XiaoMi-AI文件搜索系统
World File Search SystemGSTAR

GSTAR 宣传册 - 洛克希德马丁
GPS 接收器集成和向后兼容性 GPS 接收器在任何 AJ 解决方案的有效性中都起着至关重要的作用。GSTAR 提供多种集成选项:• 与任何标准 GPS 接收器兼容的 RF 接口 • 与外部数字接收器的数字多波束接口;此选项用于基于 EGI 的平台 专为增长而设计 • 基于 M 代码和 SAASM 的 EGI 兼容 AEU • 用于波束成形的开放数字接口 • 基于 FPGA 的架构可适应未来威胁 • 与主要政府和行业合作伙伴一起推进 AJ-GPS 经过验证的设计 GSTAR 系列产品的变体已成功针对各种威胁场景进行了测试。我们已经在众多模拟领域证明了我们的设计能够抵御威胁,包括赖特帕特森空军基地、天线波前模拟器和霍洛曼空军基地的飞行测试。
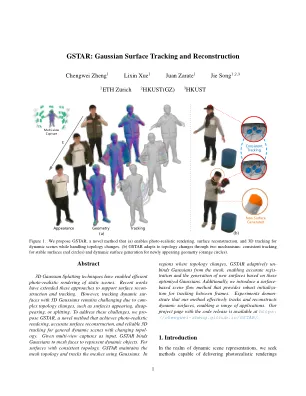
gstar:高斯表面跟踪和重建
从任意观点以及适应不断变化的拓扑结构的表面重构。涉及人类或机器人相互作用与物体的场景需要动态适应分裂,合并或变形的表面。热热,下游应用,例如视觉效果和无标记运动捕获,从不依赖模板的情况下跟踪持久区域的能力显着。因此,方法必须有效地处理这些拓扑更改,以确保高质量的渲染和准确的重建,同时还要维护对现有表面的同意跟踪。经典方法主要依赖于网格和tex曲线图,这些图提供了合理的外观,但重大取决于网格分辨率。他们常常无法准确地确定细节和观察依赖性效果。al-尽管这些网格表示可以进行一定程度的跟踪,但它们努力处理重大的拓扑变化,需要新的关键帧以适应ma-jor变换。神经辐射场的出现(NERF)[28]在静态[1,46]和dy-namic场景[17,30]的外观和新型综合方面有了显着改善。使用Marting Cubes [37,44]可以从隐式签名的距离功能(SDF)得出表面,但除非使用了不足的模板,否则它们缺乏一致的跟踪。最近,出现了3D高斯脱落(3DGS)[20],具有明确的纹理代表,在外观上与NERF竞争,同时实现了更有效的效果。这些高斯人与网格面一起移动,以表示移动和变形的对象。其明确表示有助于跟踪,并为此开发了几种技术[26,50]。然而,准确的动态表面重建仍然是一个挑战,并且在现有表面的跟踪与引入新的表面保持平衡被证明很困难。为了应对这些挑战,我们提出了GSTAR,该方法能够重建光真逼真的外观和准确的表面几何形状,并随着拓扑变化而保持一致的跟踪。GSTAR利用多视图盖,并将网眼与绑定的高斯人结合在一起,与高斯表面相结合。当新的表面变得可见时,新的高斯人会产生,并且网格拓扑更新。适应性网格提供了时间一致,准确的几何形状,而高斯人则带来了逼真的外观。这个问题很困难,因为总会有一个折扣。可以通过固定的托架或模板[24,50]更轻松地跟踪的方法倾向于在新的姿势或变形下降低外观和几何形状的质量。相反,过度拟合静态场景的方法[8,14,16]缺乏时间一致性或错过新的框架详细信息。GSTAR通过尽可能多地跟踪面孔来解决这一权衡

为气候数据预测的Gstarima开发(1,1,1)模型订单
时空模型结合了空间和时间元素。一个示例是广义时空自回旋(GSTAR)模型,该模型改善了时空自回旋(Star)模型。GSTAR模型假定每个位置具有异质性特征,并且数据是静止的。在这项研究中,移动平均成分是通过在特定时间与可变值之间的关系计算得出的,并且假定数据不是固定的,因此使用的模型是广义时空自动式积分的移动平均值(GSTARIMA)模型。通过时空自相关功能(STACF)和时空部分自相关功能(STPACF)确定Gstarima的模型顺序,以确保准确的预测。先前的研究仅讨论了Gstarima(1,1,1)模型,因此在这项研究中,Gstarima(3,1,1)模型将作为Gstarima(1,1,1)模型的开发形式来解决,并应用于气候数据。本研究中使用的气候数据来自NASA功率和具有较大数据大小的降雨量变量,需要使用数据分析生命周期方法来分析大数据。生命周期包括六个阶段:发现,数据准备,模型计划,模型构建,交流结果和操作。基于Python软件的数据过程结果,Gstarima(3,1,1)模型的MAPE值为9%,用于样本数据,样本中数据为11%。相比之下,Gstarima(1,1,1)模型的MAPE值为11%,样本数据中的数据为12%。因此,Gstarima(3,1,1)模型提供了更准确的预测结果。因此,选择正确的模型顺序对于准确的预测至关重要。