XiaoMi-AI文件搜索系统
World File Search SystemHils

基于视觉的无人机控制硬件在环仿真平台
由于无人机系统精密且昂贵,测试期间存在财产损失风险以及政府法规,因此设计和测试无人机的控制算法非常困难。这需要对控制器进行大量模拟以确保稳定性和性能。但是,模拟无法捕捉飞行控制的所有方面,例如传感器噪声和执行器滞后。出于这些原因,使用硬件在环仿真 (HILS) 平台。本文介绍了一种用于无人机视觉控制的新型 HILS 平台。该 HILS 平台由虚拟现实软件组成,可生成投射到屏幕上并通过摄像头查看的逼真场景。飞行硬件包括一架无人机,其机载自动驾驶仪与虚拟现实软件接口。该无人机可安装在风洞中,通过伺服翼型来调节姿态。� 2009 Elsevier Ltd. 保留所有权利。
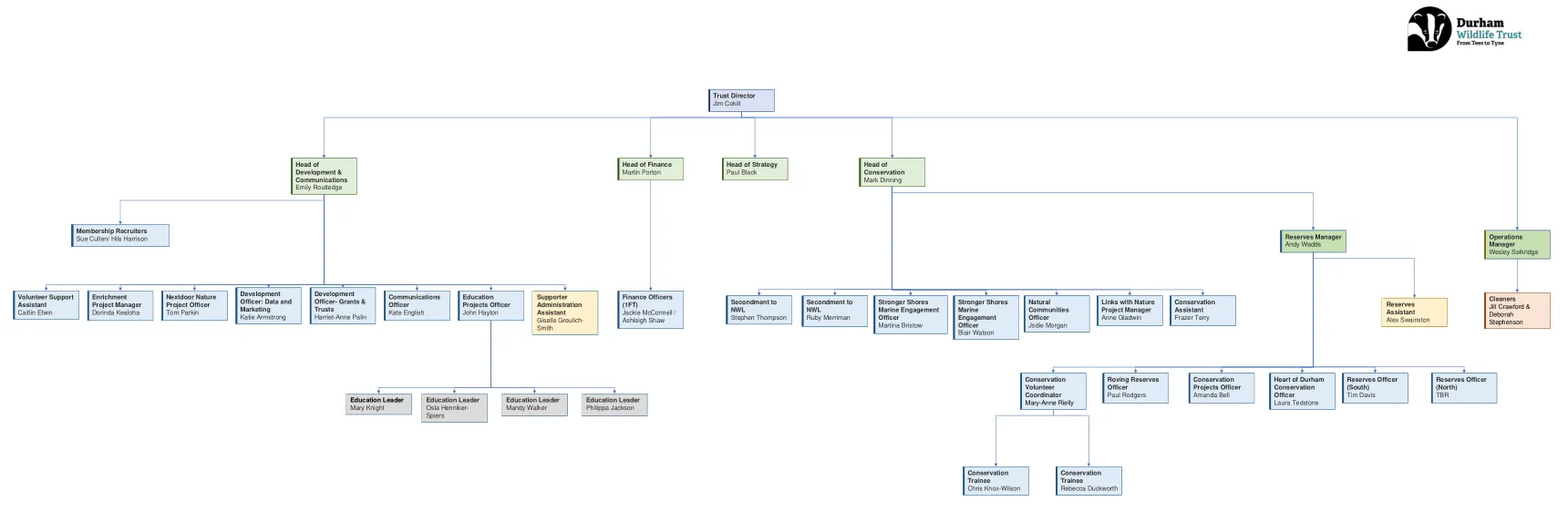
住房目标
通过将家庭收入的数据和可负担能力纳入住房目标,本研究的住房目标将建议对新的租金到收入(RGI)以及负担得起的租金和所有权住所进行投资,以适当地容纳小家庭和大家庭。•RGI单位(1,517个新住宅净)旨在容纳低于家庭收入限制(HILS)用于RGI住房的尼皮西辛地区低收入区的家庭。•负担得起的租赁单位(2,949个新住宅净)将针对在尼皮斯(Nipissing)第六收入分列或以下的家庭,但将属于用于RGI住房的HILS。这些单位可能包括由DNSSAB或其他非营利性负担得起的租赁单位管理的单位。•负担得起的所有权单位(1,697个净新住宅)将以负担得起平均市场租金但无法负担得起的自有住宅现有住房市场价值的家庭。•市场住房(32,236个住宅)代表了DNSSAB司法管辖权控制和DNSSAB范围之外的所有住房。

ASAT-14-003-GU 14
摘要:仿真对于系统设计和分析,尤其是飞行控制系统来说是必不可少的。仿真技术之一是硬件在环仿真 (HILS),它将硬件和软件连接起来进行综合,目的是克服建模过程中的任何简化假设。这种类型的仿真的好处是减少所需的飞行试验次数,并提高系统设计可实现性的置信度。因此,本文讨论了图像红外 (IIR) 导引头系统的实施和评估,其中系统集成是通过 HILS 进行研发 (R&D) 的。IIR 导引头组件包括热像仪、视频跟踪器和转向系统,分别进行分析和测试。深入分析并找出组装的整体系统中的接口问题,以评估 IIR 导引头的性能。IIR 导引头提供的真实热目标坐标应用于自导系统的六自由度 (6DOF) 飞行模拟模型。介绍了与系统相关的实验装置,其中的模拟和实验结果突出了构成 IIR 导引头的各种组件的效果。提出了平滑滤波器来增强对执行不确定\随机机动的目标的拦截,并克服视频跟踪器和转向系统的动态,以实现导弹焦油

利用超维计算进行符号表示和学习
有人提出,机器学习技术可以从符号表示和推理系统中受益。我们描述了一种方法,其中可以通过使用超维向量和超维计算以自然而直接的方式将两者结合起来。通过使用哈希神经网络来生成图像的二进制向量表示,我们展示了如何构建超维向量,以便从其输出中自然产生向量符号推理。我们设计了超维推理层 (HIL) 来促进这一过程,并评估其与基线哈希网络相比的性能。除此之外,我们还表明,单独的网络输出可以直接在 HIL 中的向量符号级别融合,以提高整体模型的性能和稳健性。此外,据我们所知,这是第一次在真实数据上创建有意义的图像超维表示,同时仍保持超维性。