XiaoMi-AI文件搜索系统
World File Search SystemGUARANTEED
保单手册 - 附有药品卡的保证附加服务
年份是指从发生第一笔费用之日起的 12 个月期间。除非明确规定时间段为日历年,否则年份的定义用于确定最高限额或频率限制。后续年份从上一年度结束后发生第一笔费用之日起开始。同样,两年是指从发生第一笔费用之日起的 24 个月期间。后续两年期间从前两年结束后发生第一笔费用之日起开始。其他规定的年份期间根据规定的期间数具有相应的含义。

Regis UniversitRegis Universit
ch 230常规化学2和CH 231实验室人文科学(1年)CH 250有机化学I和CH 251实验室CH 450有机化学II和CH 451实验室PH 202A/304A物理学I和PH 203A/305A实验室PH 202B/PHAN 202B/PHACTION II和实验室BL 416/CH452A BL 416/CH452A,至少是两个;实验室,如果有:解剖学,遗传学,微生物学,生理学或免疫学剩余课程要求的硕士学位要求环境生物学
西澳州保证补助:SNAP 家庭沟通策略
立法机构在 2024 年会议上通过了 HB 2214。该法律要求华盛顿学生成就委员会 (WSAC) 向 10、11 和 12 年级的学生(他们的家庭享受补充营养援助计划 (SNAP) 福利)传达从 2025-26 学年开始全额 WA 补助金的承诺。WSAC 与 ideas42(一家使用基于行为科学的方法制定策略和解决问题的全国性非营利组织)合作,制定了一项沟通策略,以吸引 SNAP 家庭中的 WA 补助金接受者。该项目采访和调查的学生和家庭来自大多数学生享受免费和减价午餐 (FRPL) 的学区。确保成功开展沟通的建议是使用具有三个关键组件的提醒和外展系统:

食品供应链担保贷款计划项目
Bottomland Prime LLC 4,950,000 美元 这项农村发展投资将主要用于为收购位于德克萨斯州阿马里洛的定制肉类加工厂(名为 Edes Custom Meats)的临时融资进行再融资。Bottomland Prime LLC 预计其业务将继续包括为当地生产商提供经美国农业部 (USDA) 检验的定制屠宰、为专业市场提供定制屠宰以及牛肉、香肠、肉干、猪肉和羊肉的本地零售。此外,该公司还将通过不同的便利店和冷藏服务拓展批发市场。这项农村发展投资(包括营运资金/结算成本)加上 Bottomland Prime LLC 的贡献将有助于创造 12 个就业岗位并保留 30 个就业岗位。
一个计划内的保证收入选择,可提供可及性,灵活性和可移植性
组可变年金是一种长期投资产品,尤其是为退休目的而设计的。集团年金既包含投资和保险组件,又有费用和费用,包括行政和咨询费。年金的价值随着基础投资期权的市场价值而波动,所有资产都累积了税收剥夺。提款可能会带来税收后果,包括可能的税收罚款。建议投资者在投资之前仔细考虑集团可变年金及其基本投资选择的投资目标,风险和费用。适用的变量年金招股说明书包含有关可变年金及其基本投资选项的此重要信息。请致电800-234-3500以获取招股说明书。在投资或汇款之前仔细阅读。产品和功能可能会符合状态可用性。
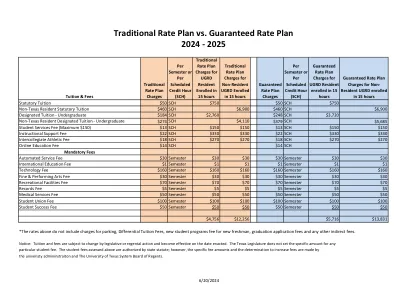
传统利率计划与保证利率计划2024-2025
在15小时内注册的非居民UGRD的保证费率计划费用$ 50 sch $ 750 $ 50 SCH $ 750非TEXAS居民法定学费$ 460 SCH $ 6,900 SCH $ 6,900 $ 460 SCH $ 6,900指定学费 - 指定$ 184 SCH $ 2,760 $ 248 SCH $ 248 SCH-720 TUITION-3,720 tuast-720 tuasts tuasts tuasts tuasts tuasts undergrad-3,720 tuasts tuasts tuasts tuasts $274 SCH $4,110 $379 SCH $5,685 Student Services Fee (Maximum $150) $13 SCH $150 $150 $13 SCH $150 $150 Instructional Support Fee $22 SCH $330 $330 $22 SCH $330 $330 Intercollegiate Athletic Fee $18 SCH $270 $270 $18 SCH $270 $270 Online Education Fee $14 SCH $14 SCH Mandatory Fees Automated Service Fee $30 Semester $ 30 $ 30 $ 30 $ 30学期$ 30 $ 30国际教育费$ 1个学期$ 1 $ 1 $ 1 $ 1 $ 1学期$ 1 $ 1技术费用$ 160学期$ 160学期$ 160 $ 160 $ 160 $ 160 $ 160 $ 160 $ 160罚款和表演艺术费$ 30 $ 30 $ 30 $ 30 $ 30 $ 30学期$ 5 $ 5医疗服务费$ 50学期$ 50 $ 50 $ 50 $ 50学期$ 50 $ 50学生工会费$ 100学期$ 100 $ 100 $ 100 $ 100 $ 100学期$ 100 $ 100学生成功费用$ 50学期$ 50 $ 50 $ 50 $ 50 $ 50 $ 50 $ 50 $ 50 $ 50 $ 50

kcrl:Krasovskii受限的强化学习,并在非线性离散时间系统中保证稳定
摘要 - 学习动力系统需要稳定未知的动态,以避免状态爆炸。但是,标准加固学习(RL)方法缺乏正式的稳定保证,这限制了其用于控制现实世界动态系统的适用性。我们提出了一种新型的政策优化方法,该方法采用Krasovskii的Lyapunov家族作为稳定性约束。我们表明,即使在建模误差下,也可以使用原始偶的方法解决此稳定性受限的优化问题,即使在建模误差下也恢复了基础系统的稳定策略。将此方法与模型学习结合在一起,我们提出了一个基于模型的RL框架和正式稳定性保证,Krasovskii-限制性增强学习(KCRL)。我们在模型学习中使用基于内核的特征表示KCRL,并提供了样本复杂性保证,以学习针对基础系统的稳定控制器。此外,我们从经验上证明了KCRL在学习分布式电源系统的在线电压控制中学习稳定政策的有效性。我们表明,KCRL在各种真实的太阳能和电力需求中稳定该系统,而标准RL方法通常无法稳定。

使用深度强化学习的延迟保证服务的下行链路调度程序
摘要 - 在本文中,我们提出了一种新型的调度方案,以确保单跳无线网络的每包延迟,以延迟关键应用程序。我们考虑了几类具有不同延迟要求的包装,高级数据包在成功传输后产生高实用性。考虑到竞争数据包之间延迟的相关性,我们应用了延迟范围的概念,并为调度决策引入了新的输出增益功能。特别是,选择数据包的选择不仅要考虑其输出增益,还考虑了其他数据包的延迟范围。在这种情况下,我们制定了一个多目标优化问题,旨在最小化平均队列长度,同时在保证每包延迟的约束下最大化平均输出增益。然而,由于环境的不确定性(例如,时变通道条件和随机数据包到达),使用传统的优化技术解决此问题是困难的,而且通常是不切实际的。我们开发了基于深入的增强学习(DRL)的框架来解决它。特别是,我们将原始优化问题分解为一组标量优化子问题,并将它们都作为部分可观察到的马尔可夫决策过程(POMDP)。然后,我们求助于基于双重Q网络(DDQN)的算法,以学习每个子问题的最佳调度策略,这是CanoverComethelarge-ScalestatesPaceAstatesPaceAndredCeanDreduceq-valueoveres-timation。仿真结果表明,我们提出的基于DDQN的算法在奖励和学习速度方面优于常规Q学习算法。此外,与其他基准方案相比,我们提出的调度方案可以显着减少平均延迟和延迟中断率。

附件 T 入伍奖金协议(非保证获得“A”级学校的先前服务或具有合格技能的先前服务)
如果此消息最终未被文档的正确内容所取代,则您的 PDF 查看器可能无法显示此类文档。您可以通过访问 http://www.adobe.com/go/reader_download 升级到适用于 Windows®、Mac 或 Linux® 的 Adobe Reader 的最新版本。如需有关 Adobe Reader 的更多帮助,请访问 http://www.adobe.com/go/acrreader。Windows 是 Microsoft Corporation 在美国和/或其他国家/地区的注册商标或商标。Mac 是 Apple Inc. 在美国和其他国家/地区的注册商标。Linux 是 Linus Torvalds 在美国和其他国家/地区的注册商标。

具有不确定动力学的四四重无人机的安全导航,并保证使用屏障Lyapunov功能避免碰撞
在本文中,在存在干扰,静止和移动的障碍物的情况下,考虑了四摩托无人机(UAV)的安全自动运动控制。在这方面,我们直接将一种分析控制设计方法(在后台框架内)结合在一起,并避免了解决导航问题的障碍。将屏障Lyapunov功能(BLF)纳入了翻译控制中,以使车辆远离安全球,并在障碍物周围构建,同时将其转向所需的位置。BLF允许将障碍物位置直接包含在控制设计中。这是针对已知和未知障碍速度的情况而实现的。此外,在分析中解决了任意初始条件的问题,并从安全领域进行了预先分配的时间。我们还考虑了避免机会约束碰撞的情况。所提出的方法导致了计算上有效的设计,因为获得了控制的封闭形式,而无需实时优化。更重要的是,可以保证闭环系统的分析稳定性。在存在干扰的情况下,设计了一个层次控制结构,具有无适应性模型控制,用于未知态度动力学。进行了许多数值模拟,以评估所提出方法的有效性。