XiaoMi-AI文件搜索系统
World File Search SystemHeight

确定大气高度的方法...
本文件是作为美国政府机构赞助的工作记录而编写的。美国政府、加利福尼亚大学及其任何员工均不对所披露的任何信息、设备、产品或流程的准确性、完整性或实用性做任何明示或暗示的保证,也不承担任何法律责任或义务,也不表示其使用不会侵犯私有权利。本文以商品名、商标、制造商或其他方式提及任何特定商业产品、流程或服务并不一定构成或暗示美国政府或加利福尼亚大学对其的认可、推荐或支持。本文表达的作者的观点和意见不一定代表或反映美国政府或加利福尼亚大学的观点和意见,不得用于广告或产品代言目的。

工程高空安全解决方案
密闭空间支撑系统 76 BTRENCHSAFE® 地面挖掘和沟槽系统 77 BTRENCHSAFE® 救援/回收吊艇架套件 79 BTRENCHSAFE® 铝制设备储物箱 79 BTRENCHSAFE® 出入支撑平台 80 BTRENCHSAFE® 梯子通道防坠落柱套件 81 BTRENCHSAFE® 铝制重型梯子 81 BTRENCHSAFE® 铝制交叉走道 82 BTRENCHSAFE® 铝制可调式夹紧护栏 83 BTRENCHSAFE® 可调式夹紧护栏储物架 83 BTRENCHSAFE® 护栏用钢制屏障网 84 BTRENCHSAFE® 移动式锚固立方体 (MAC) 85

预测未来糖尿病的高度比率
结果:在中位随访期为7.02年,最大随访为13年,记录了320个新发育糖尿病。调整了混杂因素并比较标准化危险比(HRS)后,WC被证明是在所有模型中反射糖尿病风险的最佳简单人体测量指标,其次是WHTR。时间依赖性的ROC分析表明,WC在短期内预测糖尿病的发生(2 - 5年),而WHTR在预测中等至长期(6-12岁)中的糖尿病发生方面具有最高的AUC,而在任何时间点,WC和WHTR都比BMI更高的AUC均高。此外,我们发现在BMI和WC的阈值中相对较大的闪光来预测糖尿病,而WHTR的阈值
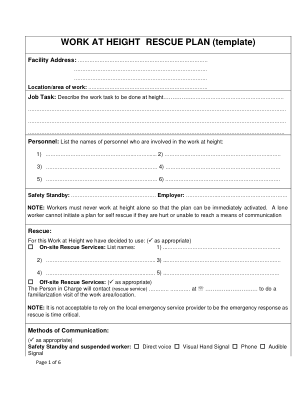
高空作业救援计划(模板)
(勾选 即可) 救援梯 遥控救援工具包 建筑物和屋顶的钥匙 电梯 通过窗户/阳台将工人拉进来 通过地板/楼板/屋顶将工人拉上来 攀爬/沿建筑物/结构沿绳下降 悬挂式通道设备 地面高空设备 起重机吊篮 ……………………………………………...(列出其他) 所需病人降低系统/降低区域…………………………………………………………………… 高空锚固 …………………………………………………………………………………………………………… 锚固点: 梁 楼梯间 支撑柱 支撑柱 其他:….………………………… 需要预装配吗? 是 否 需要牵引系统…………………………………………………………...………………………… 需要病人降低系统/降低区域…………………………………………………………...… 头顶锚点…………………………………………………………………………………………….….…

对飞机高度和噪音的感知 (Imm-15)
普遍认为,在给定噪音水平下,当地社区会认为飞机比其他噪音源更令人烦恼 [2]。我们的文献综述还发现,不同的研究报告了“社区中飞机噪音烦恼持续增加”:对于相同噪音水平,这些研究记录了比 10 年前更多的烦恼 [6]。烦恼增加的原因尚不清楚:部分研究界将其归因于飞机起降次数 [7] 和机队组成的“变化率”(例如在 1 年或 5 年的范围内 [8] [9]),而其他人则报告了对飞机态度的普遍变化以及非声学因素的权重增加 [10]。《抵达评论》 [5] 中详细描述了飞机高度对社区感知的影响,并在其他地方非常简要地提到过 [11] [12],这表明视觉和声学因素共同起作用。这种跨模态相互作用对声学判断的影响在安静区域的背景下得到了强调 [13],但在飞机情况下其存在性需要进一步了解。本研究是首次尝试解决社区感知的这一方面。

收割机割台高度调节技术
Keywords: BP neural network, fuzzy control, cutting platform height, multisensor ABSTRACT In this paper, BP neural network is used to collect header height, AMEsim is used to simulate and analyze header height adjustment hydraulic system, and fuzzy PID control is used to adjust header lifting hydraulic cylinder to stabilize header height. The experimental results of harvesting different crops show that under the header height automatic control system, the error between the actual height of crop harvesting and the set height is within 15 mm, and the harvesting effect is good, which can meet the automatic regulation requirements of the header height of the multi crop combine harvester. 摘要 为了提高调节的精度,采用 BP 神经网络多传感器融合处理技术采集割台实时高度,通过 AMEsim 软件对割台 高度调节液压系统进行仿真分析,最后采用模糊 PID 控制比例电磁阀调节割台升降液压缸从而稳定割台高度。 通过收获油菜、谷子和水稻的试验结果证明:在割台高度自动控制系统下,作物收获的实际高度与设定高度误

相移的空间分辨高度响应...
摘要。在用于图形计量的相移干涉仪性能评估中,高度响应或高度传递函数很少被考虑,因为在大多数应用中,测量的是光滑表面,并且只关注最低的空间频率。对于不确定度较低的测量,重要的是要了解高度响应作为被测表面的空间频率内容的函数,特别是当它包含频率位于干涉仪空间频率通带高端的形状误差分量时。使用一个直径为 140 毫米的图案区域镜子来评估光谱响应,该镜子由几个具有不同空间频率的子图案组成。我们的目标是开发一种方法,以有效地映射相移干涉仪圆形视场上的光谱响应。描述了一种表示光谱响应对干涉仪视场依赖性的新方法。 © 2010 光学仪器工程师协会。� DOI:10.1117/1.3488052 �

实地测量的树高是否如人们所想的那样可靠
由于有效采样困难,不同来源的树高观测值的定量比较很少。本研究调查了通过常规现场清查、机载激光扫描 (ALS) 和地面激光扫描 (TLS) 获得的树高观测值的可靠性和稳健性。进行了一项精心设计的无损实验,其中包括斯堪的纳维亚北方森林 18 个样地 (32 m × 32 m) 中的 1174 棵树。ALS 数据的点密度约为 450 点/平方米。TLS 数据是通过从样地中心和四个象限方向进行多次扫描获得的。ALS 和 TLS 数据都代表了最前沿的点云产品。借助现有的树木图,从 ALS 和 TLS 点云中手动测量树高。因此,评估结果揭示了应用激光扫描 (LS) 数据的容量,同时排除了单株树检测等数据处理方法的影响。通过对 ALS、TLS 和基于现场的树高进行交叉比较,评估了不同树高源的可靠性和稳健性。与 ALS 和 TLS 相比,现场测量对林分复杂性、树冠等级和树种更敏感。总体而言,现场测量倾向于高估高大树木的高度,尤其是共显性树冠等级的高大树木。在密集的林分中,中等和抑制树冠等级的小树的现场测量高度也存在很大的不确定性。基于 ALS 的树高估计在所有林分条件下都是稳健的。树越高,基于 ALS 的树高越可靠。由于难以识别树梢,基于 ALS 的树高的最大不确定性来自中等冠级的树木。使用 TLS 时,可以预期低于 15-20 米高的树木的可靠树高,具体取决于林分的复杂性。LS 系统的优势在于数据几何精度的稳健性。LS 技术在测量单个树木高度方面面临的最大挑战在于遮挡效应,这导致 ALS 数据中遗漏了中等和抑制冠级的树木,TLS 数据中高大树木的树冠不完整。