XiaoMi-AI文件搜索系统
World File Search SystemGPS

GPS定位导航
2.1 GPS 的三个部分................................................................................................................4 2.2 GPS 卫星星座....................................................................................................................4 2.3 GPS 设备....................................................................................................................5 2.4 载波................................................................................................................................6 2.5 调制在每个载波上的信息.......................................................................................7 2.6 C/A 和 P 码....................................................................................................................8 2.7 单点定位....................................................................................................................11 2.8 相对定位....................................................................................................................12 2.9 静态和动态定位....................................................................................................13 2.10 实时和任务后处理.....................................................................................................14 2.11 仰角和遮蔽角.....................................................................................................15 2.12 方位角.....................................................................................................................15 2.13 卫星可用性图.....................................................................................................16 2.14 天空图................................................................................................................................17 2.15 较差和较好的 GDOP ..............................................................................................................18 2.16 PDOP 图..............................................................................................................................19 2.17 常见错误.............................................................................................................................21 3.1 准确度和精密度.......................................................................................................................25 3.2 正态概率分布函数....................................................................................................25 3.3 GPS 相对准确度....................................................................................................................29 3.4 大地水准面和椭球体....................................................................................................................31 3.5 正高和椭球体高程之间的关系....................................................................................31 3.6 常规地面系统....................................................................................................................34 3.7 大地坐标系......................................................................................................................................35 5.1 GPS 项目阶段.................................................................................................................49 5.2 为达到所需水平精度建议采用的 GPS 技术.....................................................................50 5.3 代表性接收机成本,1992 年 1 月......................................................................................52 5.4 接收机选择要考虑的方面....................................................................................53 5.5 验证概念....................................................................................................................55 5.6 径向网络配置....................................................................................................................59

gps 情况说明书 - 国防部
在美国参与沙漠盾牌行动和沙漠风暴行动期间,GPS 能力受到了考验。盟军严重依赖 GPS 穿越毫无特色的阿拉伯沙漠。在持久自由行动、高贵之鹰行动和伊拉克自由行动期间,GPS 的贡献显著增加。在伊拉克自由行动期间,GPS 卫星星座允许精确地投放 5,500 枚 GPS 制导联合直接攻击弹药,从而减少附带损害。这几乎占联军对伊拉克目标发射的炸弹和导弹总数的四分之一。GPS 继续在空中、地面和海上行动中发挥关键作用,引导无数军人和设备确保他们准时到达目标。
WAAS 性能标准 - GPS
美国全球定位系统 (GPS) 标准定位服务 (SPS) 由绕地球运行的航天器产生的空间定位、导航和授时 (PNT) 信号组成,这些信号免费提供给全球民用、商业和科学用途。广域增强系统 (WAAS) 为 GPS 提供增强信号,免费提供给用户,该信号提供校正和完整性信息,旨在改善美国 (U.S.) 和加拿大和墨西哥部分地区的定位导航和授时 (PNT) 服务。WAAS 是符合国际民用航空组织 (ICAO) 标准的天基增强系统 (SBAS) 的首次运营实施。此 WAAS 性能标准 (WAAS PS) 指定了使用 GPS SPS 广播信号和 WAAS 增强信号的适当装备用户可用的导航性能级别。美国政府致力于满足本 WAAS PS 中规定的最低服务水平。有关 USG 对 GPS SPS 承诺的具体信息,请参阅 GPS SPS PS。自 WAAS 于 2003 年投入使用以来,实际性能通常达到并超过了本 WAAS PS 中规定的最低准确性、完整性、连续性和可用性性能要求,因此用户通常可以期望性能高于此处描述的最低水平。美国联邦航空管理局 (FAA) 在线提供实际实时性能、统计性能和实时数据。GPS 和 WAAS 的季度性能分析报告也可在 FAA 技术中心 WAAS 测试平台网站 ( http://www.nstb.tc.faa.gov/ ) 上找到。有兴趣的读者可以参考此网站和其他来源,了解最新的 GPS 和 WAAS 性能信息。请注意,基于 WAAS 的垂直定位器性能 (LPV) 引导程序的数量现已超过美国的仪表着陆系统 (ILS) 程序的数量。GPS 未来将提供三种新的现代化民用信号:L2C、L5 和 L1C。借助 L5 上的附加信号,机载接收器将能够校正视线电离层传播延迟误差。这种双频 (L1/L5) 操作模式将允许对基于 GPS 的增强服务(例如 WAAS)的交付进行更改,但本性能标准不考虑这些未来的变化。此 WAAS 性能标准仅适用于 L1 (1575.42 MHz) 粗/捕获 (C/A) 信号和地球静止卫星 (GEO) 广播的 WAAS 空间信号 (SIS) 的 WAAS 增强型 GPS SPS 用户。WAAS PS 将根据需要进行更新,以反映 WAAS 增强服务的重大变化。除了 WAAS PS,读者还可以参考 GPS SPS PS 和 FAA 技术标准命令 (TSO)-145/146,以了解基本 GPS SPS 服务和 WAAS 接收器设备的详细信息。WAAS 还符合或超过了 ICAO 附件 10,全球导航卫星系统 (GNSS) 卫星增强系统 (SBAS) 的标准和建议做法 (SARP)。

PNP3000 GPS 跟踪设备
» OBD-II 接口 » » 内置加速度计 » » 卓越的 GPS 和蜂窝质量 » 内置 GSM 和 GPS 天线 » » 开放服务计划 - 无需合约 » 30 天退款保证
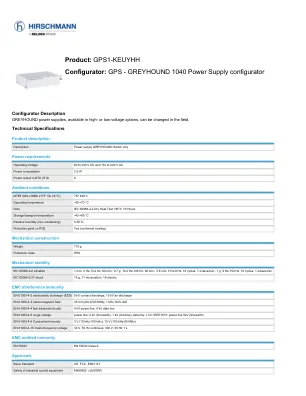
产品:GPS1-KeuyHH配置器:GPS
Belden认为该产品符合数据表中列出的所有适用环境计划。所提供的信息是正确的,从贝尔登出版之日起的最佳知识,信息和信念是正确的。此信息仅设计为安全处理,存储以及产品本身或其成为其成员的任何其他操作的一般指南。产品披露不应被视为保修或质量规范。监管信息仅用于指导目的。产品用户负责根据其对产品的个人使用来确定立法和法规的适用性。

Sentinel® M-Code GPS 接收器
通用动力公司的 Sentinel M-Code GPS 接收器可为低地球轨道 (LEO) 和地球静止轨道 (GEO) 应用提供精确定位服务位置、速度和时间信息。还提供 MEO 和 HEO 轨道。通过使用双天线,性能和卫星可见性得到增强;32 个 GPS 通道中的每一个都可以分配给任一天线(64 个通道为可选)。
铱星拯救了我们?GPS 的替代品
估计此信息收集的公共报告负担平均为每份回应 1 小时,包括审查说明、搜索现有数据源、收集和维护所需数据以及完成和审查此信息收集的时间。请将关于此负担估计或此信息收集的任何其他方面的评论(包括减少此负担的建议)发送至国防部华盛顿总部服务处信息行动和报告理事会 (0704-0188),地址:1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302。受访者应注意,尽管法律有任何其他规定,但如果信息未显示当前有效的 OMB 控制编号,则任何人均不会因未遵守信息收集而受到任何处罚。请不要将您的表格寄回上述地址。1. 报告日期 (DD-MM-YYYY) 24-05-2012
NEO-6 u-blox 6 GPS 模块
汽车惯性导航 (ADR) 是 u-blox 为一级汽车客户提供的业界公认的现成惯性导航解决方案。u-blox 的 ADR 解决方案使用紧密耦合的卡尔曼滤波器将 GPS 和传感器数字数据结合在一起。这可以在没有 GPS 信号或 GPS 信号减弱期间提高定位精度。NEO-6V 通过其软件传感器接口提供 ADR 功能。支持各种传感器(例如车轮转速计和陀螺仪),传感器数据通过来自应用处理器的 UBX 消息接收。这允许轻松集成和简单的硬件接口,从而降低成本。通过使用车辆总线上可用的数字传感器数据,硬件成本被最小化,因为惯性导航功能不需要额外的传感器。ADR 专为简单集成和轻松配置不同传感器选项(例如带或不带陀螺仪的)和车辆变体而设计,并且完全可自我校准。

GPS/INS 系统与 HRSC 的应用
关键词:集成 GPS/INS 系统、系统比较、HRSC-A 多立体相机 摘要 自 1997 年以来,德国航空航天中心 (DLR) 一直将机载 HRSC (HRSC-A/AX) 与直接地理参考方法结合使用。使用 GPS/INS 系统,可以实现许多科学和商业应用,这些应用可实现标准产品的分米级精度,例如真正射影像马赛克和数字表面模型。使用数字线扫描仪技术进行连续和高分辨率数据采集可能是评估来自 GPS/INS 系统的定向数据质量的最佳工具。HRSC 的多立体功能为精确的 3D 建模和外部定向数据可靠性调查提供了额外的手段。2002 年 3 月,德国航空航天中心空间传感器技术与行星探索研究所与 BSF L UFTBILD GmbH 和 IGI mbH 合作,使用两个 GPS/INS 系统 A PPLANIX POS/AV-510 和 IGI AEROcontrol-IId 同时对 HRSC-A 进行了试飞。本文介绍了基于 HRSC-A 数据摄影测量处理的两个 GPS/INS 系统外部方向质量的调查结果。1.简介 自 1997 年以来,德国航空航天中心 (DLR) 行星研究所一直在运行数字高分辨率立体相机 - 机载 (HRSC-A) [4,5,6,7]。多线扫描仪数据的摄影测量处理需要记录精确且连续的位置和姿态数据。这种数字线扫描仪非常稳定且众所周知的内部方向,结合其高几何分辨率和扫描频率为 450 Hz 的永久图像数据采集,为研究 GPS/INS 系统的质量提供了可能性。尽管之前进行了测试 [1],但可以使用适合此任务的理想传感器在相同条件下对 A PPLANIX UND IGI 的 GPS/INS 系统进行首次真正的比较。2.测试配置

全科医生疫苗过敏常见问题解答
轻微疼痛和压痛是疫苗的常见副作用。一些患者还会在 48 小时内在接种疫苗的部位出现局部红肿。接种 Moderna 疫苗的一小部分患者在接种疫苗后 4-11 天内出现延迟性肿胀和发红,并持续一周以上(Blumenthal 等人,N Engl J Med 2021;384:1273-1277)。治疗是对症治疗:抗组胺药可止痒,扑热息痛可止痛,冰袋可缓解不适。患者仍可获得