XiaoMi-AI文件搜索系统
World File Search SystemHRC

金欣生殖集团有限公司
集团在进入壁垒较高的市场中建立了品牌、技术、医护人员和管理方面的竞争优势。集团网络中建立的所有医院均被公认为其各自区域市场的一流医院,包括但不限于四川省、粤港澳大湾区、云南省及美国西部,这有助于集团在中国和美国的辅助生殖服务市场中占据领先地位。2021年,集团收购了四川锦新西南医院(锦绣校区)、RHC(品牌名称:Gratia Medical Center)和ARC,以扩大其在四川省和粤港澳大湾区的版图,并使其服务产品多样化,提供涵盖备孕、试管婴儿、产前、分娩和产后的全生命周期生育服务。集团于2022年2月收购深圳中山医院新物业,该物业将于2025年上半年正式投入运营,旨在抓住深圳及大湾区对辅助生殖服务预期增长及日益增长的需求,通过提升空间及环境因素扩大其容量,并拓展VIP服务以满足患者的多维度需求。集团亦完成收购九州医院及何万家医院控股权,从而进一步扩大公司在中国西南地区的市场份额及影响力。2022年底,集团进行内部重组,使四川锦新西南医院(锦绣院区)能够进一步扩大其服务范围,并根据适用中国法律提供涉及分子遗传学服务的医疗服务,该服务是产前检查的尖端技术。 2023年4月,成都西南诊所及四川锦新西南医院(锦绣院区)将其辅助生殖技术相关医疗牌照合并至四川锦新西南医院,凭借卓越的医疗质量及优越的服务体验,分别在辅助生殖技术、妇产科及儿科业务领域建立良好声誉及提升市场影响力。我们预期将进一步促进两家医院的协同效应,并增强集团的竞争力及声誉。作为我们增长策略的一部分,HRC医疗一直吸引及招募新医生,以加强其在美国辅助生殖技术行业的业务发展及市场份额。2023年,HRC医疗成功招募6名新医生,其中3名于2023年开始在HRC医疗执业,另3名将在未来1至2年内入职。 HRC Management 继续与美国领先的私立研究型大学南加州大学(“ USC ”)及其凯克医学院生殖与不孕不育内分泌科的生育医学实践(“ USC Fertility ”)合作。我们进一步深化了与 USC Fertility 的合作,(i) USC Fertility 的医生在 HRC 旗下的帕萨迪纳诊所执业并提供临床服务;(ii) 在 HRC 的支持下,参与 USC 进修计划的医生人数从 2 人增加至 4 人,以培养更多医生;(iii) HRC 管理层与 USC Fertility 共同成立研究委员会,合作开展 IVF 相关临床研究,以提高生育治疗的质量。

诺克斯堡政策备忘录 3 - 对区域的安装支持......
2023 年 8 月 23 日 — 满足要求(例如,第 19 工程兵营是唯一一个拥有伊丽莎白镇专用车辆的驻地单位 - 与 HRC 合作...
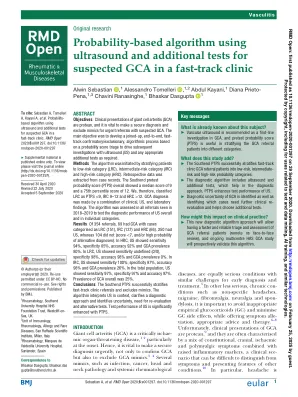
最初的基于研究概率的算法使用超声和其他测试,可疑的GCA
巨型细胞动脉炎(GCA)的抽象目标临床表现是蛋白质的,进行安全诊断并排除疑似GCA紧急转介的模仿至关重要。主要目标是基于概率得分分码,开发一项连接,端到端,快速轨道确认性/排除算法,算法过程,以通过要求进行超声(US)进行后续研究和任何适当的其他测试。方法该算法是通过将患者分层为低风险类别(LRC),中等风险类别(IRC)和高风险类别(HRC)启动的。回顾性数据是从案例记录中提取的。Southend预测试概率得分(PTP)的总成绩中位数为9,第75个百分点得分为12。因此,我们将LRC分为PTPS <9,IRC 9-12和HRC> 12。GCA诊断是通过临床,美国和实验室发现的结合进行的。在2018年至2019年的所有推荐中评估了该算法,以测试美国整体和各个类别的诊断性能。354个转诊的结果,89个具有GCA,案例分为LRC(151),IRC(137)和HRC(66)。250有我们,而104没有(得分<7和/或替代诊断的概率很高)。在HRC中,美国的灵敏度为94%,特异性为85%,准确性92%和GCA患病率80%。在LRC中,美国显示灵敏度不确定(0/0),特异性98%,准确性98%和GCA患病率0%。在IRC中,美国表现出100%的敏感性,特异性97%,准确性98%和GCA患病率为26%。 在总人口中,美国的敏感性为97%,特异性97%和准确性97%。在IRC中,美国表现出100%的敏感性,特异性97%,准确性98%和GCA患病率为26%。在总人口中,美国的敏感性为97%,特异性97%和准确性97%。GCA的普遍性总体为25%。结论Southend PTP成功地分层了快速诊所的推荐并排除了模仿。该算法在上下文中解释了我们,阐明了诊断方法并确定不确定性,重新评估和替代测试。通过PTPS显着提高了我们的测试性能。

关于人类与肉手合作的全面综述,用于不确定和动态拆卸
摘要。随着寿命终止(EOL)产品的不断增加以及工业4.0相关技术的出现,在再制造过程中的手动劳动力密集型拆卸逐渐逐渐转移到人类 - 机器人协作(HRC)。但是,有必要考虑当前机器人涉及的自动拆卸中最常见的方法,具有较高的效率和适应性。本文的目的是总结现有的人类 - 机器人协作拆卸技术,以进一步讨论各种技术在拆卸过程中的可能应用,从而对未来的研究方向进行全面的评论。本文对HRC拆卸过程中遇到的技术问题进行了分析,该过程提供了以机器人为核心的智能拆卸平台的摘要,重点是对HRC拆卸的优化。此外,还审查了相关技术,以讨论智能拆卸系统,包括网络物理系统(CPS),物联网(IoT),云计算,人工智能(AI)和数字双胞胎(DT)。各种优化方法的工业应用已经讨论了多个机器人和人类在任务分配,协作决策和绩效评估的观点中的合作的潜在研究趋势,重点介绍了工业拆卸线中数字双技术的应用趋势。

关于道德的建议书初稿...
又注意到《联合国发展权利宣言》(1986 年);《当代人对后代人的责任宣言》(1997 年);《世界生物伦理与人权宣言》(2005 年);《联合国土著人民权利宣言》(2007 年);《关于气候变化的伦理原则宣言》(2017 年);《关于科学和科学研究人员的建议》(2017 年);《关于人工智能伦理的建议》(2021 年);《关于开放科学的建议》(2021 年);人权理事会关于“数字时代的隐私权”的决议(A/HRC/RES/42/15)(2019 年);人权理事会关于“新兴数字技术与人权”的决议(A/HRC/RES/41/11)(2019 年),以及联合国《工商企业与人权指导原则》(2011 年),

人机相互作用作为活性推理
为了与机器人无缝互动,用户必须推断机器人行为的原因 - 并对该推断(及其预测)保持一致。因此,信任是人类机器人协作(HRC)的必要条件。然而,尽管它具有至关重要的作用,但它仍然在很大程度上未知信任如何出现,发展和支持人类与技术系统的关系。在以下论文中,我们回顾了有关信任,人类机器人相互作用,HRC和人类互动的文献。早期的信任模型表明,这是仁慈与能力之间的权衡;尽管对人类互动的研究强调了共同行为和相互知识在逐步建立信任中的作用。我们继续引入一种信任模型,作为代理商的最佳解释,以与扩展的汽车厂或合作伙伴进行可靠的感觉交流。该模型基于主动推论的认知神经科学,并建议在HRC的背景下,可以根据对人工药物的虚拟控制来施放信任。交互式反馈是扩展受托人感知行动周期的必要条件。该模型对理解人类机器人的互动和协作具有重要意义,因为它允许人类信任的传统决定因素,例如归因于受托人的仁慈和能力,可以根据层次的主动推断来定义,而可以用信息交换和授权来描述脆弱性。此外,该模型强调了用户反馈在HRC期间的作用,并建议在个性化互动中使用无聊和惊喜作为对系统过度依赖的标志。将信任作为虚拟控制感的描述为扎根人为因素而在认知神经科学领域迈出了至关重要的一步,并改善了以人为中心的技术的设计。此外,我们研究了共同行为在信任起源中的作用,尤其是在二元协作的背景下,这对人类机器人协作系统的可接受性和设计产生了重要的后果。

人机相互作用作为活性推理
为了与机器人无缝互动,用户必须推断机器人行为的原因 - 并对该推断(及其预测)保持一致。因此,信任是人类机器人协作(HRC)的必要条件。然而,尽管它具有至关重要的作用,但它仍然在很大程度上未知信任如何出现,发展和支持人类与技术系统的关系。在以下论文中,我们回顾了有关信任,人类机器人相互作用,HRC和人类互动的文献。早期的信任模型表明,这是仁慈与能力之间的权衡;尽管对人类互动的研究强调了共同行为和相互知识在逐步建立信任中的作用。我们继续引入一种信任模型,作为代理商的最佳解释,以与扩展的汽车厂或合作伙伴进行可靠的感觉交流。该模型基于主动推论的认知神经科学,并建议在HRC的背景下,可以根据对人工药物的虚拟控制来施放信任。交互式反馈是扩展受托人感知行动周期的必要条件。该模型对理解人类机器人的互动和协作具有重要意义,因为它允许人类信任的传统决定因素,例如归因于受托人的仁慈和能力,可以根据层次的主动推断来定义,而可以用信息交换和授权来描述脆弱性。此外,该模型强调了用户反馈在HRC期间的作用,并建议在个性化互动中使用无聊和惊喜作为对系统过度依赖的标志。将信任作为虚拟控制感的描述为扎根人为因素而在认知神经科学领域迈出了至关重要的一步,并改善了以人为中心的技术的设计。此外,我们研究了共同行为在信任起源中的作用,尤其是在二元协作的背景下,这对人类机器人协作系统的可接受性和设计产生了重要的后果。

人机协作中影响人类决策的因素有哪些?:范围审查
摘要:工业 4.0 的到来预示着人机协作 (HRC) 的进步,因此有必要更深入地了解影响该领域人类决策的因素。本范围审查考察了对 HRC 进行的研究广度,特别侧重于确定在协作任务中影响人类决策的因素,并寻找改善人类决策的潜在解决方案。我们在 Scopus、IEEE Xplore 和 ACM 数字图书馆等数据库中进行了全面搜索,采用滚雪球技术确保纳入所有相关研究,并采用 PRISMA 范围审查扩展 (PRISMA-ScR) 进行审查过程。确定了一些重要方面:(i) 研究的设计和设置;(ii) 人机交互的类型、协作机器人的类型和任务的类型;(iii) 与人类决策相关的因素;(iv) 人机交互的用户界面类型。结果表明,认知工作量和用户界面是影响 HRC 决策的关键。未来的研究应考虑社会动态和心理安全,使用混合方法获得更深入的见解,并考虑不同的协作机器人和任务以扩展决策研究。新兴的 XR 技术有潜力增强互动,从而改善决策,强调直观沟通和以人为本的设计的必要性。

基于自适应学习的基于人类与肉手对抗游戏的多模式数据融合框架
在人类和机器人之间玩游戏已成为广泛的人类与机器人对抗(HRC)应用程序。尽管提出了许多方法来通过组合不同的信息来提高跟踪准确性,但仍需要解决机器人智能程度的问题以及运动捕获系统的抗干扰能力。在本文中,我们提出了基于自适应的增强学习(RL)多模式数据融合(ADARL-MDF)框架,教机器人手与人类一起玩摇滚纸 - 剪裁(RPS)游戏。它包括一种自适应学习机制,以更新整体分类器,一个RL模型,为机器人提供智力智慧,以及一个多模式数据融合结构,为干扰提供了阻力。相应的实验证明了ADARL-MDF模型的上述功能。比较精度和计算时间通过结合K-Nearest邻居(K-NN)和深卷积神经网络(DCNN)来表明集合模型的高性能。此外,基于深度视觉的K-NN分类器获得100%的识别精度,因此可以将预测的手势视为实际值。演示说明了HRC应用的实际可能性。该模型所涉及的理论提供了发展HRC智能的可能性。©2023作者。由Elsevier Ltd.这是CC下的开放访问文章(http://creativecommons.org/licenses/4.0/)。
ACS模板
人工智能(AI)在行业4.0中人类机器人合作(HRC)中的功能在4.0中绝对重要,不能被低估。它使用机器学习(ML)和深度学习(DL)来增强智能制造中人与机器人之间的协作。这些算法有效地管理和分析了传感器,机械和其他相关实体的数据。作为结果,他们可以提取重要的见解,这些见解可以有益于整体优化制造过程。因为愚蠢的制造系统阻碍了各种制造过程组件之间的协作,协作和沟通。因此,效率,质量和生产力全部遭受了整体的影响。此外,人工智能(AI)可以实现复杂的学习过程,从而在制造业领域的组装任务中可以在与人类人类互动相当的水平上进行学习,从而增强人类机器人的协作和有效性。当人工智能(AI)被广泛应用于人类机器人合作(HRC)时,创建了一个新的且动态的人类合作环境,并在社会和物理空间中分配和分配责任。总而言之,人工智能(AI)在行业4.0框架内促进有效有效的人类机器人合作(HRC)中起着至关重要且不可或缺的作用。基于人工智能(AI)的算法的实施,包括深度学习,机器学习和强化学习,这是高度的,因为它可以增强人类机器人的协作,简化生产程序,并提高制造业中的整体生产率,质量和效率。