XiaoMi-AI文件搜索系统
World File Search SystemHexagon

开发2.4米级的镜子用于空间 -
摘要 - 本文追踪了从空间和地面空间的地面监视早期历史的重要组成部分。Itek和Perkin-Elmer Corp是光学的重要提供者,其中包括2.4米的级别镜子,主要是为我们的地球观察开发的,是“间谍”卫星,随后用于从地面跟踪弹道导弹。两个重要的卫星计划是KH-9,称为六角形,现在已被解释,KH-11(最初称为肯南(Kennan)于1982年更名为Crystal,并被归类为Crystal。也许是这些基于空间的2.4-m镜子中最著名的镜子是在哈勃太空望远镜上使用的,该望远镜稳步生产出了壮观的天文学科学,并继续这样做。那些相同轻巧的2.4-m镜子也非常适合用于部署快速起飞的分类程序,基于地面的望远镜跟踪和成像大陆弹道导弹(ICBM)。剩余的2.4米后视镜之一被解密,并找到了进入新墨西哥州技术的方式,在那里它成为了Magdalena Ridge天文台的基础。本文追溯了轻巧的2.4米级镜子的历史以及Itek和Perkin-Elmer之间的相互交织的关系。两家公司都经历了个人转型,分手和收购,最终在休斯丹伯里光学系统公司中汇聚在一起。

RF微电子
RF简介:RF范围,皮肤效应,行为和等效电路,如R,L,C,高RF。传输线理论,反射系数,史密斯图计算,阻抗匹配,S-参数。(L-7&T-2)RF设计中的基本概念:RF DC设计。六边形无线通信标准,非线性,谐波,增益压缩,脱敏,交叉调制,间调制失真(IMD),输入截距(IIP3&iip3&iip2),符号间干扰。噪声,主动设备的噪声分析。(L-8&T-2)RF系统中的基本块及其VLSI实施:RF的MOSFET行为,晶体管和香料模型的建模,HEMT和MESFET等高速设备,BICMOS技术,BICMOS技术,在高频及其单声道实现的寄生元素及其单层实现者的集成寄生元素,低噪声效果和低噪声器设计。(L-10和T-4)振荡器:基本VCO拓扑,相位噪声,噪音功率权衡。谐振器较少的VCO设计,GHz频率混合器设计和问题,射频综合:PLL,各种RF合成器体系结构和频率分隔线。(L-9&T-3)反式接收器体系结构:TRF接收器,杂化接收器,同伴接收器,不同的接收器拓扑,RF接收器体系结构及其设计问题,集成的RF过滤器,IC应用程序,IC应用程序和案例研究,用于DECT,GSM和蓝牙。(L-8&T-3)

协调关税 - Jacobsens
7318.15.43 other bolts with Hexagon heads of iron or stainless stell ends, screw students and screw students), (excluding that imported from originating in: Afghanistan, Albania, Algeria, Angoa, and Babuda, Armenia, Azerbaijan, Bangladesh, Bahrain, Benin, Brunei Darussalam, Bolivia, Botswana, Brazil, Bulgaria, Burundi, Cambodia, Cameroon, Cape verde, Central African Republic, Chad, Chile, Colombia, Colombia, Congo (republic of the), Costa Rica, Côte djibouti, Dominican republic, ecuador, egyp t (arab republic of), el salvador, eswatiin, equatorial guinea, ethiopia, gabon, gambia, ghana, guatemala, guatemala- bissau, haiti, indonesia, iran (islamic Ublic of), Jamaica, Jordan, Kazakhstan, Kenya, Koorea (Democratic People), Kyrgyzstan Republic, Kuwait, Lao People's Democratic Republic, Latvia, Lebanon, Liberia, Libya, Lithuiania, Madagascar, Madawi, Mali, Marshall Islands, Mauritania, Mauritius, Mexico, Moldova (republic of), Montenegro, O, Mozambique, Myanmar, Namibia, Nepal, Niger, North Macedonia, Oman, Palau, Paanama, Paraguay, Peru, Philippines, Romeia, Russian Federation, (k ingdom of), Saint Kitts and Nevis, Saint Vincent and the Great, Samoa, São Tomé and Principe, Samoa, Serbia, Senegal, Senegal, Sierra Leone, Singapore, South suden, Sri Lanka, Sudane,, Syrian Arab Republic, Tanzania (United Republic of), Togo, Tridad and Tobago, Turkmenistan, Tuval, Uganda, Uruguay, Uzbekistan, Uzbekistan, Vanuatu, Venezuela Bolivarian Republic of), Vietnam,West Bank and Gaza (State of Palestine), Yemen, Zambia, Zimbabwe)

行业洞察:视觉技术行业报告
每年支出(百万欧元) 5 年 EBITDA 公司名称 EV LTM 销售额 EPS 增长率 EV/销售额 EV/EBITDA AMETEK, Inc. 30,787 5,789 9% 30% 5.2x 17.4x Antares Vision SpA 524 224 NM 16% 2.1x 9.2x Basler Aktiengesellschaft 622 272 16% 13% 2.4x 16.9x Bruker Corporation 11,103 2,368 26% 22% 4.3x 20.1x Carl Zeiss Meditec AG 11,029 1,963 6% 21% 5.1x 22.4x Cognex Corporation 7,137 941 NM 29% 8.5x 34.0x Datalogic SpA 472 655 21% 10% 0.7x 5.9x FARO Technologies, Inc. 413 324 30% -2% 1.2x 20.5x Hexagon AB (publ) 31,213 5,286 10% 34% 5.8x 14.4x Jenoptik AG 2,143 981 12% 18% 2.0x 10.5x Kapsch TrafficCom AG 345 529 NM 0% 0.6x 9.1x Nynomic AG 209 106 NM 14% 1.8x 11.1x Olympus Corporation 20,939 6,625 11% 29% 3.4x 11.4x OMRON Corporation 10,025 6,066 2% 14% 1.8x 12.8x OPT 机器视觉技术有限公司 2,185 157 20% 27% 10.3x 32.5x Stemmer Imaging AG 257 155 25% 17% 1.5x 8.9x Teledyne Inc. 20,527 5,081 7% 24% 3.9x 16.0x TKH Group NV 2,186 1,817 NM 14% 1.1x 7.2x Tomra Systems ASA 4,357 1,137 5% 15% 3.5x 17.1x Varex Imaging Corporation 987 811 25% 14% 1.2x 8.3x Viscom AG 127 106 NM 8% 1.1x 8.0x Zebra Technologies Corporation 15,289 5,296 NM 20% 2.9x 13.1x 平均值 15% 18% 3.2x 14.9x 中位数 12% 16% 2.2x 13.0x
化学群体理论-II。晶体固体中的对称性
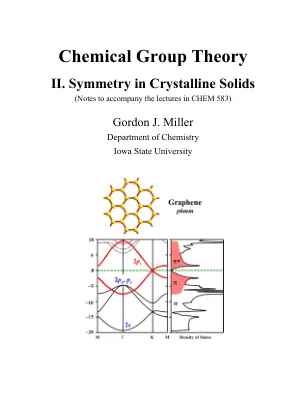
(1)晶体结构:识别分子和固体的结构对称性对于了解其物理和某些化学特性的性质很重要。分子对称性由一个点组总结,为此,所有对称元素(点,轴,平面)在一个固定点上相交,该固定点被分配为空间坐标系的起源。例如,考虑使用点组𝒟6h。起源在没有原子的分子中心。其一些对称元素包括六倍旋转轴和六个垂直镜面;相应的操作是由2π/6(60°)的倍数旋转和反射。晶体固体在空间中的多个点显示旋转对称性,因为这些结构也表现出转化周期性,这是由晶格描述的。旋转和翻译对称操作的组合产生了一个空间群。考虑石墨烯的结构,该结构由融合的六元环的平面网络组成。如果忽略了平面中结构的终止,则每个六角形的中心都有六倍的旋转轴,并且每个碳原子都与三倍的旋转轴相交。翻译周期性由连接每个六角形中心的单位单元(平行四边形)表示。作为另一个例子,Cenic 2的结构包含[NIC 2]的平面与[NIC 2]平面的七元环上方和以下的CE原子平面交替。在沿堆叠方向的该结构的投影中,单位单元格是一个矩形,垂直镜面显而易见。此外,这种晶体结构还有另一种类型的对称性操作,对于任何分子:滑动反射而不会发生,其中通过镜面的反射是平行于(沿着(沿着)反射平面的(“滑行”)的位移。自身反射或自身位移都不是对称操作,但是两个操作的组合是用于Cenic 2结构。

使用
关键词:光束法区域网平差、自校准、系统校准、非度量相机 摘要 使用市售的非度量相机(例如佳能、尼康)进行摄影测量操作正变得非常流行。使用它们的原因有几个,例如有效载荷更轻、传感器成本低、尺寸更小,以适应有限的机载空间(例如无人机作为数据采集平台)、快速周转项目、易于更换等。与使用数字高分辨率度量图像传感器(Hexagon DMC、Microsoft Vexcel UltraCam 系统等)相比,所有这些属性都具有优势。然而,为了获得接近使用度量系统获得的结果,必须考虑上述非度量图像传感器的所有系统误差;对它们进行建模并消除(或尽量减少)它们对所获取图像的影响。本文回顾了与使用非度量图像传感器相关的功能和随机模型。将关注传感器内部校准参数,即校准焦距、主点、对称 - 非对称 - 切向镜头畸变模式和可能严重扭曲所获取图像的其他偏差。为此,使用焦距为 50 毫米的尼康 D810 数码相机在摄影测量测试场区域“Franklin Mills Mall”进行相机校准。该场地覆盖了多个飞行高度,分别产生 15 和 30 厘米 GSD 的图像。飞行了两个垂直摄影测量飞行带,具有高端搭接和侧搭接。测试场区域拥有大约 25 个目标控制和检查点,这些点的测量精度为 2 厘米或更高。使用 PIX4Dmapper(专为从无人机或地面获取的图像而创建的软件包)对上述图像进行自动空中三角测量。导出图像观测结果(ASCII),并使用汉诺威莱布尼茨大学程序系统 BLUH 进行相应的束流区域调整,该系统能够通过附加参数(十二个标准加上不同失真模式的中型非度量数字相机)进行自我校准。调查中使用了不同数量和分布的地面控制点 (GCP) 和检查点 (ChkPts)。本文介绍了结果。

媒体发布 - 太平洋能源
太平洋能源今天宣布收购澳大利亚领先的绿色氢气生产和加油设施交钥匙供应商 ENGV。在收购 ENGV 的同时,太平洋能源还与全球最大的电解器制造商挪威 Nel ASA 达成了在澳大利亚和新西兰的多年独家供应协议。收购 ENGV 进一步提升了太平洋能源的内部能力。它使该集团成为澳大利亚唯一一家可持续分布式能源供应商,该供应商拥有内部能力来提供和整合所有可再生能源技术和服务,包括太阳能、风能、电池、液化天然气和现在的氢气,以及传统的燃气和柴油发电。ENGV 成立于 2013 年,是氢气、天然气、生物甲烷和液化石油气所有领域的全方位服务提供商,并随着澳大利亚清洁能源市场的不断发展而成长。它被公认为绿色氢气和可再生气体服务和解决方案的市场领导者。 ENGV 是澳大利亚第一家部署氢气和可再生气体技术的组织,也是经验最丰富的组织,已完成多个设计和安装项目,包括加氢站设施、电解器和燃料电池。该公司与全球领先的氢气和可再生气体生产、加气、压缩和运输设备供应商签订了一系列长期供应协议,包括 Nel、Hexagon Purus、PowerCell 和 KwangShin。太平洋能源集团首席执行官 Jamie Cullen 表示,他很高兴宣布 ENGV 加入该集团。“这是一项令人难以置信的激动人心的收购,也是我们集团的里程碑,因为我们开始了一项全国性增长战略,并为完成我们的可再生能源能力架构添加了最后一块拼图。近年来,我们见证了行业的转型,我们的潜在新项目渠道已发展到由可再生能源组成的约 75%。相比之下,几年前这一比例还不到 20%,现在我们为采矿、工业和政府客户提供了所有主要可再生能源技术的全套交钥匙能力。” “作为一家着眼于未来的组织,我们的目标是成为该领域可再生能源技术的领先者,为客户实现脱碳目标做出贡献。ENGV 在氢气和可再生气体领域的专业知识和经验的引入将推动我们实现这些目标,同时我们将继续投资于清洁能源解决方案。

顶级| Haupa Baltics
Roomy and organised – the HAUPA tool trolley HUPtransporter Pro provides a lot of space for tools Extremely sturdy case: polypropylene (PP) housing, with gas pressure springs, fit for flight: automatic air pressure release valve, stackable, dust-proof, protected against water splashes, temperature stable from -30°C to +80°C, ergonomic two-component handle, eyelets for padlock,铝制分隔系统,泡沫插入可选,颜色:黑色,带有所有者标签,工具手推车huptransporter 220820内容:•安全护目镜•电线脱衣机0.2-6mm²•UNI电线脱线器0.2-4mm² VDE全能柔软的剪剪剪子160毫米,70mm²•VDE压接钳子,弯曲200毫米•VDE电缆切割器160毫米•VDE对角线切割器160毫米*•VDE组合钳钳180 mm*切刀钩刀片50毫米•开关柜扳手•切割机叶片hupblackseries18•切割机叶片hupblades18•带钩刀片的刀具8-28mm²•单手电缆切割器最大。Ø34毫米•深孔标记,2合为1,黑色,带卷卷动器•电子ESD侧切割器,无刀片115毫米•六边形头部偏置螺丝刀套件,带球头,9 pcs,1.5-10毫米,超长PZ 1 + 2 | PH 1 + 2 • VDE electrician's screwdriver HUPslim * 3.5 x 0.6 x 100, 4 x 0.8 x 100 mm, 4 x 1 x 100 mm, 5.5 x 1 x 125 mm, 6.5 x 1.2 x 150 mm • Electrician's chisel 10 x 250 mm • Flat oval stone chisel 32 x 300 mm • Ratchet ring spanner 4 in 1, 8 x 10 + 12 x 13 mm • Ratchet ring spanner 4 in 1, 10 x 13 + 17 x 19 mm • Enclosure spirit level 200 mm • Light metal spirit level 400 mm • Measuring tape 5 m • Scale 1 m • LED torch Pen Torch • Locksmith's hammer 500 g • Puk saw with fixed handle • Voltage tester Profi LED Plus 12 - 1,000 V • FlexBagPro ratchet screwdriver set • PU cut protection glove level 3, grey, size 10
TESSERAE 大型空间结构项目
• 制造按比例缩小的机电基元:为测试组装和构造概念,在实验室中构建了约 1:50 的缩小实验硬件平台。最受探索的几何形状之一“巴基球”提供了高效的表面积与体积比,接近球体。对于太空应用,考虑到将预制表面覆层发射到轨道的成本高昂,最好在给定表面积下最大化体积。这些结构基元允许快速进行原型设计、迭代,以及通过几何和磁性对结构粘合的物理和机电特性进行评估。具体而言,瓦片之间的二面角粘合角为巴基球或其他封闭形状建立了适当的壳几何形状,磁体行为由计算代码和每个瓦片中的电力电子设备控制。主要构建两种类型的基元:可自组装成空心结构的壳瓦片,例如巴基球的五边形和六边形瓦片(图 1);和细胞节点(即准六面体)可自组装成填充空间的设计,例如截角八面体线的堆叠。我们使用了多种 3D 打印技术来制造外壳,为了获得更精确的公差,我们优先使用光固化光聚合物打印机。这些瓷砖通过电池和超级电容器组合供电,在我们最新的国际空间站 (ISS) 测试原型上,其规格为 2 到 3 秒内产生 20 W 脉冲(图 2)。一套定制的电子元件(包括传感器、LED、中央处理器和数据存储器)安装在预制的 PCB(印刷电路板)上,这些 PCB 运行 Python 和 C++ 中的自组装算法代码。 • 微重力测试:这些微型平台随后在微重力环境中进行测试,测试范围从抛物线“零重力”飞行中反复出现的 15-20 秒失重期,到亚轨道火箭实验室内三分钟的漂浮,再到国际空间站上为期多天的轨道任务(图 3)。当被释放到这些微重力环境中漂浮时,瓷砖会记录传感器数据,摄像头会捕捉镜头进行分析,为下一系列迭代原型提供信息。这些微重力测试对于全面了解在优化的瓷砖质量与磁场强度比下的自组装行为至关重要。对于国际空间站任务,要么使用密闭实验箱进行纯自主轨道测试,瓷砖必须在其中自行启动,要么在宇航员看管的实验中将瓷砖释放到开放过道中,以获得更大的测试空间。 3 为了补充小规模硬件测试,我们使用了一套机器人模拟软件(特别是 Cyberbotics 的 WeBots)来生成人类居住规模的轨道上自组装行为的数学严格模型。

科学、空间和技术委员会之家... - GovInfo
主席 S TEVENS。听证会即将开始。如无异议,主席有权随时宣布休会。早上好,欢迎参加与研究和技术小组委员会以及能源小组委员会的联合听证会。也热烈欢迎我们尊敬的证人小组。今天是献给每一位学生、研究人员、工程师、一线工人、产品经理和美国家庭的,他们对美国工业地位的未来、我们无限的创新潜力和我们劳动力的实力感到好奇。这次听证会的灵感来自于美国对卓越的动力和渴望,软件工程师与装配工人相遇,以提供前所未有的质量,我们在哪里以及如何创新未来。特别要欢迎他的前同事,来自密歇根州第 11 区的选民,来自位于威克瑟姆和特洛伊的 Hexagon Manufacturing Intelligence 的 Ryan Myers 先生。美国制造业是一个由多个机构组成的网络,它汇集了多个联邦机构、大型和小型制造商、大学、社区学院和非营利组织,以促进新技术、满足研究需求并培训未来的劳动力。这一举措源于一项政策处方,旨在回答我们作为一个国家在后衰退时代面临的问题:我们如何制定有竞争力的创新议程,并确保研究和技术在我们的社区中进行,并与包容性和必要的利益相关者合作?我很荣幸能够认可我们在先进制造业创新方面的振兴方法所取得的成就,以及过去十年许多人为实现这一目标所付出的努力。从扬斯敦的一个试点机构开始,由国家国防制造和机械加工中心牵头,美国制造业已经投资于 3D 打印技术的开发和供应链采用。此外,他们还为国家制定了劳动力培训路线图,包括退伍军人培训计划。美国制造业研究院是美国在先进制造业领域全球领导地位的重要组成部分。这些研究院为美国工业和学术界提供了一个独特的协作平台,以交流一流的专业知识来解决挑战并推动创新。它们还为各种规模的行业合作伙伴创造了宝贵的机会,使他们能够建立网络、共享数据、交换技术和开展新业务。中小型企业占美国所有制造企业的 98%,这些研究院为保持企业竞争力至关重要的研究和创新提供了独特的途径,而这些工作是他们无法独自完成的。正如我们今天将听到的那样,私营部门一直大力支持美国制造业研究院。在该计划实施期间,支持承诺已增至 30 多亿美元,10 亿美元的联邦资金加上超过 20 亿美元的非联邦投资。联邦政府在催化新研发方法方面的作用仍然至关重要,并确定了美国制造业机构的价值。它需要联邦领导将所有利益相关者带到