XiaoMi-AI文件搜索系统
World File Search SystemGround

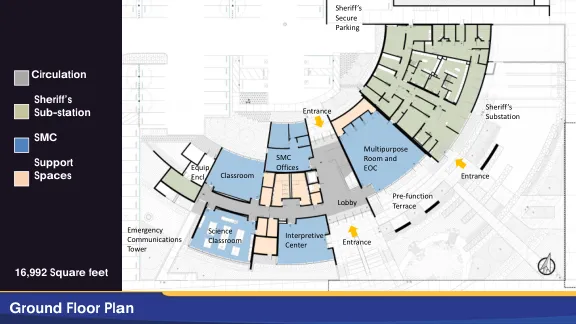
1-fundamentals.pdf - 地面学校
首次飞行 获得单飞所需的“学生飞行员执照” 首次单飞 首次越野飞行 首次长途越野飞行(私人飞行员) 首次夜间越野飞行(私人飞行员) 通过航空笔试 通过飞行检查 – 获得执照 驾驶您的第一位乘客
地面安装 - 太阳能
英国已作出具有法律约束力的承诺,到 2050 年实现零碳经济。英国各地正在建设和运营大型太阳能发电场,公用事业提供商和政府做出了坚定的承诺。JBM 正在与希望获得可观的长期投资回报并为子孙后代保护土地的土地所有者合作。
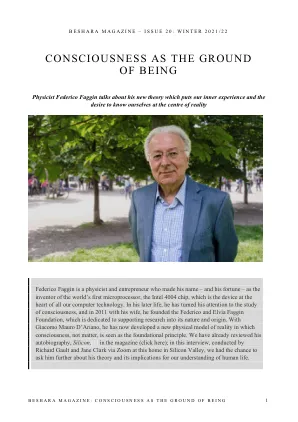
意识是存在的基础
费德里科·法金 (Federico Faggin) 是一位物理学家和企业家,他因发明世界上第一台微处理器 Intel 4004 芯片而声名鹊起,而这款芯片是所有计算机技术的核心设备。晚年,他将注意力转向意识研究,2011 年,他与妻子共同创立了费德里科和埃尔维亚·法金基金会 (Federico and Elvia Faggin Foundation),致力于支持对意识本质和起源的研究。如今,他与贾科莫·毛罗·达里亚诺 (Giacomo Mauro D'Ariano) 共同开发了一种新的现实物理模型,其中意识而非物质被视为基本原则。我们已经在杂志上回顾了他的自传《硅》[1](点击此处);在这次采访中,理查德·高尔特 (Richard Gault) 和简·克拉克 (Jane Clark) 通过 Zoom 在硅谷的家中进行了采访,我们有机会进一步询问他关于他的理论及其对我们理解人类生活的影响。

感应地面定居点
这项研究提出了一种人工智能方法,以考虑多因素之间的相互作用,例如地质条件,施工参数,结构序列以及灌浆体积和时间安排,以预测盾牌隧道过程中的地面沉降。人工智能方法采用了混合神经网络模型,该模型将差异进化算法纳入人工神经网络(ANN)。差分进化算法用于确定ANN的优化结构和超占主米。然后采用自适应力矩估计(ADAM)方法来促进ANN的训练过程。在亚当的强度上,进化算法将进一步增强,以处理大量ANN候选者而不消耗大量计算资源。所提出的混合模型应用于广州地铁线路的盾牌隧道期间的地面定居点的现场案例9。地质条件和屏蔽操作参数首先是通过特征表演策略来表征和量化的,然后是模型的输入。结果使用所提出的混合模型验证预测的准确性。此外,通过部分导数敏感性分析方法,可以确定对地面沉降影响很大的屏蔽操作参数,该方法可以为屏蔽操作提供指导。