XiaoMi-AI文件搜索系统
World File Search SystemGTX

VW ID.4 GTX 220 kW 2022 299hp
加热的窗户加热窗户窗户热块窗户:前噪声降低窗户噪音降低窗户:前部特殊功能:自动机aktivering avstrålkastare,dynamiska blinka blinker blinkers自动大灯激活动态转向信号指南灯:门把手
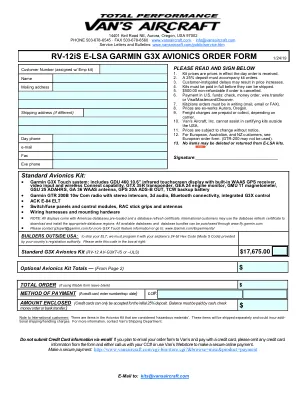
RV-12iS E-LSA GARMIN G3X 航空电子设备订单表
标准航空电子套件:• Garmin G3X Touch 系统:包括 GDU 460 10.6 英寸红外触摸屏显示器,内置 WAAS GPS 接收器、视频输入和无线 Connext 功能、GTX 35R 转发器、GEA 24 发动机监视器、GMU 11 磁力计、GSU 25 ADAHRS、GA 36 WAAS 天线、GPS 20A ADS-B OUT、TCW 备用电池
高效学习操作系统基础知识
• 与 CPU 配合显示图像和视频。 • 拥有独立的显卡可以减轻 CPU 的处理负担,从而提高性能和视觉效果 哪种显卡? 专用卡比集成卡好,但只有当您想玩游戏、视频编辑或 3D 建模时才需要它。 NVIDIA GeForce GTX 或 AMD Radeon RX 系列很受欢迎。
安装手册 - Garmin
订购信息 要获得此出版物的更多副本,请订购部件号 140-0059-000 修订版 J 或更高版本的 MX20 产品 CD,其中包括 560-1025-09 修订版 E、MX20 多功能显示器安装手册。其他出版物 MX20 飞行员指南*,P/N 560-1026-() MX20 快速参考指南*,P/N 561-0263-() MX20 直升机安装补充*,P/N 560-1054-() GX50/60 安装手册,P/N 560-0959-() WX-500 安装手册,Goodrich P/N 009-11500-001 SKY899 安装手册,Goodrich P/N 009-11900-001 ART2000 安装手册,Allied Signal P/N 006-00643-0004 9900B 安装手册,Ryan TCAD P/N 32-2301 9900BX 安装手册,Ryan TCAD P/N 32-2351 WSI InFlight AV-200 安装手册,WSI P/N 305427-00 GTX 330、GTX 330D 应答器手册,Garmin P/N 190-00207-02 GDL 90 安装手册,Garmin AT P/N 560-1049-() GDL 69/69A 安装手册,Garmin P/N 190-00355-02 *这些文档以及其他与 MX20 安装、STC 认证和持续适航/维护相关的文档均以电子形式包含在 MX20 产品 CD 中,部件编号为 140-0059-()。

piper.com | 772.299.2403 - Cutter Aviation
航空电子设备选项 215:110 伏交流电源插座 – 6,000 美元 235:Jeppesen ChartView – 4,110 美元(Jeppesen PilotPak 一年订阅费) 256:GSR 56 铱星收发器 – 16,700 美元 269:GDL 69A XM WX 卫星无线电气象 – 10,970 美元(包括 GRC 10 遥控器) 330:WX-500 Stormscope – 11,350 美元 352:ADF Becker 3500 – 14,700 美元(待批准) 450:TAWS-B – 12,500 美元 563:DME BendixKing KN 63 – 10,600 美元 631:GTX 33ES 第二数字转发器 – 10,455 美元641:分集数字转发器 - 带双天线的 GTX33D ES(欧洲飞机必备 - 可换成 STD GTX33ES)- 14,500 美元 825:GTS 825 交通咨询系统 - 34,300 美元(具有 ADS-B 功能)

轻量级显着对象检测的比例自适应网络
显着对象检测(SOD)广泛用于运输中,例如道路损坏检测,辅助驾驶等。但是,由于其大量计算和参数,重量级草皮方法很难在计算能力低的情况下应用。大多数轻型SOD方法的检测准确性很难满足应用程序要求。我们提出了一个新颖的轻质尺度自适应网络,以实现轻质限制和检测性能之间的权衡。我们首先提出了比例自适应特征提取(安全)模块,该模块主要由两个部分组成:多尺度特征交互,可以提取不同尺度的特征并增强网络的表示能力;和动态选择,可以根据输入图像根据其贡献自适应地分配不同的权重。然后,基于安全模块,设计了一个轻巧和自适应的骨干网络,并结合了多尺度特征聚合(MFA)模块,将规模自适应网络与比例自适应网络相结合。我们在六个公共数据集上对模型进行定量和定性评估,并将其与典型的重量级和轻量级方法进行比较。只有2.29 M参数,它可以在GTX 3090 GPU上实现62 fps的预测速度,远远超过其他型号,并且可以保证实时性能。模型性能达到了一般重量级方法的性能,并超过了最先进的轻量级方法。
适用于 Spirent GNSS Constellation 的 SimGEN® 软件套件...
图 1 基于 SimGEN 的 GSS9000 GNSS 仿真系统示例 .............................................................................. 8 图 2 GSS7000 GNSS 仿真系统示例 .............................................................................................. 8 图 3 SimGEN 图形用户界面示例 ...................................................................................................... 9 图 4 场景树 ...................................................................................................................................... 10 图 5 车辆(天线)位置、运动和接收信号显示 ............................................................................. 11 图 6 卫星地面轨迹和天空图 ............................................................................................................. 11 图 7 典型的源编辑器 ................................................................................................................ 12 图 8 典型的星座编辑器 – 显示 GPS ............................................................................................. 13 图 9 卫星地面轨迹 ............................................................................................................................. 14 图 10 信号内容定义 – 显示 GPS ............................................................................................. 15 图 11 大气模型系数 ................................................................................................................ 16 图 12 定义车辆性能范围的个性编辑器 ................................................................................. 18 图13 赛道编辑器 ................................................................................................................................ 19 图 14 圆周运动编辑器 ...................................................................................................................... 20 图 15 飞机运动命令编辑器 ................................................................................................................ 21 图 16 航天器位置编辑器 ................................................................................................................ 24 图 17 地形遮挡编辑器 ...................................................................................................................... 26 图 18 天线模式编辑器 ...................................................................................................................... 27 图 19 天线杠杆臂 ............................................................................................................................. 27 图 20 Sim3D™ 环境表示 ................................................................................................................ 28 图 21 统计多径类别掩模编辑器 ............................................................................................................. 29 图 22 GTx 的功率与距离建模 ..................................................................................................... 31 图 23 快速查看选择和记录 ............................................................................................................. 32 图 24 数据流 ............................................................................................................................. 33 图 25 信号类型选择 ............................................................................................................................. 34 图 26 GBAS 消息类型 1 和 2 编辑器示例 ...................................................................................... 38

dsnet:用于实时焊接接缝图像分割的动态挤压网络
焊接过程产生的图像噪声(例如弧光,飞溅和烟雾)给基于激光视觉传感器的焊接机器人带来了巨大的挑战,可以定位焊接接缝并准确地进行自动焊接。当前,基于深度学习的方法超过了灵活性和鲁棒性的传统方法。但是,它们的重大计算成本导致与自动焊接的实时要求不匹配。在本文中,我们对卷积神经网络(CNN)和变压器的有效混合体系结构(称为动态挤压网络(DSNET))进行实时焊接接缝分段。更准确地说,开发了一个轻巧的分割框架,以充分利用变压器结构的优势,而无需显着增加计算开销。在这方面,旨在提高其功能多样性的高效编码器已被设计并导致了编码性能的大幅改进。此外,我们提出了一个插件轻巧的注意模块,该模块通过利用焊接接缝数据的统计信息并引入线性先验来产生更有效的注意力权重。使用NVIDIA GTX 1050TI对焊缝图像进行广泛的实验表明,与基线方法Transunet相比,我们的方法将参数的数量减少了54倍,将计算复杂性降低了34倍,并将推理速度提高33倍。dsnet可实现较高的准确性(78.01%IOU,87.64%骰子)和速度性能(100 fps),其模型复杂性和计算负担较低。该代码可在https://github.com/hackerschen/dsnet上找到。

NVIDIA推出了RTX AI PC的AI基础模型
Certain statements in this press release including, but not limited to, statements as to: the benefits, impact, performance, and availability of our products, services, and technologies, including NVIDIA RTX AI PCs, GeForce RTX 50 Series GPUs, NVIDIA Blackwell architecture, GeForce GTX 580, Project R2X, NVIDIA ACE and NIM microservices, NVIDIA AI蓝图,Nvidia Grace Blackwell平台,Llama Nemotron,Nvidia chatrtx,Nvidia rtx神经面孔,Nvidia audio2face-3D模型,Mistral-Nemo-12b-12b语言的教学RTX 6000和5000专业GPU第三方使用或采用NVIDIA的产品和技术,以及其利益和影响; AI以光速前进,从感知AI到生成性AI,现在是Agesic AI的前瞻性陈述,这些陈述符合风险和不确定性,可能导致结果与预期有实质性不同。向SEC提交的报告的副本已发布在公司网站上,可在NVIDIA上免费获得。这些前瞻性陈述不能保证可能导致实际结果差异的重要因素包括:全球经济状况;我们依靠第三方制造,组装,包装和测试我们的产品;技术发展和竞争的影响;开发新产品和技术或对我们现有产品和技术的增强;市场接受我们的产品或合作伙伴的产品;设计,制造或软件缺陷;消费者偏好或需求的变化;行业标准和界面的变化;集成到系统中时,我们的产品或技术的性能意外丧失;以及其他因素不时详细介绍了与美国证券交易委员会(SEC)或SEC的NVIDIA文件中详细介绍的,包括但不限于其表格10-K和表格10-Q的季度报告的年度报告。