XiaoMi-AI文件搜索系统
World File Search SystemGilpin

“战争中的现实主义”:罗伯特·吉尔平(Robert Gilpin
在第一部分中,我会认为,这两种方法都可以视为现实主义和红外线对身份危机的两种现实主义回应。然而,吉尔平(Gilpin)和华尔兹(Waltz)的反应截然相反。沃尔兹基于权力理论和方法论类似物的纯粹平衡,将国际关系的非常狭窄的身份定义为国际政治。换句话说,这里的现实主义和IR再次重叠,因为IR已被相应地重新定义。吉尔平(Gilpin)受到了许多相互依存文献的挑战,并在修订的现实主义计划中包括各种新因素。他还试图重现现实主义和IR之间的重叠,但是通过重新定义现实主义的方式,以成为领先的,即使是竞争性的理论,即具有更涵盖的主题,即IPE(IPE)。吉尔平的方法在这里矛盾的是,在古典现实主义的传统中,吉尔平都比华尔兹(Waltz)更重要的是,他依赖于一种纯粹是系统性的理论,而吉尔平(Gilpin)有意识地希望对政治经济提出一种现实主义的方法,而沃尔兹(Waltz)则尽最大努力将有限的主题束缚起来。
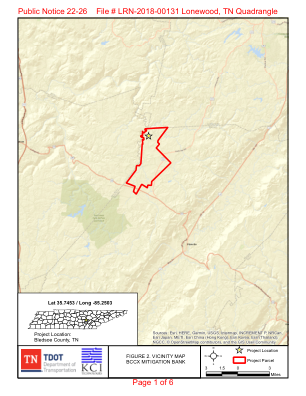
减灾银行支持工具
土壤名称 符号 覆盖率 (Arces) 覆盖率 (百分比) Gilpin 页岩粉砂壤土,坡度为 12% 至 20% GpD 135.7 12% Gilpin 页岩粉砂壤土,坡度为 20% 至 45% GpE 134.0 12% 浅壤土,坡度为 2% 至 6% LyB 193.3 17% 浅壤土,坡度为 6% 至 12% LyC 485.9 44% 浅壤土,坡度为 12% 至 20% LyD 59.6 5% Morehead 很少被淹没 - Bonair 偶尔被淹没的复合体 Mo 63.6 6% Ramsey 沙壤土,坡度为 15% 至 35% RaE 14.9 1% Ramsey-Rock 露头复合体,坡度为 15% 至 35% RrE 25.1 2% 水 W 9.5 1%
人工智能如何彻底改变经济增长——值得关注的关键趋势
这些变化的影响不仅限于数量增长统计数据。人工智能融入经济框架有助于更公平地分配资源和机会。新兴市场常常受到系统性不平等的困扰,它们可以利用人工智能技术跨越传统障碍,使教育、医疗保健和就业更加民主化。因此,人工智能与经济增长之间的联系提供了对繁荣的更全面的理解,其驱动力是技术与人类进步雄心的融合(Aleksei Matveevic Rumiantsev,1983 年;Boughton,1994 年;Canh & Thanh,2020 年;Engels,1844 年;Gilpin & Gilpin,2001 年;Harris,2020 年;IMF,1994 年、2021 年;Keynes,1936 年;列宁,1916 年;马克思,1867 年;OECD,2021 年;Papageorgiou,2012 年;Richardson,1964 年;Rikhardsson 等人,2021 年;Stiglitz,2002 年;世界银行,2003 年;世界银行集团,2024b 年、2024a)。
补充编号 103 Electric Pa. PUC 编号 40 WEST ...
伯特利 吉尔平 北布法罗 南本德 博格斯 霍维 帕克斯 南布法罗 布雷迪斯 本德 基斯基米内塔斯 佩里 舒格克里克 巴雷尔 基坦宁 派恩瓦利 卡多根 麦迪逊 普拉姆克里克 华盛顿 考恩沙诺克 马霍宁 雷伯恩 韦恩 东富兰克林庄园 雷德班克 西富兰克林
人工智能与经济——技术如何重新定义就业和收入分配
您对人工智能的理解不可避免地植根于丰富的历史发展,反映了我们对智能本身的态度的深刻转变。智能作为一个概念,其根源可以追溯到思考思想和认知本质的古代哲学。20 世纪中叶预示着一个分水岭时刻,当时艾伦·图灵和约翰·麦卡锡等先驱开始正式确定当今人工智能的基础原则。图灵的开创性工作提出了机器能够模拟人类推理的想法,从而导致了第一批能够执行简单任务的程序的开发,这开始模糊人机能力之间的界限(Aleksei Matveevic Rumiantsev,1983 年;Boughton,1994 年;Canh 和 Thanh,2020 年;Engels,1844 年;Gilpin 和 Gilpin,2001 年;Harris,2020 年;IMF,1994 年、2021 年;Keynes,1936 年;列宁,1916 年;马克思,1867 年;OECD,2021 年;Papageorgiou,2012 年;Richardson,1964 年;Rikhardsson 等,2021 年;Stiglitz,2002 年;世界银行,2003 年;世界银行集团,2024b
现代求职者面临的挑战和机遇
虽然如今关于人工智能的许多讨论似乎都很现代和新颖,但它的起源可以追溯到 20 世纪中叶,当时计算理论和认知科学领域出现了许多开创性的想法。这个时代的先驱人物,包括艾伦·图灵这样的人物,开始假设机器可以模拟智能行为。图灵在 1950 年发表的开创性论文提出了关于智能本质以及机器是否能够模拟人类认知过程的深刻问题。这一研究为我们现在所说的人工智能建立了一个框架,为未来的发展奠定了基础(Aleksei Matveevic Rumiantsev,1983 年;Boughton,1994 年;Canh 和 Thanh,2020 年;Engels,1844 年;Gilpin 和 Gilpin,2001 年;Harris,2020 年;IMF,1994 年、2021 年;Keynes,1936 年;列宁,1916 年;马克思,1867 年;OECD,2021 年;Papageorgiou,2012 年;Richardson,1964 年;Rikhardsson 等,2021 年;Stiglitz,2002 年;世界银行,2003 年;世界银行集团,2024b 年、2024a)。
新闻通讯 - 任期2 2024/25
新闻通讯 - 学期2 2024/25亲爱的父母/护理人员,我们发现自己在另一个繁忙的学期结束时发现自己,我希望该新闻通讯能为您找到好的,并为圣诞节休息做好准备。我想代表整个匹兹维尔学校社区抓住这个机会,祝大家度过一个安全快乐的节日季节。我期待着我们2025年1月6日星期一返回时所带来的所有第三学期。善意的问候,第一学期结束时,吉尔平·校长的校长,10月24日,星期四,我们举办了年度成就颁奖典礼。晚上提供了一个机会,可以认识并承认和承认学术和牧师的成功,并向我们匹兹维尔社区中一些原本无名的英雄提供启示。我们今年的演讲嘉宾是Roy Blatchford CBE,他在一个拥挤的大厅里散步。很荣幸欢迎他去我们的学校颁发我们的奖项。罗伊(Roy)在协助诉讼程序的一名学校州长伊恩·约翰斯通(Ian Johnstone)上加入了舞台。很高兴看到这么多前任学生返回奖励,与现任学生一起坐在一起,并看到父母和照顾者的骄傲。庆祝成就的前任学生的存在是我们当前学生的真正灵感。我们的高级学生和众议院队长充满信心地讲话。在那些分发计划的人,支持演讲的人和过去和现在的学生,收集奖项的人中有一种极大的社区精神。感谢所有来并支持如此特别的夜晚的人,并向我们所有的获奖者表示祝贺。吉尔平先生和高级领导团队。

精子运动生理学(精子...
发生尾部运动(图07),必须在整个尾巴的整个长度中折叠到两侧,并在尾部的整个长度上激活多甲臂的连接和收缩。在另一侧,多胺的臂保持静止。为了使尾巴返回其余位置,有必要将手臂与尾部折叠部分的相邻微管之间的连接。到达静止位置后,在另一侧有多甲基臂的连接和收缩,导致了不动向运动,称为“主动运动”。当尾部半肢体收缩并以一种无序而激烈的方式放松时,就会发生多动运动,从而促进没有对称性和高幅度的运动(Henry and Echeverri,2013)。有限地制造了轴突收缩的刚度,也就是说,它的收缩有一个限制,这是由细胞本身调节的(Gilpin等,2020)。
2025 年 1 月 12 日
耶稣受洗日周日聚会分享我们的事工敬拜倒计时 TFWS #2251 我们在耶稣基督里受洗欢迎/分享我们的事工请在每个长凳上的红色友谊垫上签名,并将其传递给与您一起坐在长凳上的人。我们的托儿所和幼儿室在楼上开放,虽然没有工作人员,但敬拜是现场直播的。事工时刻 行政委员会 *赞美诗 TFWS #2051 我在那里听到你出生的哭声 与孩子们共度时光 TFWS #2092 像孩子一样(第 1 节) “年度回顾 - 2024” - (马克·迈纳)(孩子们可以离开去楼上的儿童教堂(学前班 - 5 年级)) 人们的祈祷 晨祷 聚集我与你同在 特德·洛德 分享我们的礼物 赠送的礼物 Rype.tv *准备赞美诗 TFWS #2251 我们在耶稣基督里受洗 *福音阅读 路加福音 3:15-17, 21-22 CEB 第 782 页 赞美诗 美妙的生命之语 幸福/吉尔平反思 马克·金普兰牧师 重申洗礼/圣洗礼

可解释人工智能(XAI)
● D. Gunning,可解释的人工智能(xAI),技术代表,国防高级研究计划局(DARPA)(2017)● AB Arrieta,等人。可解释的人工智能(XAI):概念、分类法、机遇和挑战,走向负责任的人工智能。信息融合 58(2020):82-115。● E. Tjoa、C. Guan,可解释的人工智能(XAI)调查:面向医学 XAI (2019)。arXiv:1907.07374。● LH Gilpin、D. Bau、BZ Yuan、A. Bajwa、M. Specter、L. Kagal,解释解释:机器学习可解释性概述 (2018)。 arXiv:1806.00069 ● FK Došilović、M. Brćić、N. Hlupić,可解释的人工智能:一项调查,载于:第 41 届信息和通信技术、电子和微电子国际会议 (MIPRO),2018 年,第 210-215 页。● A. Adadi、M. Berrada,窥视黑匣子内部:可解释的人工智能 (XAI) 调查,IEEE Access 6 (2018) 52138-52160。● O. Biran、C. Cotton,机器学习中的解释和论证:一项调查,载于:IJCAI-17 可解释人工智能 (XAI) 研讨会,第 8 卷,2017 年,第 1 页。● ST Shane、T. Mueller、RR Hoffman、W. Clancey、G. Klein,《人机交互系统中的解释:可解释人工智能的关键思想和出版物及参考书目的文献元评论概要》,国防高级研究计划局 (DARPA) XAI 计划技术代表 (2019)。● R. Guidotti、A. Monreale、S. Ruggieri、F. Turini、F. Giannotti、D. Pedreschi,《解释黑盒模型的方法调查》,ACM 计算调查 51 (5) (2018) 93:1–93:42。