XiaoMi-AI文件搜索系统
World File Search SystemHITL
分析人类在循环中的干预模式(hitl ...
在改善了具有增强传感器技术和人工智能(AI)技术的智能控制系统下,从先前的自动化级别到下一个自动化级别(以全自主义为目标),车辆越来越自动化。完全自主的系统是循环的系统,在赋予自主任务时,单枪匹马地决定了正确的行动方案。In all future visions of operating networks of fully autonomous self-driving ground or aerial vehicles, humans are expected to intervene with some kind of remote instantaneous intervention role and ``Human-on- the-Loop (HOTL)'' and ``Human-in-the-Loop (HOTL)'' telemonitoring and telemanipulation is expected to establish a desired level of trust in AVs while they are interacting with a highly dynamic urban or空中环境。许多研究设想具有完全自动的自动驾驶汽车(FA-SDV)的未来,混合流量中的渗透水平不断提高。但是,在高度不确定条件下,在现实世界中有效管理FA-SDV在文献中尚未得到充分检查。该报告通过涵盖了两个智能代理商(人类伸缩师(HTSS)和FA-SDV)之间的遥控合作模式,旨在缩小这一差距。
循环(UIL)中的用户-Finfo
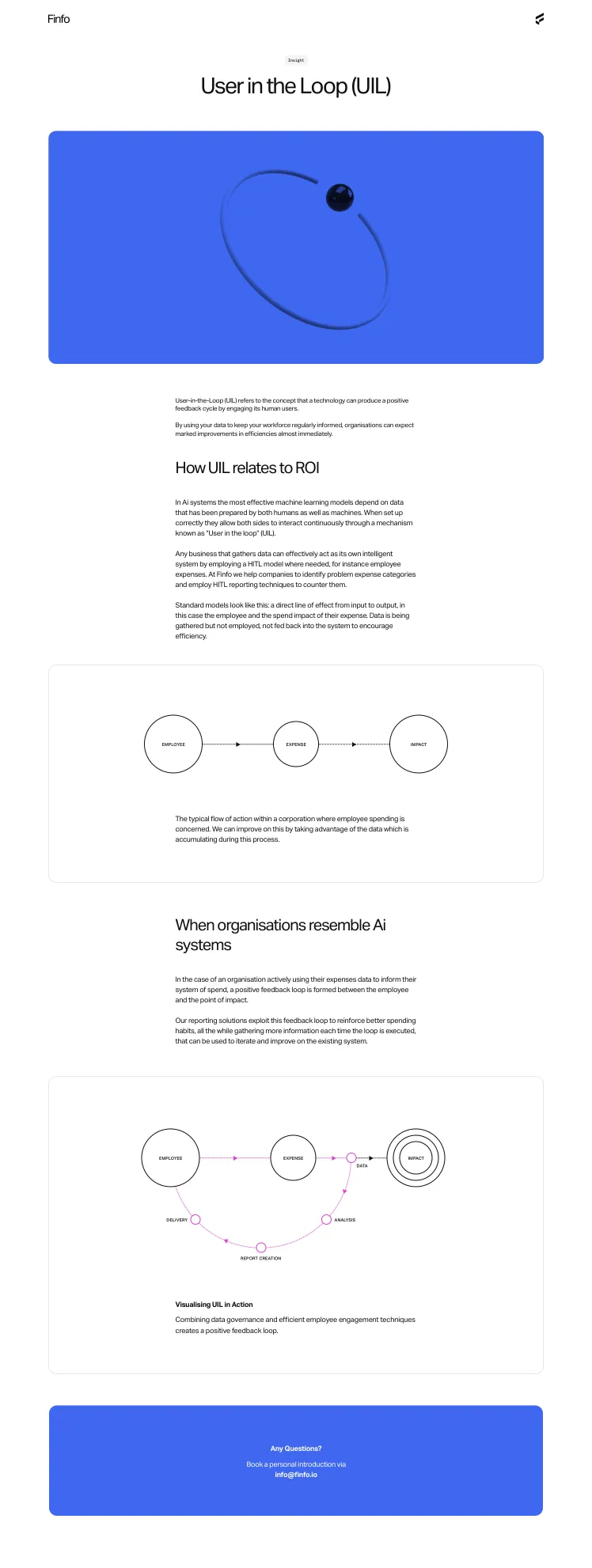
在AI系统中,最有效的机器学习模型取决于人类和机器都制备的数据。正确设置时,它们允许双方通过称为“循环中的用户”(UIL)的机制连续相互作用。任何收集数据的业务都可以通过在需要的情况下(例如员工费用)在需要的情况下采用hitl模型来效力充当其自己的智能系统。在Finfo,我们帮助公司确定问题费用类别并采用HITL报告技术来对抗它们。标准模型看起来像这样:从输入到输出的直接线路,在这种情况下,员工的费用和费用的支出影响。数据正在收集但未使用,而不是回到系统中以鼓励效率。
连续机器学习:您的AI Edge
引入AI时,业务用户最初认为这是一个“魔术解决方案”,然后当它无法独自完成所有操作时感到失望。现在,组织拥有AI的经验,他们希望人类在循环中进行自动化流程(hitl),以便验证一切正在按预期发生。对于信息捕获和IDP,HITL UIS允许人们验证是否基于AI的文档分类和数据提取的结果准确。但是,管理者知道,每当涉及手动任务时,都会发生错误。尽管具有自学习的属性,但自然要想知道CML的自我修复程度如何,以及如果结果开始偏向,您是否可以在引擎盖下重置模型。如果员工犯了一个错误或两个或三个?

与视觉模型识别人类作用识别的共形预测
摘要 - 人类在循环(HITL)框架上是许多现实世界中的计算机视觉系统的特征,使人类操作员能够在AI帮助的情况下做出明智的决定。共形预测(CP)为标签集提供了严格的基于地面真相包容概率的保证,最近已成为HITL设置中有价值的工具。一个关键的应用领域是视频监视,与人类行动识别(HAR)紧密相关。这项研究探讨了CP在使用广泛预先训练的视觉模型(VLMS)的最先进的方法上的应用。我们的发现表明,CP可以显着减少候选类别的平均数量,而无需修改基础VLM。但是,这些减少通常会导致长尾巴的分布。为了解决这个问题,我们引入了一种基于调整VLM的温度参数以最小化这些尾巴的方法而无需其他校准数据的方法。我们的代码可在github上通过地址https://github.com/tbary/cp4vlm提供。索引项 - 符合预测,温度调整,视觉语言模型,人类行动识别。
非机密 JADS JT&E 电子战测试... - DTIC
第 1 阶段(本报告的主题)包括 (1) 在西部试验场 (WTR) 进行风险降低飞行测试,(2) 在 WTR 使用 ALQ-131 干扰吊舱进行基线飞行测试,(3) 在位于德克萨斯州沃斯堡的空军电子战环境模拟器 (AFEWES) 进行短暂的硬件在环 (HITL) 测试,以及 (4) 在位于佛罗里达州埃格林空军基地 (AFB) 的自动多环境模拟器 (AMES) 设施进行系统集成实验室 (SIL) 测试。增加了 HITL 和 SIL 测试以补充基线飞行测试并提供缺失数据。这针对两个指挥制导地对空导弹 (SAM) 站点、一个半主动地对空导弹站点和一个防空炮火 (AAA) 站点建立了环境和干扰器性能数据基线。此场景用于为后续两个 ADS 测试阶段开发 ADS 测试环境,并提供基线数据以与 ADS 测试结果进行比较。此外,性能数据为测试所有三个阶段的关联能力提供了基线。
人类监督是利用相机陷阱图像实现准确人工智能辅助野生动物识别的关键
利用公众支持从大量数据集中提取信息已成为准确标记相机陷阱 (CT) 图像中野生动物数据的一种流行方法。然而,对志愿者工作不断增长的需求延长了数据收集与我们得出生态推断或执行数据驱动的保护行动的能力之间的时间间隔。人工智能 (AI) 方法目前在物种检测(即图像中是否包含动物)和标记常见物种方面非常有效;然而,它对图像中很少捕捉到的物种和视觉上彼此高度相似的物种表现不佳。为了充分利用人类和人工智能分类方法的最佳优势,我们开发了一个集成的 CT 数据管道,其中人工智能提供标记图像的初始传递,但由人类监督和验证(即“人在环”方法)。为了评估分类准确度的提高,我们将人工智能和 HITL 协议生成的物种标签的精度与野生动物专家注释的“黄金标准”(GS)数据集进行比较。人工智能方法的准确性取决于物种,并与训练图像的数量呈正相关。 HITL 的共同努力使 73% 的数据集的错误率低于 10%,并降低了另外 23% 的错误率。对于两个外观相似的物种,人类输入的错误率高于人工智能。虽然与仅使用人工智能相比,将人类纳入循环会增加分类时间,但准确率的提高表明这种方法对于大批量 CT 调查非常有价值。

多架无人机的自适应人机交互
摘要:无人机系统 (UAS) 的进步为逐步提高智能和自主水平铺平了道路,支持新的操作模式,例如一对多 (OTM) 概念,其中单个操作员负责监控和协调多架无人机 (UAV) 的任务。本文介绍了支持 OTM 应用中自适应自动化的认知人机界面和交互 (CHMI 2) 的开发和评估。CHMI 2 系统包括一个神经生理传感器网络和基于机器学习的模型,用于推断用户认知状态,以及包含一组用于控制/显示功能和离散自主级别的转换逻辑的自适应引擎。在离线校准阶段,根据过去的表现和神经生理数据对用户认知状态的模型进行训练,随后在在线适应阶段使用这些模型来实时推断这些认知状态。为了研究 OTM 应用中自适应自动化,开发了一个涉及丛林火灾检测的场景,其中单个操作员负责指挥多个无人机平台在广阔区域内搜索和定位丛林火灾。我们介绍了开发的 UAS 模拟环境的架构和设计,以及各种人机界面 (HMI) 格式和功能,以通过人机在环 (HITL) 实验评估 CHMI 2 系统的可行性。随后将 CHMI 2 模块集成到模拟环境中,提供实现自适应自动化所需的感知、推理和适应能力。进行了 HITL 实验以验证 CHMI 2

飞行员和空中交通管制员在终端计量操作期间使用间隔管理
此 HITL 模拟活动旨在检查相对间隔概念(间隔管理 [IM])与终端排序和间隔 (TSAS) 提供的未来绝对间隔终端计量环境的集成。空中交通管制员和机组人员利用当今的自动化功能以及终端计量和 IM 的增强功能来测试集成的可接受性和必要的间隔意识信息。两组都有不同的间隔信息集,并在几种交通场景中进行检查。结果表明 IM 与终端计量兼容,但应继续检查支持 IM 信任的适当管制员和机组人员工具。提出了概念和操作建议,包括对 IM 相关显示的增强。

必须量化重要工程项目的结果以确保其成功和安全:审查
必须在设计/规划阶段量化关键工程项目的结果,以确保其成功和安全,而且由于操作故障的概率实际上永远不会为零,因此这种量化应在概率基础上进行。本文讨论并简要回顾了一些最近发表的关于航空航天电子和光子 (E&P) 产品的概率预测模型 (PPM) 和概率可靠性设计 (PDfR) 的研究,包括人在回路 (HITL) 问题和挑战。最近,这项工作被“带到现实中”,以模拟自动驾驶 (AD) 中可能发生的碰撞。此外,还解决了 E&P 和车辆工程领域以外的一些问题和任务,目的是展示如何有效和富有成效地运用开发的方法和方法,无论何时需要量化工程技术的可靠性并考虑人的表现。

面向具有内在反馈的交互式强化学习
强化学习 (RL) 和脑机接口 (BCI) 在过去十年中经历了显着增长。随着人们对人机在环 (HITL) 的兴趣日益浓厚,将人类输入与 RL 算法相结合催生了交互式 RL 子领域。与此同时,BCI 领域长期以来一直对从神经活动中提取信息性脑信号以用于人机交互感兴趣。这两个领域之间的关键联系在于将神经活动解释为反馈,以便可以采用交互式 RL 方法。我们将这种新兴的反馈媒介称为内在反馈。尽管内在反馈能够自动甚至无意识地传达,但两个社区基本上都没有对这一关键环节进行适当的探索。因此,为了帮助促进更深入的理解和更有效的利用,我们提供了一个教程式的回顾,涵盖了内在反馈及其基础概念的动机、方法和未解决的问题。