) 对全球导航卫星系统(GNSS)频率进行有效的频谱管理和保护,以减少无意干扰或降低 GNSS 性能的可能性;c) 向国际民航组织报告可能对国际民用航空运行产生影响的全球导航卫星系统有害干扰案件;d) 建立并执行强有力的监管框架,管理全球导航卫星系统中继器、伪卫星、欺骗器和干扰器的使用;e) 允许充分利用机载缓解技术,特别是惯性导航系统; f) 当确定需要地面辅助设备作为缓解策略的一部分时,优先保留测距设备(DME)以支持惯性导航系统(INS)/DME 或 DME/DME 区域导航,以及在选定跑道上保留仪表着陆系统。3